측정 행렬 불확실성에 강인한 압축 센싱 신호 복원
본 논문은 압축 센싱에서 측정 행렬에 발생하는 제한된 가산 오차(Measurement Matrix Uncertainty, MMU)를 고려한 새로운 복원 알고리즘을 제안한다. MMU를 ‖·‖∞-bounded additive error 로 모델링하고, 이를 반영한 혼합 L2‑L1 제약식(Anti‑Uncertainty Constraint, AUC)을 도출한다. AUC와 전통적인 L1 최소화(스파스 제약)를 결합해 Anti‑Uncertainty Ope…
저자: Yipeng Liu, Qun Wan, Fei Wen
본 논문은 압축 센싱(Compressive Sensing, CS)에서 측정 행렬의 불확실성(Measurement Matrix Uncertainty, MMU)이 기존 스파스 신호 복원 알고리즘에 미치는 부정적 영향을 해결하고자 한다. 서론에서는 CS가 제한된 샘플링으로 스파스 신호를 복원하는 강력한 프레임워크임을 강조하면서, 대부분의 기존 방법(OMP, BP, Dantzig Selector 등)이 측정 행렬을 완벽히 알 수 있다는 가정 하에 설계되어 실제 시스템에서 발생하는 행렬 오차에 취약함을 지적한다. MMU는 이미지 처리의 유한 주파수 그리드, 채널 추정의 제한된 CIR 그리드, ADC의 별칭, 지터, 양자화, 비선형 효과 등 다양한 실용적 상황에서 나타난다.
두 번째 섹션에서는 MMU를 포함한 신호 모델을 수식적으로 제시한다. 실제 측정 행렬 A는 알 수 없으며, 관측 행렬 B는 A에 가산 오차 V가 더해진 형태(B = A + V)이다. V는 ‖V‖∞ ≤ δ 로 제한되는 bounded random matrix이며, δ는 행렬 오차의 최대 크기를 나타낸다. 관측 벡터 y는 y = Aθ = Bθ – Vθ 로 표현된다. 여기서 θ는 N 차원 스파스 벡터이며, 대부분의 원소가 0 혹은 거의 0이다.
전통적인 스파스 복원 방법을 요약한 세 번째 섹션에서는 BP와 DS가 L1 최소화 혹은 제곱 오차 제약을 이용해 복원을 수행하지만, MMU를 고려하지 않기 때문에 실제 상황에서 복원 정확도가 급격히 떨어진다는 점을 강조한다.
핵심 기여는 네 번째 섹션에서 제시된다. 저자들은 Vθ에 대한 ‖Vθ‖2 ≤ δ‖θ‖1 라는 부등식을 도출하고, 이를 기반으로 Anti‑Uncertainty Constraint(AUC)를 ½‖y – Bθ‖2² ≤ δ‖θ‖1 로 정의한다. 이 제약은 스파스 신호의 L1 노름과 측정 오차의 L2 제곱을 동시에 제한한다. AUC와 기존 L1 최소화(스파시티) 제약을 결합하면 최적화 문제는 다음과 같이 정리된다:
min ‖θ‖1 subject to ½‖y – Bθ‖2² ≤ δ‖θ‖1
이를 다시 t라는 스칼라 변수 도입을 통해
min t subject to ½‖y – Bθ‖2² ≤ δ t, ‖θ‖1 ≤ t
의 형태로 변형하면 표준 SOCP(Second‑Order Cone Programming) 형태가 된다. 따라서 SeDuMi와 같은 기존 convex solver 로 손쉽게 해결 가능하다. 저자들은 이 복원 연산자를 Anti‑Uncertainty Operator(AUO)라 명명한다.
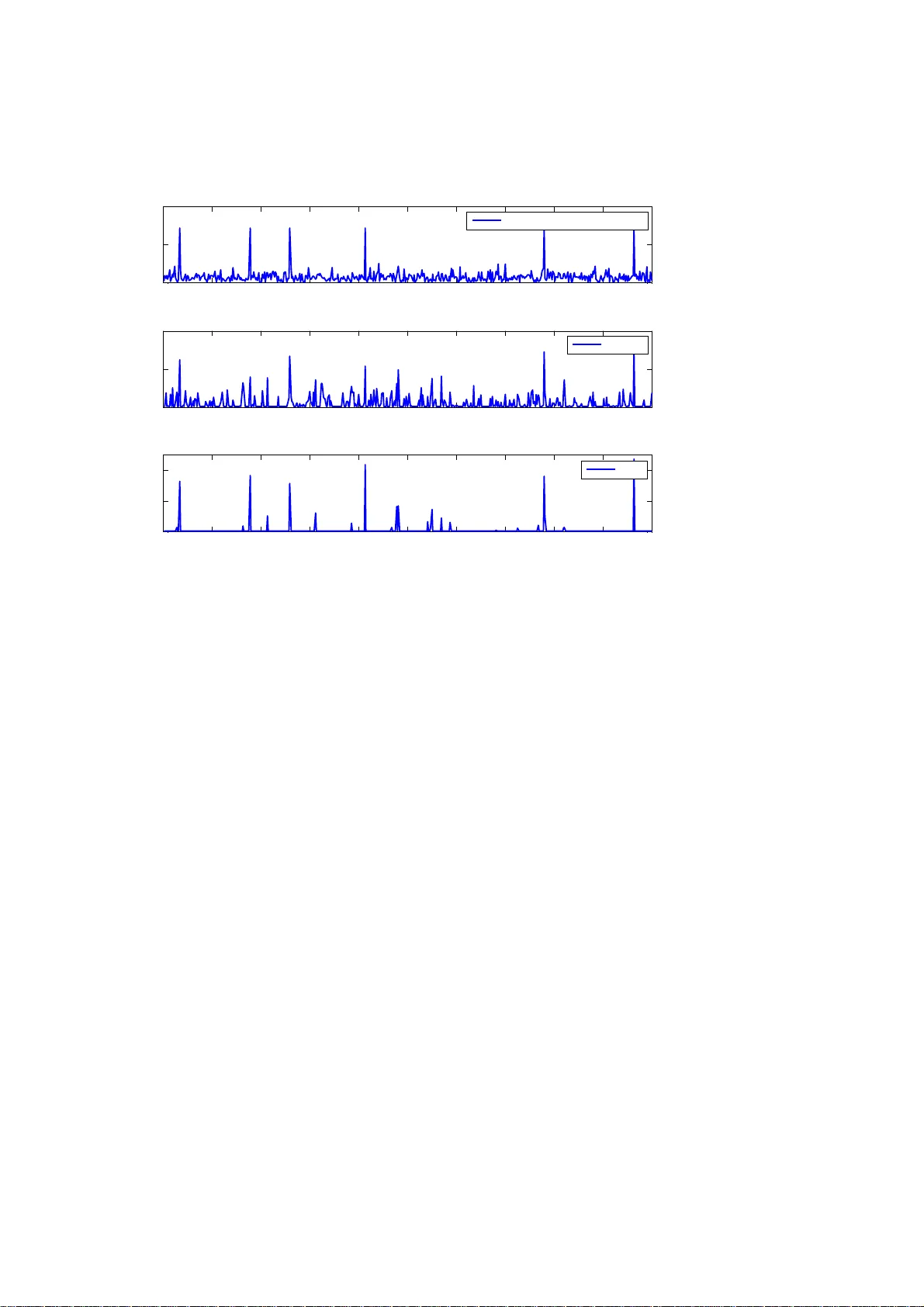
다섯 번째 섹션에서는 시뮬레이션 설정과 결과를 상세히 제시한다. 실험 파라미터는 N=500, M=125, K=6, δ=0.7 로 설정했으며, V는 Gaussian random matrix이며 ‖V‖∞ ≤ δ 를 만족한다. 실제 행렬 A는 단위 행렬에서 무작위로 M개의 행을 선택한 sub‑sampling matrix이다. 1000번의 독립 실험을 통해 복원된 신호를 평균화한 결과, BP는 높은 잡음으로 인해 비제로 성분을 정확히 식별하지 못했으나 AUO는 비제로 성분을 명확히 복원하였다.
정량적 평가는 잘못 추정된 원소 수 ρ를 정의한 식(15)를 이용했다. ρ는 “실제로 0인 원소를 비제로로 추정한 수 + 실제 비제로인 원소를 0으로 추정한 수” 로 구성된다. Figure 2는 비제로 원소 개수 K가 증가함에 따라 BP와 AUO 모두 ρ가 증가하지만, AUO가 항상 더 낮은 ρ를 보이며 특히 K가 6 이하일 때 차이가 크게 나타난다. Figure 3은 측정 수 M이 증가함에 따라 ρ가 감소하는 경향을 보여주며, 동일한 M에 대해 AUO가 BP보다 consistently lower ρ를 기록한다. 특히 M이 30~140 사이일 때 AUO의 성능 향상이 두드러진다.
결론에서는 AUO가 MMU 환경에서 기존 BP 대비 복원 정확도와 잡음 억제 측면에서 우수함을 재확인한다. 향후 연구 과제로는 이론적 복원 보장(예: RIP 조건 하에서의 정확도 한계) 분석, greedy 알고리즘 설계, 그리고 다중 측정 벡터(MMV) 상황으로의 확장이 제시된다. 또한 δ 값에 대한 민감도 분석과 실시간 구현을 위한 계산 복잡도 최적화도 필요하다고 언급한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기