지구 움직임을 밝히는 별빛 나침반
초록
펄스 신호를 이용한 상대론적 위치결정법을 검증하기 위해, 네 개의 원거리 펄서로부터 얻은 도착 시각 데이터를 활용해 이상적인 지구 표면점의 세계선을 재구성하였다. 시뮬레이션에서는 수신기 시계 정확도가 핵심 변수이며, 연속 데이터가 제공될 경우 수백 미터 수준의 위치 정확도를 달성한다. 결과는 태양계 전역 탐사 및 인공 신호 기반 자율 항법에 적용 가능함을 시사한다.
상세 분석
본 논문은 “상대론적 위치결정(Relativistic Positioning System, RPS)”이라는 개념을 구체적인 시뮬레이션을 통해 검증한다. RPS는 무한히 먼 천체, 여기서는 회전 주기가 매우 안정적인 펄서를 신호원으로 삼아, 수신기가 측정한 펄스 도착 시각을 기반으로 자신의 4‑좌표를 역산하는 방식이다. 핵심 수학적 도구는 각 펄서에 대한 null four‑vector, 즉 펄스 주기와 전파 방향 코사인으로 정의되는 4‑벡터이며, 이들 네 개가 선형 독립이면 수신기의 시공간 위치를 고유하게 결정할 수 있다.
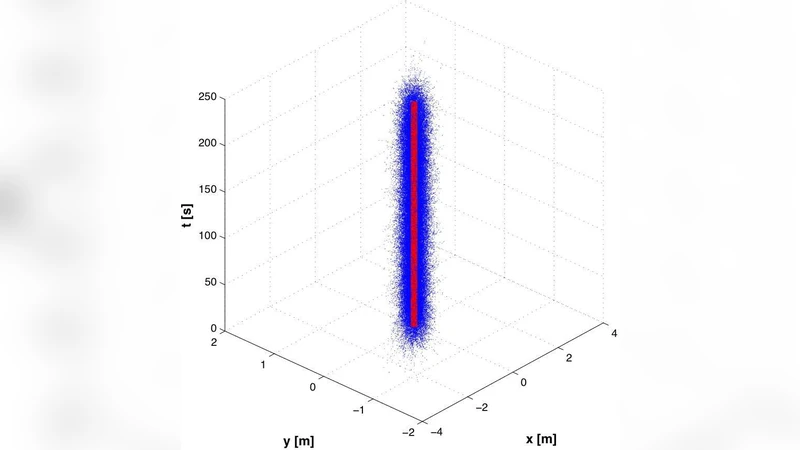
논문은 먼저 수신기가 정지해 있는 이상적인 경우를 다루어, 시계 오차와 펄서 변동성을 파라미터화한 ‘불확실성(uncertainty)’가 위치 재구성에 미치는 영향을 정량화한다. 여기서 가장 큰 영향을 미치는 요소는 수신기 내부 시계의 정확도이며, 이는 펄스 도착 시각 측정 오차와 직접적으로 연결된다. 시뮬레이션에서는 시계 오차와 펄서 변동을 합친 총 불확실성을 1 µs 수준으로 설정했으며, 이 경우 재구성된 위치 오차는 수백 미터에 달한다.
다음 단계에서는 실제 지구 표면상의 관측점(호주 파크스 전파망원경)에서 네 개의 펄서 신호를 수신한다고 가정하고, 3일간의 도착 시각 데이터를 이용해 움직이는 수신기의 세계선을 복원한다. 이때 가시성 제약(지구 차폐)과 펄서의 실제 스핀‑다운, 맥동 변동 등 복잡한 물리 현상은 의도적으로 배제하고, 순수하게 수학적 모델과 시계 오차만을 고려한다. 결과는 ‘거친’ 적용에서는 수백 킬로미터 수준의 오차를 보였지만, 연속적인 데이터 스트림을 가정하고 적절한 수치 해석 기법(예: 최소제곱법, Kalman 필터)을 적용하면 오차를 수백 미터 이하로 축소할 수 있음을 보여준다.
논문의 가장 큰 의의는 이 방법이 외부 인프라(예: GPS 위성)와 완전히 독립적인 자율 항법을 가능하게 한다는 점이다. 특히, 인공적인 펄스 발생원(예: 고정밀 레이저 혹은 마이크로파 송신기)을 우주에 배치한다면, 시계 정확도와 송신 주기의 안정성만 확보하면 태양계 전역에서 수십 킬로미터에서 수백 미터 수준의 위치 추정이 실현될 수 있다. 이는 현재의 딥스페이스 미션에서 통신 지연과 지구 기반 추적 시스템에 의존하는 문제를 크게 완화시킬 잠재력을 가진다.
요약하면, 논문은 (1) null four‑vector 기반 RPS 이론의 실용성을 수치 실험으로 입증, (2) 시계 정확도가 시스템 전체 성능을 좌우함을 강조, (3) 연속 데이터와 고급 수치 처리로 위치 정확도를 실용적인 수준으로 끌어올릴 수 있음을 시연한다. 향후 연구 과제로는 펄서 가시성 모델링, 실제 펄서 잡음 특성 반영, 그리고 인공 신호원 설계 및 배치 최적화가 남아 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기