전 세계 웹캠을 활용한 현실적인 차량 네트워크 모델링
초록
본 논문은 전 세계 10개 도시의 2,700여 대 교통 웹캠에서 수집한 125백만 장의 이미지(7.5 TB) 데이터를 기반으로, 배경 이미지 차감 기법을 이용한 교통 밀도 추정 알고리즘을 제안한다. 분석 결과 대부분의 카메라와 도시별 집계가 Log‑Logistic 혹은 Gamma 분포를 따르며, 장기 의존성과 자기유사성이 존재함을 확인한다.
상세 분석
이 연구는 차량 네트워크 시뮬레이션에 필요한 현실적인 이동성 모델을 구축하기 위해, 기존 센서 기반 데이터의 한계를 극복하고 공개 웹캠이라는 저비용·고밀도 데이터 소스를 활용한 점이 가장 큰 혁신이다. 데이터 수집 단계에서는 10개 도시(북미, 유럽, 아시아, 호주)의 교통 관제 웹캠을 자동 크롤러로 주기적으로 다운로드했으며, 카메라당 이미지 촬영 간격은 20 초에서 60 초까지 다양했다. 총 2,700대 이상의 카메라에서 45일 이상에 걸쳐 125 백만 장의 이미지를 확보, 7.5 TB라는 규모는 기존 차량 흐름 데이터셋(예: GPS 트레이스, 루프 검출기)보다 몇 배 큰 규모이다.
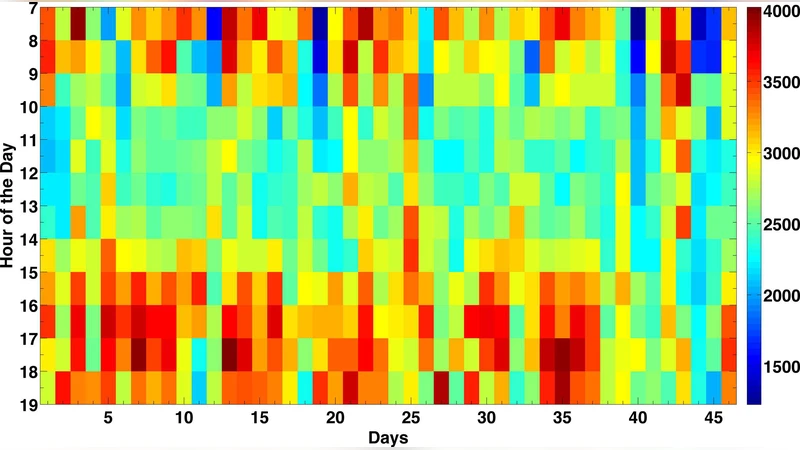
알고리즘은 시간적 이동 평균을 이용한 저역통과(high‑pass) 필터링으로 정적인 배경(도로·건물)을 추정하고, 각 프레임에서 이를 차감한다. 차감 후 남은 픽셀 중 사전 정의된 임계값을 초과하는 ‘활성 픽셀’의 비율을 교통 밀도로 정의함으로써, 복잡한 객체 검출·추적 과정을 회피하고 연산량을 크게 절감한다. 이 방식은 특히 혼잡 상황에서 차량 경계가 모호해지는 문제를 완화하고, 차량 길이·형태에 관계없이 도로 점유율을 정량화한다는 장점이 있다.
통계 분석에서는 개별 카메라 시계열에 대해 4가지 후보 분포(Log‑Logistic, Gamma, Weibull, Exponential)를 KS‑test와 AIC 기반 모델 선택으로 평가했다. 결과적으로 4개 도시(Toronto 제외)에서 82 % 이상의 카메라가 Log‑Logistic 분포에, Toronto에서는 94 %가 Gamma 분포에 가장 잘 맞는 것으로 나타났다. 도시 전체 집계에서도 동일한 두 분포가 95 % 신뢰수준에서 귀무가설을 기각하지 못했다.
또한, Hurst 지수와 변동성 분석을 통해 장기 의존성(LRD)과 자기유사성(self‑similarity)이 다수 시계열에서 관측되었으며, 이는 전통적인 포아송·지수 도착 모델이 현실 교통 흐름을 충분히 설명하지 못한다는 중요한 시사점을 제공한다.
한계점으로는 조명 변화, 악천후, 카메라 고장 등으로 인한 노이즈가 완전히 제거되지 않았으며, 차량 종류·속도 정보를 제공하지 못한다는 점을 들 수 있다. 향후 연구에서는 딥러닝 기반 객체 검출과 결합해 정밀도·재현율을 높이고, 수집된 밀도 데이터를 V2V/V2I 프로토콜 시뮬레이션에 직접 적용하는 방안을 모색한다.
댓글 및 학술 토론
Loading comments...
의견 남기기