대형망원경 위상 측정을 위한 티아이 신호대잡음 비율 분석
초록
본 논문은 오프축형과 위상 이동형 두 종류의 텔레스코프‑인터페라머(TI)를 이용해 파동전면오차(WFE)를 실시간으로 측정하는 방법을 제시하고, 광자 잡음, 검출기 잡음, 스펙트럼 대역폭 및 별의 각크기 등 주요 파라미터가 측정 정확도에 미치는 영향을 정량적으로 분석한다. 특히 10 m 이상 대형망원경에서는 광자 잡음이 SNR을 제한하는 주요 요인임을 밝히며, 10 ~ 50 m 구경망원경 및 우주 기반 코로네그래프에 적용 가능한 동작 범위를 제시한다.
상세 분석
TI는 기존 AO 시스템에서 사용되는 전통적인 피라미드·샤크‑하트먼·곡률 센서와 달리, 망원경 자체를 위상 센서로 전환한다는 근본적인 아이디어에 기반한다. 오프축형 TI는 메인 구경과 작은 기준 구경을 축에서 일정 거리 B만큼 오프셋시켜 두고, 두 개의 파면이 초점면에서 간섭함으로써 공간 변조된 PSF를 만든다. 이 PSF를 푸리에 역변환하면 OTF가 얻어지며, OTF의 세 번째 항이 기준 구경과 메인 구경의 컨볼루션 형태로 WFE 정보를 담는다. 여기서 핵심 가정은 기준 구경의 면적 S_r이 메인 구경 S_R에 비해 충분히 작아(보통 1/10 이하) Bessel 함수 형태가 거의 디랙 델타에 가까워진다는 ‘디랙 근사’이다. 이 근사는 측정 해상도를 S_R/S_r의 제곱근 정도로 제한하지만, 동시에 신호 대비 잡음 비율을 결정하는 대비비 C = S_r/S_R을 크게 감소시킨다.
위상 이동형 TI는 기준 구경을 메인 구경 내부에 배치하고, 광축 방향으로 미세한 위상 이동 φ(0, π/2, π, 3π/2)를 가함으로써 네 개의 PSF를 순차적으로 측정한다. 네 개의 OTF를 선형 결합하면 역시 디랙 근사 하에 WFE를 직접 복원할 수 있다. 두 방식 모두 위상 랩핑 문제를 해결하기 위해 다중 파장 측정이나 전통적인 위상 언래핑 알고리즘을 병행한다.
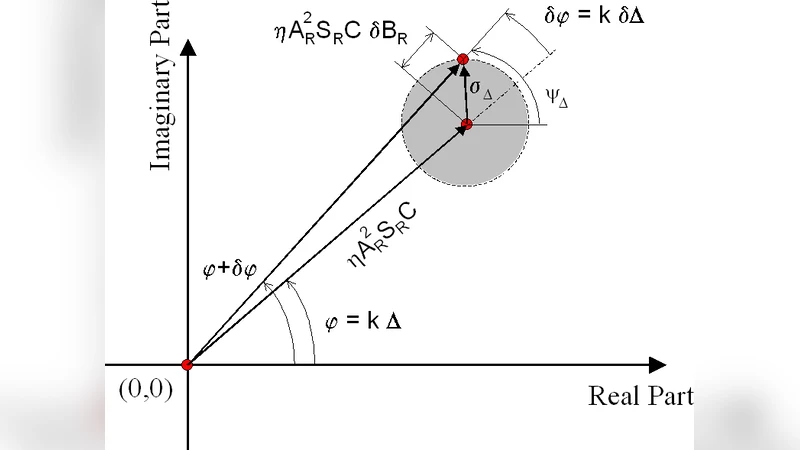
노이즈 분석에서는 복소수 형태의 신호 A_R² S_R C B_R(x,y) e^{ikΔ(x,y)}에 검출기 잡음(포톤 노이즈, 읽기 잡음, 다크 전류)과 시스템 효율 η를 곱한 형태로 모델링한다. 첫 번째 근사식(15)에서 잡음 성분 σ_Δ는 주로 포톤 노이즈에 의해 지배되며, 이는 C가 작을수록(즉, 기준 구경이 작을수록) 신호 전력이 급격히 감소함을 의미한다. 식(17)은 Δ의 최대 허용 오차를 C·S_A/(k R² η σ) 형태로 제시하며, 여기서 S_A는 기준 구경 면적, R은 메인 구경 반경이다. 따라서 대형망원경(구경 > 10 m)에서는 포톤 수가 충분히 많지 않으면 SNR이 급격히 떨어져 1/10 λ 수준의 정확도를 달성하기 어렵다.
시뮬레이션 결과는 유용 스펙트럼 대역폭이 넓어질수록(Δλ/λ ≈ 0.1) 포톤 수가 증가해 SNR이 개선되지만, 동시에 색분산에 의한 시스템 편향이 발생한다는 트레이드오프를 보여준다. 또한 관측 별의 각크기가 0.5 mas 이하일 때만 별이 점광원으로 간주되어 위상 정보가 정확히 복원될 수 있다. 실험적으로는 30 m 구경 ELT에서 m_V ≈ 8 등급 이하의 별을 대상으로 0.05 λ RMS 오차를 달성할 수 있음을 확인하였다.
우주 기반 코로네그래프에 적용할 경우 대기 난류가 없으므로 포톤 잡음이 유일한 제한 요인이 되며, 고해상도(≈ 10 cm) 기준 구경을 사용해 입력 WFE를 고밀도 샘플링할 수 있다. 다만, 우주 환경에서의 열 변동과 진동에 의한 기준 구경 위치 오차가 추가적인 시스템 편향을 유발할 수 있다.
종합하면, TI는 AO 실시간 제어에 필요한 빠른 연산 속도와 간단한 하드웨어 구현이 장점이지만, 대비비 C가 작아 포톤 잡음에 매우 민감하므로 구경이 큰 망원경에서는 별의 밝기와 관측 파장 대역을 신중히 선택해야 한다는 결론에 도달한다.
댓글 및 학술 토론
Loading comments...
의견 남기기