톱밥 전쟁 모델의 특성 다중 모터에 의한 화물 이동 분석
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
**
본 논문은 M.J.I. Müller 등(2008)이 제시한 ‘톱밥 전쟁(tug‑of‑war)’ 모델을 수학적으로 정밀 분석한다. 모델의 정상 상태(steady state)를 전부 구하고, 파라미터 조합에 따라 단일·이중·삼중 안정성(uni‑, bi‑, tristability)이 나타나는 조건을 도출한다. 초기 결합된 모터 수와 파라미터에 따라 화물의 속도와 이동 방향이 어떻게 바뀌는지를 예측할 수 있다.
**
상세 분석
**
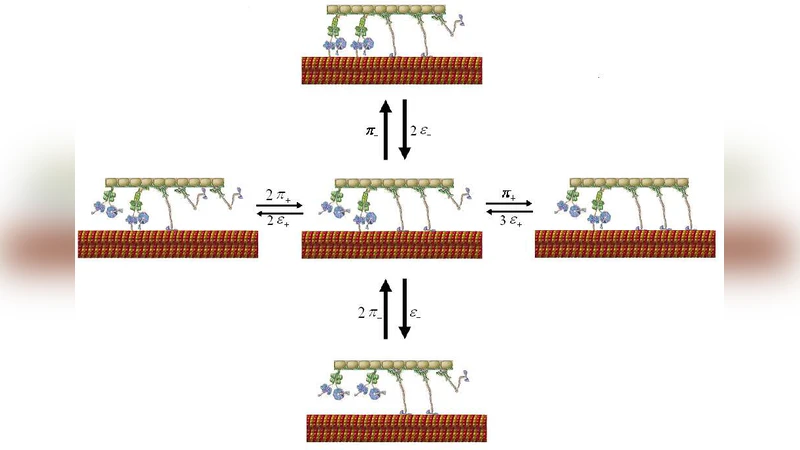
논문은 먼저 기존의 Monte Carlo 시뮬레이션 결과를 정량적 이론으로 전환하기 위해, 각각의 모터 종류(예: 키네신, 다이네인)를 ‘결합 상태’와 ‘해리 상태’로 구분하고, 결합된 모터 수를 정수 변수 (n_{+}, n_{-}) 로 나타낸다. 각 모터는 힘‑속도 관계 (v(F)=v_{0}(1-F/F_{s})) 와 결합/해리 전이율 (\pi(F),\ \epsilon(F)) 를 갖는다. 전체 시스템은 두 개의 마코프 연쇄(양쪽 모터 각각)와 그에 대응하는 확률 흐름 방정식으로 기술된다.
정상 상태는 (\dot n_{+}=0,\ \dot n_{-}=0) 인 점에서 찾으며, 이를 위해 두 변수에 대한 비선형 대수식 \
댓글 및 학술 토론
Loading comments...
의견 남기기