타이어 파열 제어를 위한 전자식 안정성 프로그램의 퍼지 제어 알고리즘
초록
본 논문은 기존 ESP와 동일한 센서·액추에이터를 활용하면서, 급격한 타이어 파열 상황에서도 차량의 진행 방향을 유지하도록 설계된 퍼지 로직 기반 개선형 ESP(IESP)를 제안한다. 차량 동역학 모델, 타이어‑노면 마찰 모델, 그리고 ABS와 연계된 퍼지 제어기를 통해 슬립각·요율 오류를 최소화하고, 브레이크·엔진 토크를 적절히 조절한다. 시뮬레이션 결과, IESP 적용 시 고속 코너링·직진 주행에서 타이어 파열로 인한 스핀을 방지하고, 경로 오차를 1 m 이하로 제한한다.
상세 분석
본 연구는 타이어 파열이라는 급격한 비정상 상황을 고려한 전자식 안정성 프로그램(ESP)의 한계를 인식하고, 퍼지 로직을 적용한 개선형 ESP(IESP)를 설계하였다. 먼저 차량의 6자유도 차체와 각 휠의 회전·서스펜션 자유도를 포함하는 라그랑주 기반 라그랑주 모델을 구축하고, 비선형 방정식을 수치 적분으로 해결한다. 타이어‑노면 접촉 모델은 정상 타이어와 저압 타이어를 각각 반경험적 µ_long·µ_transv 식과 압축된 원형 마찰 모델(식 2)로 구분하여, 슬립 비율 σ와 슬립각 α에 따른 마찰계수를 정밀히 재현한다.
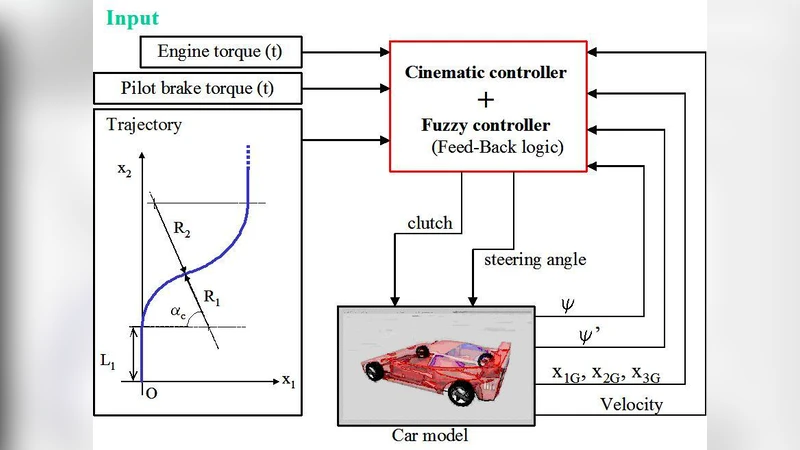
퍼지 제어기는 두 개의 서브 컨트롤러로 구성된다. 첫 번째는 요율 오류(PsidotErr)와 슬립각 오류(BetaErr)를 입력으로 받아 보정 요율 모멘트 ΔM_yaw를 출력한다. 입력 변수는 각각 5단계(‑B, ‑S, Z, S, B) 멤버십 함수를 갖고, 출력은 9단계로 세분화하여 미세 조정을 가능하게 한다. 두 번째는 ‘제한 초과량(Limit)’을 기반으로 엔진 토크 절감 비율을 결정한다. 여기서 Limit은 이론적 요율 한계 ψ_ref와 실제 요율 ψ′의 차이로 정의되며, 0~95% 구간을 4단계(N, S, M, B)로 나눈다.
ABS와의 연계는 브레이크 모듈레이터와 분배기로 구현된다. 모듈레이터는 페달 위치, IESP 출력, 휠 슬립 및 슬립율을 입력받아 각 휠에 적용할 제동력을 퍼지 방식으로 산출하고, 분배기는 차체의 종방향·횡방향 가속도를 이용해 휠별 수직 하중을 추정한다. 이를 통해 요율 모멘트를 전·후축에 비례적으로 배분하고, 필요 시 한쪽 휠에만 제동을 가해 요율을 조정한다.
시뮬레이션은 직선 주행·정지, 그리고 반경 50 m·100 m 코너링 상황에서 타이어가 3 s 내에 완전 파열되는 극단적인 조건을 가정하였다. 파열 전·후의 µ_long·µ_transv 값을 0.8에서 0.05까지 변화시켜 마찰 감소 정도를 다양화하였다. 결과는 IESP 비활성 시 슬립각 β가 700°까지 급증해 두 차례 스핀을 일으키는 반면, IESP 활성화 시 β는 2.5° 이하로 억제되고, 경로 오차는 최대 0.8 m에 머물렀다. 특히 전방 타이어 파열 시 차선 이탈은 감소했으며, 후방 타이어 파열 시 250 km/h 이하 속도에서는 스핀을 완전히 방지했다.
이러한 설계는 기존 ESP가 전제하는 ‘정상적인 마찰 조건’에 얽매이지 않고, 급격한 마찰 손실 상황에서도 실시간으로 요율·슬립을 보정함으로써 차량의 동적 안정성을 유지한다는 점에서 의미가 크다. 또한 퍼지 로직을 이용해 비선형·불확실한 현상을 부드럽게 다루면서도, ABS와의 통합을 통해 제동 효율을 손상시키지 않는다. 다만, 실제 차량 적용을 위해서는 타이어 파열 감지 센서와 실시간 µ_long·µ_transv 추정 알고리즘이 추가로 필요하며, 하드웨어 구현 시 연산 지연과 센서 노이즈에 대한 내성이 검증돼야 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기