유럽 영구 GPS 네트워크 좌표의 새로운 결합 솔루션
초록
본 논문은 1997년 4월부터 2004년 12월까지의 GPS 주간 데이터를 이용해, 개별 분석센터(AC)의 제약을 해제하고 ITRF2000에 정렬한 뒤 Helmert 블로킹 기법으로 결합한 유럽 영구 네트워크(EPN) 좌표 시계열을 제공한다. 새로운 결합 결과는 기존 EUREF 주간 결합과 비교해 변환 파라미터의 안정성이 향상되었으며, SINEX 형식으로 공개된다.
상세 분석
이 연구는 EPN 네트워크의 좌표 정밀성을 높이기 위해 세 단계의 절차를 체계적으로 적용하였다. 첫 번째 단계에서는 각 AC가 제공한 SINEX 파일에 포함된 사전 정보(좌표와 공분산)를 이용해, 기존에 강하게 고정된 기준점(피듈리얼 스테이션)의 제약을 수학적으로 제거하였다. 이는 Brockmann(1996)의 제약 해제 공식(식 3·4)을 그대로 적용함으로써, ‘자유 해’와 그 공분산을 재구성하는 과정이다. 제약 해제 후에도 일부 스테이션에 대해 매우 큰 공분산값(≈10⁴)을 부여해 사실상 느슨한 제약을 유지함으로써, 해의 수치적 안정성을 확보하였다.
두 번째 단계에서는 자유 해를 ITRF2000에 정렬하였다. 여기서는 7-파라미터 Helmert 변환을 사용했으며, 변환 파라미터 추정에 사용된 스테이션은 ITRF2000에 좌표·속도가 충분히 정확히 알려진 18개를 제외한 나머지 180여 개였다. 가중치는 각 스테이션의 좌표 오차와 ITRF2000의 전파 오차를 고려해 역가중치 형태로 적용했으며, 변환 후 잔차가 3 cm를 초과하는 스테이션은 반복적으로 제외하였다. 이 과정은 개별 AC 해가 동일한 전역 좌표계에 일관되게 매핑되도록 보장한다.
세 번째 단계는 Helmert 블로킹 기법을 통한 결합이다. 각 주간에 대해 개별 해의 정규 방정식(역공분산 행렬)을 단순히 합산함으로써 전체 네트워크의 결합 해를 도출하였다. 여기서는 관측 독립성을 가정했지만, 실제로는 동일한 GNSS 관측을 공유하므로 완전한 독립성은 없으며, 이는 향후 공분산 상관관계 추정으로 보완될 필요가 있다. 결합 전에는 각 해의 평균 형식 좌표 오차를 동일하게 맞추기 위해 스케일링을 수행했으며, 가중치는 동일하게 두어(동일 가중치) 결합의 복잡성을 최소화하였다. 이상치 검출은 결합 해와 개별 해 사이의 차이를 3σ 기준으로 판단해, 한 주당 최대 6개의 스테이션을 제외하였다.
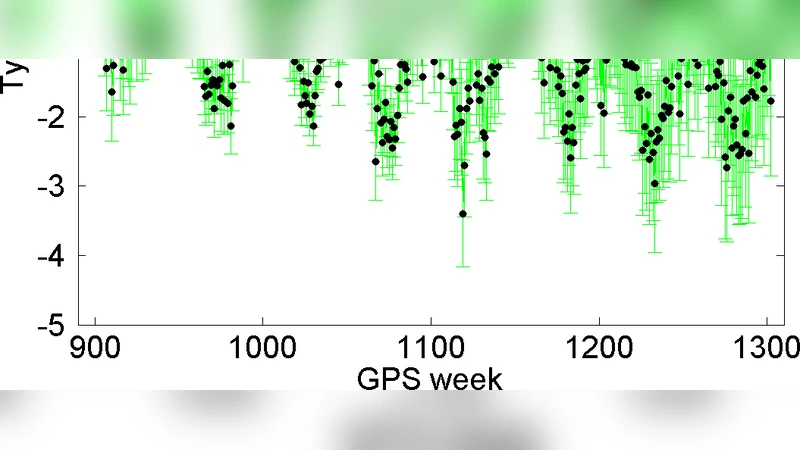
결과 분석에서는 새로운 결합 해와 기존 EUREF 주간 결합 해를 모두 ITRF2000에 정렬한 변환 파라미터 시계열을 비교하였다. 기존 EUREF 해는 피듈리얼 접근 방식으로 인해 변환 파라미터에 계절성 변동과 2002년(주 1143) ITRF97→ITRF2000 전환 시점에 뚜렷한 점프가 관찰되었다. 반면, 새로운 결합 해는 이러한 점프와 계절 변동이 크게 감소했으며, 변환 파라미터가 거의 0에 가깝게 유지되어 프레임 정합성이 향상된 것을 확인하였다. 다만, 일부 파라미터는 여전히 작은 시스템 편향과 계절성을 보였는데, 이는 ITRF2000에 정렬할 때 사용된 스테이션 중 불안정한 스테이션이 포함되었기 때문으로 해석된다. 또한, 변환 파라미터 간 강한 상관관계(Ty–Rx, Tz–Ry 등)는 EPN 네트워크가 상대적으로 작은 지역에 집중돼 있기 때문에 발생하며, 이는 파라미터 해석에 제한을 둔다.
결론적으로, 제약을 해제하고 최소 제약(minimal constraints) 방식으로 ITRF2000에 정렬한 후 Helmert 블로킹으로 결합한 새로운 EPN 좌표 시계열은 기존 솔루션보다 프레임 일관성과 좌표 안정성이 뛰어나며, SINEX 형식으로 공개되어 향후 지오다이나믹 연구에 바로 활용 가능하다. 향후 ITRF2004 등 최신 프레임으로 재정렬하거나, 관측 상관관계를 반영한 가중치 최적화가 이루어지면 더욱 정밀한 결과를 기대할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기