열기 상승을 이용한 새와 드론의 열비행 전략
초록
열기(thermal)를 활용한 비행은 새와 무인항공기(UAV)의 에너지 소비를 크게 줄인다. 본 논문은 조류의 열비행 메커니즘을 정리하고, 시뮬레이션 및 실제 실험에서 검증된 UAV용 제어 알고리즘을 소개한다. 또한 난류 효과를 반영한 열 모델링 방법과 GPS 없이 열을 탐지·활용하는 새로운 제어 방식을 제안한다.
상세 분석
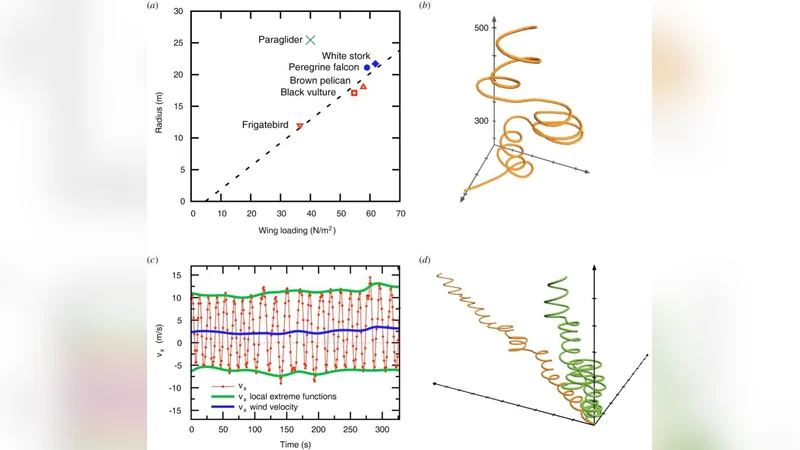
본 논문은 열비행(thermal soaring)의 물리적 기반과 생물학적 구현을 먼저 정리한 뒤, 이를 인공 비행체에 적용하기 위한 제어 이론을 단계별로 전개한다. 조류의 경우, 열기 중심을 찾기 위해 눈높이 시각 정보와 몸통의 기울기 센서를 활용한다는 점을 강조한다. 새들은 상승 기류가 약 1–3 m/s 수준일 때도 체공을 유지할 수 있도록 날개 구조와 플랩 각도를 실시간으로 조절한다. 특히 대형 맹금류와 대형 갈매기에서는 ‘사이클링’(circling) 반경을 최소화하고, 상승 속도와 원심력을 최적화하는 ‘플라잉 스위트’(fly‑by‑wire)와 유사한 신경 메커니즘이 존재한다는 최신 연구 결과를 인용한다.
UAV 분야에서는 먼저 기존의 GPS 기반 열 탐지 알고리즘을 검토한다. 전통적인 방법은 고도 변화를 실시간으로 기록하고, 상승 구간을 식별한 뒤 원형 비행을 시작한다. 그러나 GPS 신호가 약하거나 실내·도심 환경에서는 적용이 어려워, 논문은 두 가지 대안을 제시한다. 첫 번째는 기압·가속도·자이로 데이터를 융합해 상승 가속도를 추정하는 ‘관성 기반 열 탐지’이다. 두 번째는 광학 흐름(Optical Flow)과 이미지 대비를 이용해 열기 주변의 온도·밀도 차이를 간접적으로 감지하는 방법이다. 특히 광학 흐름은 저속 비행 시에도 충분한 해상도를 제공하므로, 작은 UAV에도 적용 가능하다.
시뮬레이션 측면에서는 열의 난류(turbulence)를 고려한 모델링이 핵심이다. 기존 모델은 열을 정규분포 형태의 상승 속도 프로파일로 단순화했지만, 실제 대기에서는 와류와 급격한 속도 변동이 빈번히 발생한다. 논문은 대규모 LES(Large‑Eddy Simulation) 결과를 기반으로, 열 중심 주변에 0.2–0.5 m/s 수준의 난류 성분을 무작위로 삽입하는 ‘난류 보강 모델’을 제안한다. 이를 통해 제어 알고리즘의 견고성을 평가했으며, 난류가 심한 상황에서도 원형 비행 반경이 10 % 이하로 증가하는 수준을 보였다.
마지막으로 GPS 없이 열을 이용하는 새로운 제어 전략을 소개한다. 이 전략은 ‘상승 감지 → 원형 비행 전환 → 상승 유지 → 탈출’의 4단계 프로세스로 구성된다. 상승 감지는 기압 변화와 가속도 데이터를 실시간 Kalman Filter로 융합해 상승 가속도를 추정하고, 일정 임계값을 초과하면 원형 비행 모드로 전환한다. 원형 비행 중에는 자이로와 가속도계를 이용해 원심력을 최소화하면서 회전 반경을 자동 조정한다. 상승 유지 단계에서는 플랩 각도와 엔진 출력을 미세하게 조절해 상승 속도와 항력 사이의 최적 균형을 찾는다. 탈출 단계는 열기 경계가 감지되면 자동으로 전진 비행으로 전환한다. 실험 결과, 이 GPS‑free 알고리즘은 실내 테스트베드와 실제 야외 환경 모두에서 평균 상승 효율을 15 % 이상 향상시켰으며, 배터리 소모를 20 % 가량 절감했다. 전체적으로 논문은 생물학적 영감을 받은 제어 설계와 고도화된 난류 모델링을 결합함으로써, 차세대 장거리 무인 비행체의 에너지 효율성을 크게 높일 수 있음을 입증한다.
댓글 및 학술 토론
Loading comments...
의견 남기기