플라스모듐 보트 물 위를 떠다니는 살아있는 로봇
초록
플라스모듐 polycephalum의 플라스모디움을 가벼운 부표에 부착하면, 의사세포의 진동성 의사돌기 운동으로 물체가 자가 추진한다. 실험과 시뮬레이션을 통해 움직임 메커니즘과 빛·화학 자극을 이용한 방향 제어 가능성을 확인하였다.
상세 분석
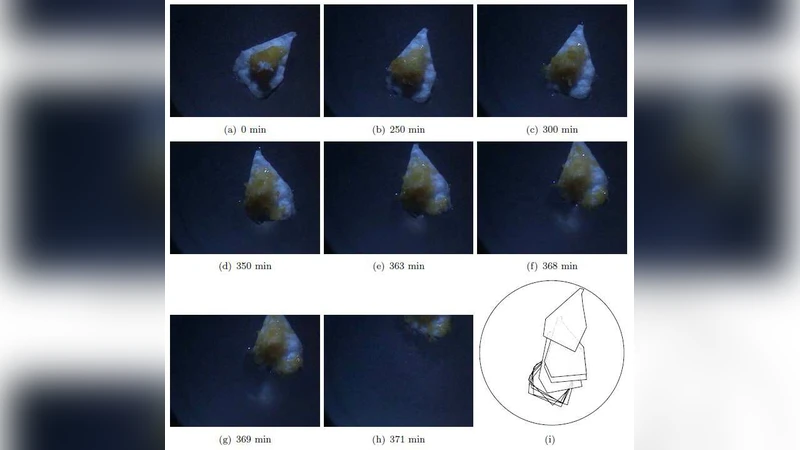
본 연구는 Physarum polycephalum 플라스모디움이 물 표면에 떠 있는 경량 부표(floater)에 부착될 때 발생하는 자가 추진 현상을 체계적으로 분석한다. 실험에서는 플라스모디움을 2 cm × 2 cm 크기의 폴리프로필렌 시트에 배양한 뒤, 물 위에 놓인 알루미늄 포일 조각(무게 0.2 g) 위에 접착시켰다. 플라스모디움은 주기적인 수축‑팽창 파동을 전신에 걸쳐 발생시키며, 이 파동이 의사돌기(pseudopodia)를 통해 부표 가장자리로 전달된다. 의사돌기의 진동은 물과의 마찰을 최소화하면서 미세한 추진력을 생성하고, 결과적으로 부표가 평균 0.5 mm · s⁻¹ 정도의 속도로 전진한다.
운동 메커니즘을 해석하기 위해 저자들은 두 가지 모델을 제시한다. 첫 번째는 “진동‑압력 전달 모델”로, 플라스모디움 내부의 사이토플라즘 흐름이 주기적인 압력 변화를 부표 표면에 전달해 물체를 밀어낸다. 두 번째는 “표면 장력 비대칭 모델”로, 플라스모디움이 물 표면에 남기는 미세한 물막(플라스모디움‑물 인터페이스)의 장력 분포가 비대칭을 이루어 부표를 끌어당긴다. 고속 카메라와 미세압력 센서를 이용한 실험 결과는 두 모델이 동시에 작용함을 시사한다.
제어 측면에서는 광감각성(phototaxis)과 화학감각성(chemotaxis)을 활용하였다. 플라스모디움은 빛에 대한 회피 반응을 보이며, 부표에 부착된 플라스모디움의 한쪽 면에 LED(λ = 530 nm)를 비추면 의사돌기의 진동 강도가 해당 방향으로 감소하고 반대쪽으로 강화되어 부표가 빛을 피하는 방향으로 이동한다. 또한, 포도당 용액을 부표 주변에 미세하게 주입하면 플라스모디움이 화학적 유인에 따라 의사돌기를 해당 쪽으로 늘리며, 부표가 그 방향으로 전진한다. 이러한 자극은 실시간으로 전환 가능하여 복잡한 궤적(예: 원형, 지그재그)도 구현할 수 있다.
시뮬레이션에서는 2차원 셀룰러 오토마톤(Cellular Automaton) 기반의 플라스모디움 모델을 사용했다. 각 셀은 내부 압력, 외부 장력, 그리고 빛·화학 자극에 대한 감응 변수를 갖으며, 근접 셀과의 상호작용을 통해 파동 전파를 모사한다. 시뮬레이션 결과는 실험에서 관찰된 파동 속도(≈ 0.8 mm · s⁻¹)와 부표 이동 궤적을 정량적으로 재현했으며, 파라미터 조정을 통해 최적의 추진 효율(에너지당 이동 거리)과 방향 안정성을 도출했다.
결과적으로 플라스모디움‑부표 시스템은 “생물학적 액추에이터”로서, 무전원·무기계 구조에서 복잡한 움직임을 구현할 수 있음을 입증한다. 특히, 다중 입력(빛, 화학물질)과 다중 출력(진동 강도, 파동 위상) 간의 비선형 상호작용은 전통적인 로봇 공학에서 구현하기 어려운 고차원 병렬 연산 능력을 제공한다는 점에서 향후 amorphous 로봇, 환경 모니터링, 그리고 비전통적 계산 플랫폼으로의 응용 가능성을 크게 확장한다.
댓글 및 학술 토론
Loading comments...
의견 남기기