이미지 구조를 모델링하는 위상 결합 볼츠만 머신
초록
본 논문은 자연 이미지의 지역 진폭과 위상 통계 구조를 포착하기 위해, 제3차원 인자화 볼츠만 머신을 $L_2$-구형 서브스페이스에 적용하고, 위상 결합을 모델링하는 추가 은닉 유닛을 도입한 새로운 프레임워크를 제시한다. 학습 결과는 사분위 쌍 가보르 필터와 유사한 서브스페이스와, 위상 차와 합에 집중된 결합 분포를 보여준다.
상세 분석
이 연구는 이미지 통계 모델링 분야에서 두 가지 핵심적인 진보를 제공한다. 첫 번째는 기존의 제3차원 인자화 볼츠만 머신(FACTORIZED THIRD‑ORDER BOLTZMANN MACHINE, F3BM)을 $L_p$-구형 서브스페이스, 특히 $L_2$-노름을 갖는 2차원 서브스페이스에 일반화한 점이다. 이 확장은 필터 출력의 제곱값(즉, 에너지)뿐 아니라 해당 서브스페이스 내에서의 진폭(노름)과 위상(각도) 정보를 동시에 다룰 수 있게 한다. 기존 모델이 진폭에 대한 고차 상관관계만을 포착했다면, 여기서는 진폭과 위상이 서로 얽힌 복합적인 구조를 학습한다는 점에서 의미가 크다.
두 번째 진보는 위상 결합을 명시적으로 모델링하는 은닉 유닛의 도입이다. 저자들은 각 서브스페이스의 위상을 독립적인 변수로 간주하고, 은닉 유닛이 위상 쌍의 합과 차에 대한 확률분포를 혼합하는 방식으로 위상 의존성을 학습한다. 이때 사용되는 결합 분포는 ‘위상 결합 분포(phase‑coupling distribution)’라 불리며, 특정 위상 관계(예: 0도 혹은 180도 차이)가 자주 나타나는 자연 이미지의 특성을 반영한다. 은닉 유닛이 여러 개 존재함에 따라 모델은 다양한 위상 패턴을 조합적으로 표현할 수 있게 되며, 이는 기존의 독립적인 위상 가정보다 훨씬 풍부한 표현력을 제공한다.
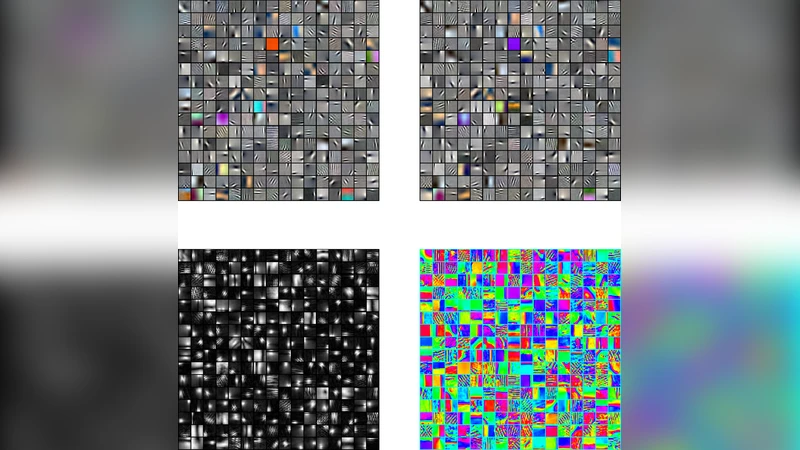
실험적으로 자연 이미지 데이터셋에 대해 학습시킨 결과, 모델이 발견한 서브스페이스는 거의 완벽에 가까운 쿼드러처 페어 가보르 필터 형태를 띤다. 이는 인간 시각 시스템이 초기에 수행하는 방향·주파수 선택 필터와 일치한다는 점에서 생물학적 타당성도 확인된다. 또한 위상 결합 은닉 유닛은 이미지 내 에지·코너와 같은 구조적 요소가 발생하는 위치에서 위상 차이가 일정한 패턴을 보이는 것을 포착한다. 이러한 결과는 자연 이미지가 단순히 진폭의 고차 통계만이 아니라, 위상 간의 복잡한 상호작용을 통해 구조를 형성한다는 기존 가설을 실증적으로 뒷받침한다.
전체적으로 이 논문은 이미지 통계 모델링에 있어 ‘진폭‑위상’이라는 두 축을 동시에 고려함으로써, 기존 모델이 놓쳤던 고차 위상 의존성을 효과적으로 학습한다는 점에서 큰 의미를 가진다. 또한 인자화된 고차 볼츠만 머신과 위상 결합 은닉 유닛이라는 두 가지 설계가 서로 보완적으로 작용해, 자연 이미지의 구조적 특성을 보다 정밀하게 기술한다는 점에서 향후 컴퓨터 비전, 신경과학, 이미지 압축 등 다양한 응용 분야에 파급 효과를 기대할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기