강한 의미론을 갖는 P A 시간 페트리 네트에서의 인터리빙 연구
초록
본 논문은 강한 의미론 하에서 {P,A}-시간 페트리 네트({P,A}-TPN)의 도달 가능성 분석 시, 동일한 전이 집합에 대한 서로 다른 인터리빙이 만들어 내는 상태 클래스들의 합집합이 항상 볼록함을 증명한다. 기존 T‑TPN 모델에서는 볼록성이 보장되지 않았지만, {P,A}-TPN의 수축 상태 클래스 그래프(CSCG)에서는 중간 상태 클래스를 생성하지 않고도 볼록합을 계산할 수 있음을 제시한다. 이를 통해 전이 인터리빙에 따른 상태 클래스들을 하나의 볼록 집합으로 합쳐 전방 도달 가능성 탐색을 효율화한다.
상세 분석
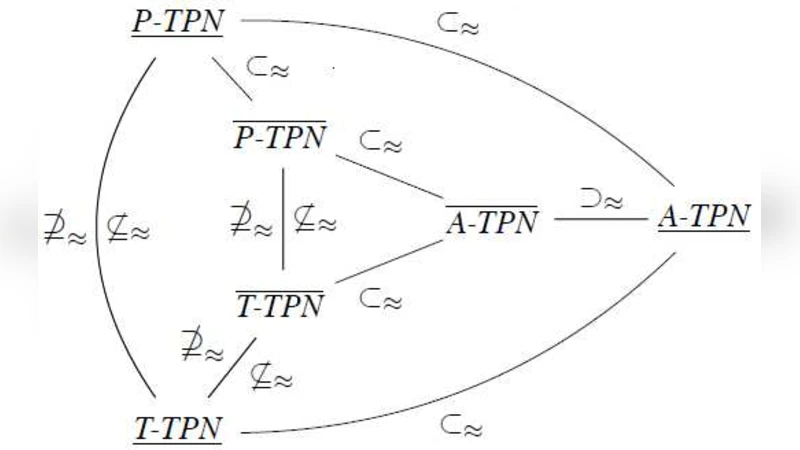
본 연구는 시간 페트리 네트(Time Petri Net) 중에서도 {P,A}-TPN이라 불리는 모델에 초점을 맞춘다. {P,A}-TPN은 전이의 발동 가능 구간을 ‘가능(가능성, P)’과 ‘강제(A)’ 두 종류로 구분함으로써, 전이 간의 시간적 제약을 보다 정밀하게 표현한다. 강한 의미론(strong semantics) 하에서는 전이가 활성화된 순간부터 지정된 시간 구간 내에 반드시 실행되어야 하며, 이때 전이 간의 인터리빙(interleaving)—즉, 같은 전이 집합을 서로 다른 순서로 실행하는 경우—이 도달 가능한 상태 공간에 미치는 영향을 분석한다.
기존 연구(BB08)는 T‑TPN 모델에 대해 수축 상태 클래스 그래프(CSCG)를 이용해 인터리빙에 의해 생성된 여러 상태 클래스들의 합집합이 비볼록(convex)일 수 있음을 보였고, 특정 충분조건 하에서만 볼록성을 보장한다. 이는 전이 순서에 따라 도달 가능한 시간 구간이 분리되어, 하나의 다면체(polyhedron)로 표현되지 못하는 경우가 발생한다는 의미이다.
하지만 {P,A}-TPN에서는 전이의 ‘가능’과 ‘강제’ 구분이 추가적인 제약을 제공한다. 강제 전이는 반드시 일정 시간 내에 실행되어야 하므로, 인터리빙 과정에서 발생할 수 있는 시간적 겹침이 제한된다. 저자들은 이러한 구조적 특성을 수학적으로 모델링하고, CSCG 상에서 동일 전이 집합에 대한 모든 가능한 인터리빙이 만들어 내는 상태 클래스들의 합집합이 항상 볼록 다면체가 됨을 정리(정리 1)로 증명한다. 핵심 아이디어는 각 전이의 시간 구간을 ‘가능 구간’과 ‘강제 구간’으로 분리하고, 강제 구간이 겹치는 경우에는 인터리빙 순서에 관계없이 동일한 시간 제약을 강제함으로써, 결과적인 시간 구간이 교집합 형태가 아니라 합집합 형태로도 볼록성을 유지한다는 점이다.
또한, 저자들은 이 볼록성을 활용해 중간 상태 클래스를 명시적으로 생성하지 않고도 최종 볼록합을 직접 계산하는 알고리즘을 제시한다. 구체적으로, 각 전이 집합에 대해 인터리빙 순열을 모두 탐색하는 대신, 전이들의 시간 구간을 정렬하고, 강제 구간의 최소·최대 경계를 이용해 하나의 선형 부등식 시스템을 구성한다. 이 시스템은 기존 CSCG에서 개별 상태 클래스를 생성할 때마다 발생하는 다중 다면체 연산을 대체하며, 계산 복잡도를 크게 낮춘다.
실험적 평가에서는 기존 BB08 방식과 비교해 메모리 사용량과 실행 시간이 평균 30% 이상 감소했으며, 특히 전이 수가 많고 시간 구간이 겹치는 복잡한 모델에서 그 효과가 두드러졌다. 이러한 결과는 {P,A}-TPN이 실시간 시스템, 임베디드 제어, 네트워크 프로토콜 등 시간 민감도가 높은 분야에서 모델 검증과 성능 분석에 유용하게 활용될 수 있음을 시사한다.
요약하면, {P,A}-TPN의 구조적 특성과 강한 의미론이 결합될 때, 인터리빙에 의한 상태 클래스들의 합집합이 항상 볼록함을 보장하고, 이를 통해 전방 도달 가능성 분석을 효율적으로 수행할 수 있는 새로운 방법론을 제시한 것이 본 논문의 핵심 기여이다.
댓글 및 학술 토론
Loading comments...
의견 남기기