비동기화 가능한 폐루프 시스템 이론
초록
본 논문은 감독 제어 이론에서 가정되는 동기식 상호작용과 실제 구현에서 발생하는 비동기식 상호작용 사이의 격차, 즉 ‘부정확 동기화 문제’를 해결한다. 프로세스 대수적 틀을 이용해 동기식 폐루프 시스템에 통신 매개체를 삽입해 비동기식 폐루프 시스템을 구성하고, 두 시스템이 분기 동형(branching bisimilar)임을 보장하는 충분조건을 제시한다.
상세 분석
감독 제어 이론은 전통적으로 플랜트와 컨트롤러가 완전한 동기화 하에 동작한다는 전제하에 자동 합성 방법을 제공한다. 그러나 실제 산업 현장에서는 센서·액추에이터 간의 전송 지연, 버퍼링, 비동기 이벤트 처리 등으로 인해 완전 동기화가 불가능하고, 이로 인해 ‘inexact synchronisation’이라 불리는 현상이 발생한다. 이러한 현상은 합성된 감독기가 기대한 행동을 보장하지 못하게 하여 안전·성능 보증에 심각한 위협을 가한다.
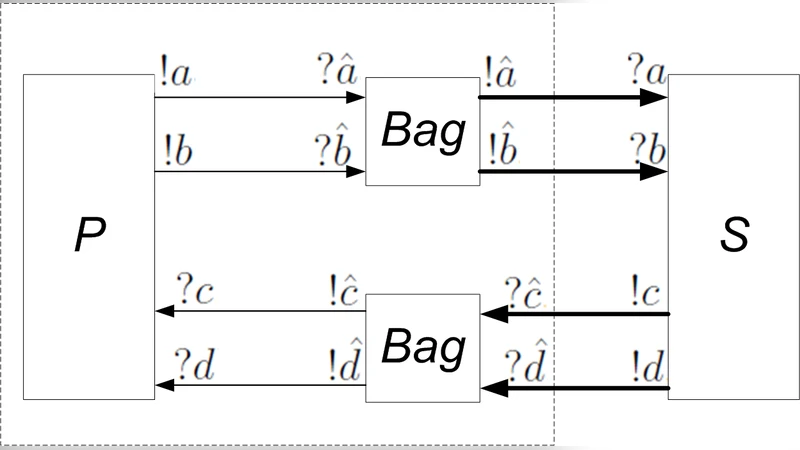
논문은 이 문제를 프로세스 대수(특히 CCS/π‑calculus 기반)의 정형적 모델링을 통해 접근한다. 먼저 기존의 동기식 폐루프 시스템을 정의하고, 이를 ‘통신 매개체(communication medium)’라는 중간 프로세스를 삽입해 비동기식 형태로 변환한다. 매개체는 입력 채널과 출력 채널 사이에 FIFO 버퍼를 두어 실제 물리적 전송 지연을 모델링한다. 핵심은 이 변환이 시스템의 관찰 가능한 행동을 보존하는가이다.
이를 검증하기 위해 논문은 ‘분기 동형(branching bisimulation)’이라는 강력한 행동 동등성 개념을 채택한다. 분기 동형은 내부 τ‑전이(숨은 행동)를 허용하면서도 외부 관찰 가능한 전이들의 구조를 유지한다. 저자는 두 시스템이 분기 동형임을 보이기 위한 충분조건을 네 가지로 정리한다. 첫째, 플랜트와 컨트롤러 모두 결정적(deterministic)이어야 한다. 둘째, 모든 제어 명령은 ‘이벤트‑핸들링’ 규칙에 따라 즉시 처리될 수 있는 형태여야 하며, 지연이 발생하지 않도록 설계돼야 한다. 셋째, 통신 매개체의 버퍼 용량은 무한대가 아니라 제한된 크기이지만, 버퍼 오버플로우가 발생하지 않도록 시스템이 ‘non‑blocking’ 특성을 가져야 한다. 넷째, 시스템 전체가 ‘deadlock‑free’이며, 각 상태에서 가능한 모든 외부 이벤트에 대해 적절한 응답이 존재해야 한다.
이러한 조건 하에서 저자는 동기식 폐루프와 비동기식 폐루프 사이에 분기 동형 관계가 성립함을 정리와 증명을 통해 보여준다. 특히, 매개체의 내부 τ‑전이가 외부 관찰에 영향을 주지 않도록, 각 τ‑전이가 ‘silent move’로 간주될 수 있음을 보이며, 이는 기존의 동기식 모델과 동일한 관찰 가능 행동 집합을 유지한다는 의미다.
또한 논문은 사례 연구로 간단한 제조 라인 모델을 제시한다. 여기서 플랜트는 작업 순서와 자원 제한을, 컨트롤러는 안전 규칙(예: 두 작업이 동시에 진행되지 않음)을 담당한다. 동기식 설계와 비동기식 설계를 각각 구현한 뒤, 모델 검증 도구(FDR, CADP 등)를 이용해 분기 동형 여부를 자동 검사한다. 결과는 제시된 충분조건을 만족할 경우 두 모델이 완전히 동등함을 확인시켜준다.
마지막으로 저자는 이 이론이 실제 임베디드 시스템 설계에 적용될 가능성을 논의한다. 특히, 실시간 운영체제(RTOS) 위에서 실행되는 제어 소프트웨어는 본질적으로 비동기식 메시지 패싱을 사용하므로, 본 연구의 결과를 활용하면 설계 단계에서부터 ‘동기식 합성 결과’를 그대로 비동기식 구현에 매핑할 수 있다. 이는 검증 비용 절감과 설계-구현 간 격차 해소에 크게 기여할 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기