면역 시스템 영감을 받은 분산 시스템 설계 전략
초록
본 논문은 자연 면역 시스템(NIS)의 림프절 구조가 신체 크기에 따라 림프절 수와 크기가 서브선형적으로 증가하는 ‘하이브리드 서브모듈러’ 아키텍처가 로컬 탐지와 글로벌 항체 생산 사이의 통신·이동 비용을 최적화한다는 가설을 제시한다. 이러한 원리를 인공 면역 시스템(AIS) 및 로봇 군집 제어와 같은 자원·공간 제약이 큰 분산 시스템에 적용하여, 네트워크 규모에 따라 최적의 모듈화 수준을 선택하도록 제안한다.
상세 분석
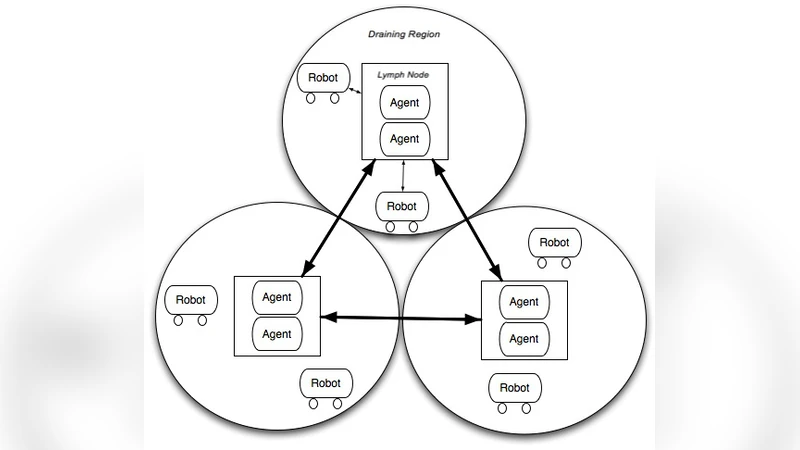
논문은 먼저 자연 면역 시스템이 신체 전체에 퍼진 드문 항원‑특이적 세포들을 이용해 ‘바늘 찾기’ 문제를 해결한다는 점을 강조한다. 림프절(LN)은 드레인 영역(DR)에서 수집된 항원을 T·B 세포에게 제시하는 작은 로컬 공간으로, 전신에 걸친 탐지를 분산시킨다. 저자들은 ‘항원 탐지 시간’과 ‘항체 생산 시간’이 신체 크기에 거의 독립적이라는 실험 데이터를 바탕으로, 이러한 규모 불변성을 설명하기 위해 세 가지 림프절 조직 모델을 제시한다.
-
완전 모듈형 모델(모델 1) – 림프절 수는 선형적으로 증가하지만 각 림프절의 크기는 일정하게 유지된다. 이는 로컬 통신(DC→LN) 비용을 최소화하지만, 전신적인 B 세포 모집을 위해 많은 림프절 간 이동이 필요해 글로벌 통신 비용이 급증한다.
-
비모듈형 모델(모델 2) – 림프절 수는 일정하고 크기만 증가한다. 큰 림프절은 더 많은 IS 세포를 포함해 글로벌 모집 비용을 낮추지만, DR이 커지면서 DC가 림프절에 도달하는 데 걸리는 로컬 지연이 늘어난다.
-
하이브리드 서브모듈러 모델(모델 3) – 림프절 수와 크기가 모두 신체 규모에 따라 서브선형적으로 증가한다. 이 모델은 로컬 탐지와 글로벌 항체 생산 사이의 트레이드오프를 균형 있게 조절한다. 실제 동물 데이터(림프절 크기와 수)와 일치하며, 항원 탐지와 항체 생산 시간이 신체 크기에 독립적인 현상을 설명한다.
이후 저자들은 위 모델을 인공 면역 시스템(AIS) 및 분산 로봇 제어에 매핑한다. 로봇은 DC, 서버는 LN, 규칙 집합은 항체에 해당한다. 네트워크에서 두 가지 주요 병목(로봇↔서버, 서버↔서버)과 네 가지 자원 제약 시나리오(무제한/제한 조합)를 고려해 최적 아키텍처를 선택한다. 로봇 대역폭만 제한된 경우는 모델 1, 서버 대역폭만 제한된 경우는 모델 2, 양쪽 모두 제한된 경우는 모델 3이 최적이다. 이는 실제 시스템 설계 시 물리적 공간과 통신 자원을 어떻게 배분해야 하는지를 구체적으로 제시한다.
결론적으로, 자연 면역 시스템이 보여주는 서브모듈러 구조는 ‘검색(로컬) vs. 응답(글로벌)’ 트레이드오프를 최소화하는 효율적인 설계 원칙이며, 이는 대규모 센서 네트워크, 모바일 애드혹 네트워크, 다중 로봇 협업 등 다양한 분산 시스템에 적용 가능하다.
댓글 및 학술 토론
Loading comments...
의견 남기기