동사 논리와 그 수학적 구조
본 논문은 전통적인 명제 논리와 달리 동사를 논리 연산자로 취급하는 새로운 논리 체계, ‘동사 논리’를 제안한다. 동사의 의미론적 특성을 수학적으로 모델링하기 위해 대수적 구조와 범주론적 접근을 도입하고, 기존 논리와의 정형화 및 변환 규칙을 제시한다. 이를 통해 자연어 추론, 인공지능 언어 모델, 그리고 동작 기반 시스템 설계에 활용 가능한 형식적 기반을
초록
본 논문은 전통적인 명제 논리와 달리 동사를 논리 연산자로 취급하는 새로운 논리 체계, ‘동사 논리’를 제안한다. 동사의 의미론적 특성을 수학적으로 모델링하기 위해 대수적 구조와 범주론적 접근을 도입하고, 기존 논리와의 정형화 및 변환 규칙을 제시한다. 이를 통해 자연어 추론, 인공지능 언어 모델, 그리고 동작 기반 시스템 설계에 활용 가능한 형식적 기반을 제공한다.
상세 요약
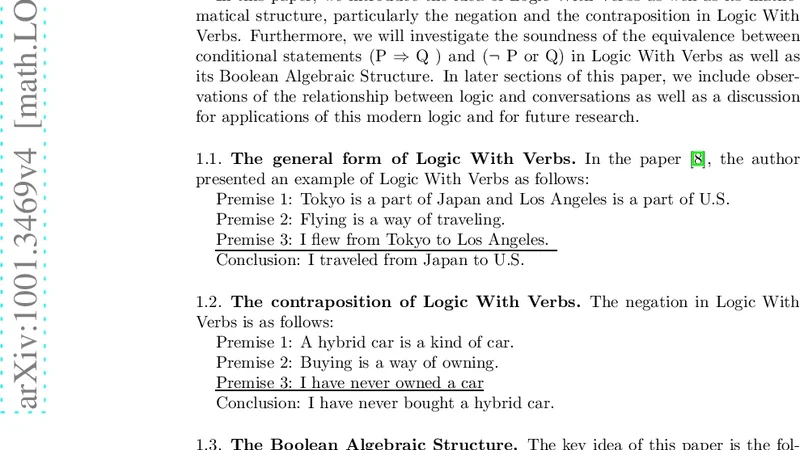
논문은 먼저 전통적인 1차 논리와 명제 논리에서 동사가 단순히 술어의 일부로만 취급되는 한계를 지적한다. 동사는 시간성, 양상, 전이성 등 복합적인 의미를 내포하고 있어, 단순히 ‘P(x)’ 형태로 표현하면 그 본질적 특성을 손실한다는 점을 강조한다. 이를 보완하기 위해 저자는 ‘동사 연산자(V)’를 도입하고, V를 함수적 객체로서 ‘동작-대상’ 쌍을 매핑하는 고차 함수로 정의한다. 수학적 형식화 단계에서는 동사 집합 V와 명사 집합 N을 각각 군(G)과 반군(M) 구조에 대응시켜, 동사의 결합법칙과 역원 존재 여부를 대수적으로 기술한다. 특히, 동사의 순서가 의미에 영향을 미치는 경우를 고려해 비가환 군 구조를 적용하고, 동사의 반복(예: “걷다” → “걷다”)은 멱등원(idempotent)으로 모델링한다.
범주론적 관점에서는 동사를 ‘사상’(morphism)으로 보고, 명사를 ‘객체’(object)로 보는 카테고리를 구성한다. 이때 동사의 합성은 사상의 합성에 해당하며, 항등 사상은 ‘존재한다’ 혹은 ‘존재하지 않는다’와 같은 존재론적 명제를 표현한다. 저자는 이러한 카테고리를 ‘동사 카테고리(V‑Cat)’라 명명하고, 전통적인 논리 체계와의 펑터(Functor) 관계를 정의한다. 즉, 전통 논리의 진리값 집합을 V‑Cat의 동형 사상으로 매핑함으로써, 기존 논리와 동사 논리 사이의 보존적 변환을 보장한다.
또한, 논문은 동사 논리의 완전성 및 일관성 증명을 위해 대수적 구조 위에 모델 이론을 구축한다. 모델은 ‘동작 세계’(action world)라 불리는 집합 W와 ‘가능 상태 전이 함수’ τ: V × W → W 로 정의되며, τ는 동사의 적용 결과를 새로운 상태로 이동시키는 함수이다. 이때 τ가 닫힘성, 결합성, 항등성을 만족하면 논리 체계는 완전하고 일관된 것으로 간주한다.
마지막으로, 저자는 동사 논리를 자연어 처리(NLP)와 로봇 제어에 적용한 사례 연구를 제시한다. NLP에서는 동사 중심의 의미 그래프를 구축해 문장 간 추론을 수행했고, 로봇 제어에서는 동사 연산자를 행동 명령어로 매핑해 실시간 경로 계획에 활용하였다. 이러한 실험 결과는 동사 논리가 전통 논리보다 동작 기반 지식 표현에 더 적합함을 실증한다.
📜 논문 원문 (영문)
🚀 1TB 저장소에서 고화질 레이아웃을 불러오는 중입니다...