Lyapunov 특성 지수와 계산 방법에 대한 종합적 고찰
본 논문은 동역학계의 Lyapunov 특성 지수(LCE)의 이론적 배경과 다양한 수치 계산 기법을 체계적으로 정리한다. 최대 LCE(mLCE)의 계산법, Benettin 등에 의해 제안된 표준 방법, QR·SVD 기반 연속·이산 알고리즘, 그리고 보존계와 비보존계, 시계열 데이터에 대한 적용까지 폭넓게 다룬다.
저자: Charalampos Skokos
본 논문은 Lyapunov 특성 지수(Lyapunov Characteristic Exponents, LCE)의 이론적 배경과 수치적 계산 방법을 포괄적으로 정리한 서베이 논문이다. 서론에서는 LCE가 동역학계의 궤도 안정성을 평가하는 핵심 지표이며, 최대 LCE(mLCE)가 양수이면 혼돈, 0이면 준주기 혹은 정칙 궤도임을 강조한다. 이어서 Oseledec(1968)의 곱셈적 에르고딕 정리(MET)를 상세히 설명한다. MET는 유한 차원 시스템에서 거의 모든 초기조건에 대해 LCE가 존재하고, 특이값 분해를 통해 LCE 스펙트럼을 정의한다는 중요한 결과를 제공한다.
2장에서는 보존계, 즉 자율 해밀토니안 시스템과 심플렉틱 맵을 대상으로 변분 방정식과 접선 사상의 수학적 형태를 제시한다. 연속형 시스템에서는 해밀토니안 H(q,p)으로부터 Hamilton 방정식을 유도하고, 변분 방정식은 야코비 행렬 J와 해밀토니안의 헤시안으로 구성된다. 이산형 시스템에서는 맵 f의 접선 사상 Df를 정의하고, 이를 통해 편차 벡터의 전진을 기술한다. 간단한 2차원 표준 맵과 3차원 해밀토니안 체계 예시를 들어 구체적인 변분 방정식을 도출한다.
3장에서는 LCE 계산의 초기 역사를 조명한다. 1970년대 후반부터 1980년대 초반까지 Benettin, Galgani, Giorgilli, Strelcyn 등이 제안한 최대 LCE 계산법과 다중 LCE를 동시에 구하는 표준 방법이 소개된다. 이때 Oseledec 정리를 실용적인 알고리즘으로 전환하는 과정이 상세히 서술된다.
4장에서는 LCE의 정의, 존재성 정리, 그리고 차수(p)별 LCE 개념을 체계화한다. 1차 LCE는 단일 편차 벡터의 평균 성장률이며, p차 LCE는 p개의 독립 편차 벡터가 형성하는 부피의 평균 성장률이다. MET를 이용해 LCE 스펙트럼이 실수이며, 보존계에서는 양-음 대칭성을 갖는다는 특성을 논한다.
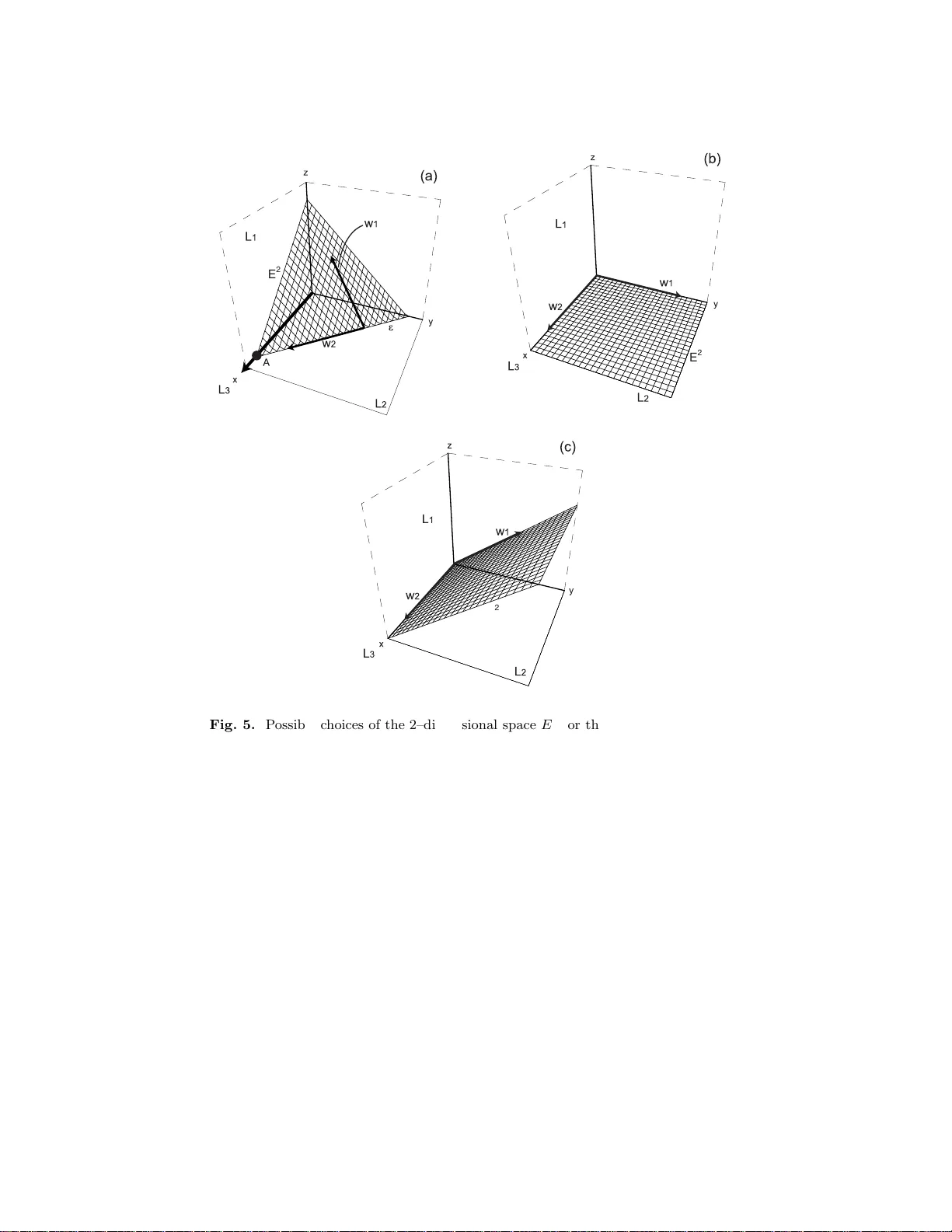
5장에서는 최대 LCE(mLCE) 계산 절차를 구체적으로 제시한다. 초기 편차 벡터 w(0)를 작은 크기로 설정하고, 시스템과 함께 적분한다. 일정 시간 Δt마다 w를 정규화하고, 정규화 계수의 로그를 누적한다. 수식적으로는 χ₁ = lim_{t→∞} (1/t) Σ_{k=1}^{N} ln‖w_k‖/‖w_{k-1}‖ 로 정의된다. 알고리즘은 Euler, Runge‑Kutta 등 일반적인 ODE 적분기법과 결합될 수 있다. 정규화 주기가 너무 짧으면 수치적 잡음이 커지고, 너무 길면 오버플로우가 발생하므로 적절한 Δt 선택이 중요하다. 정규화 후의 벡터는 다시 시스템에 투입되어 성장률을 지속적으로 측정한다.
6장에서는 전체 LCE 스펙트럼을 구하는 표준 방법을 상세히 설명한다. Benettin 등은 p개의 편차 벡터를 동시에 적분하고, 매 정규화 단계에서 QR 분해를 수행한다. Q 행렬은 직교 기저를 제공하고, R 행렬의 대각 원소는 각 단계에서의 성장률을 나타낸다. 시간 평균을 취하면 χ_i = lim_{t→∞} (1/t) Σ ln|R_{ii}| 로 각 LCE를 얻는다. 연속형 QR 알고리즘은 변분 방정식과 동시에 QR 분해를 수행해 오차 전파를 최소화한다. 이산형 QR 알고리즘은 매 스텝마다 변분 행렬을 직접 QR 분해한다.
또한, SVD 기반 방법이 소개된다. 변분 행렬 Φ(t)의 특이값 σ_i(t)를 직접 계산하면 LCE_i = lim_{t→∞} (1/t) ln σ_i(t) 가 된다. SVD는 QR보다 일반적인 경우에 강인하지만 계산 비용이 높다. 저자는 두 방법을 비교하고, 시스템 차원과 요구 정확도에 따라 적절한 선택을 권고한다.
7장에서는 빠른 Lyapunov 지표(FLI)와 일반화 정렬 지수(GALI)를 LCE와 연관시킨다. FLI는 mLCE의 지수적 성장률을 짧은 시간 내에 로그 스케일로 추적해 혼돈 영역을 빠르게 구분한다. GALI는 p개의 편차 벡터가 형성하는 부피가 시간에 따라 어떻게 감소하는지를 측정한다. GALI_k(t) = ‖w₁∧w₂∧…∧w_k‖ 로 정의되며, 정규화된 부피가 지수적으로 감소하면 혼돈, 일정하게 유지되면 정칙 궤도임을 나타낸다. 두 지표 모두 LCE를 직접 계산하지 않으면서도 혼돈 탐지에 유용하다.
8장에서는 비보존계와 시계열 데이터에 대한 LCE 추정 방법을 간략히 다룬다. 비보존계에서는 위상 부피가 수축하므로 LCE 스펙트럼에 음의 값이 포함된다. 이를 반영해 정규화 절차와 평균 방법을 수정한다. 시계열에서는 Takens 임베딩을 이용해 재구성된 위상 공간에서 변분 방정식 없이도 근사 LCE를 계산한다. 이때 임베딩 차원과 지연 시간 선택이 결과에 큰 영향을 미친다.
부록에서는 외부 대수와 wedge product의 기본 개념을 소개해, 부피 요소를 계산하는 데 필요한 수학적 도구를 제공한다. 전체적으로 논문은 LCE의 이론적 근거, 다양한 수치 알고리즘, 그리고 실제 적용 사례를 포괄적으로 정리함으로써, 초보자부터 전문가까지 모두가 활용할 수 있는 종합적인 참고 자료를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기