연속‑이산 시스템을 위한 저복잡도 분산 융합 필터링
초록
**
본 논문은 연속‑이산 형태의 다중 센서 동적 시스템에 대해, 로컬 추정치의 교차 공분산을 재귀적으로 계산하는 새로운 식을 도입하고, 계산량을 크게 줄인 공분산 교차(CI) 알고리즘을 이용한 분산 융합 필터링 기법을 제안한다. 이론적 증명과 시뮬레이션을 통해 제안 방법이 기존 방법 대비 정확도와 연산 효율성에서 우수함을 확인하였다.
**
상세 분석
**
이 논문은 연속‑이산(continuous‑discrete) 시스템, 즉 연속 시간으로 기술되는 시스템 동역학을 갖지만 관측은 이산 시간에 이루어지는 상황을 대상으로 한다. 이러한 시스템은 항법, 로봇공학, 전력망 모니터링 등에서 흔히 나타나며, 다수의 센서가 서로 다른 샘플링 주기를 가지고 독립적으로 추정값을 제공한다는 점이 핵심 난제이다. 기존의 분산 융합 필터링은 각 로컬 필터가 제공하는 추정값과 그 공분산을 중앙 혹은 피어‑투‑피어 방식으로 결합한다. 그러나 로컬 추정치 사이의 교차 공분산(cross‑covariance)을 정확히 계산하려면 모든 센서 쌍에 대해 연속적인 동기화와 복잡한 행렬 연산이 필요해, 실시간 적용이 어려웠다.
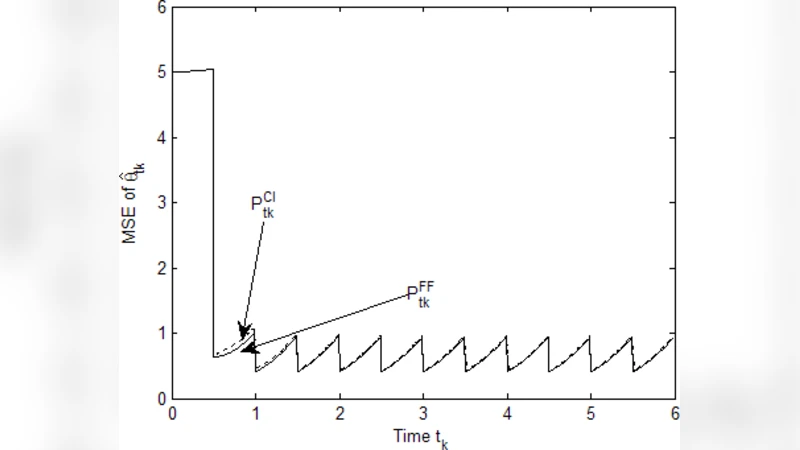
본 연구는 두 가지 혁신적인 접근을 제시한다. 첫째, 로컬 필터 간 교차 공분산을 직접 계산하지 않고도 재귀적으로 업데이트할 수 있는 새로운 수식(식 12‑15)을 도출하였다. 이 식은 연속‑이산 시스템의 상태 전이 행렬 Φ(tₖ, tₖ₋₁)와 측정 행렬 Hᵢ, 그리고 각 로컬 필터의 칼만 이득 Kᵢ를 이용해, 이전 시간 단계의 교차 공분산을 현재 단계로 투영한다. 결과적으로 교차 공분산을 저장하고 전파하는 비용이 O(N²)에서 O(N)으로 감소한다(N은 센서 수).
둘째, 위 재귀식과 결합된 공분산 교차(Covariance Intersection, CI) 알고리즘을 적용한다. CI는 두 추정치의 공분산이 독립적이라고 가정하지 않아도 되는 강건한 융합 방법으로, 가중치 α∈