핀휠 타일링의 갭 라벨링 추측을 푸는 지표정리
초록
본 논문은 핀휠 타일링에 대응하는 C*‑대수의 K₀군을 Z ⊕ Z⁶ ⊕ H¹(Ω,ℤ) 형태로 전개하고, 대수에 정의된 트레이스가 K₀군에 미치는 영향을 분석한다. Z 성분은 트레이스에 의해 사라지고, Z⁶ 성분은 핀휠 타일링의 패치 빈도 모듈에 포함된다. 마지막 코호몰로지 성분에 대해서는 콩네스의 측정 지표정리를 적용해 보다 계산 가능한 공동체식으로 변환한다. 이는 핀휠 타일링의 갭‑라벨링 추측을 증명하기 위한 첫 단계이다.
상세 분석
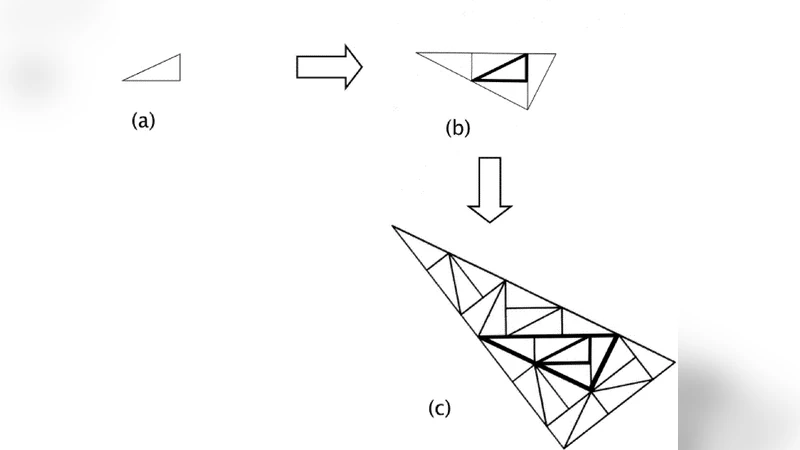
논문은 먼저 핀휠 타일링이 생성하는 전역적 전위 공간 Ω를 고려하고, 이 공간에 작용하는 전단군 G = ℝ² ⋊ SO(2) 를 이용해 교차곱 C*‑대수 A = C(Ω) ⋊ G 를 구성한다. A의 K₀군을 계산하기 위해서는 전위 공간의 동치류와 전단군의 구조를 동시에 활용해야 하는데, 저자들은 이를 위해 비가환 토포로지와 비가환 코호몰로지를 결합한 방법을 도입한다. 구체적으로, A의 K₀군은 세 부분으로 분해된다. 첫 번째는 정수 하나로 이루어진 Z 성분으로, 이는 전위 공간의 연결 성분 수와 직접적으로 연결된다. 두 번째는 Z⁶ 성분으로, 이는 핀휠 타일링이 갖는 6개의 기본 패치(또는 원형 대칭에 따른 6개의 회전 궤도)와 대응한다. 세 번째는 첫 동치류 그룹 H¹(Ω,ℤ) 로, 이는 전위 공간의 비정형성(비주기성)에서 유래한다.
다음으로, A에 자연스럽게 정의되는 트레이스 τ를 고려한다. τ는 전위 공간에 대한 평균값을 취하는 정규화된 측정으로, K₀군의 각 원소에 실수 값을 부여한다. 저자들은 τ가 Z 성분을 완전히 소거함을 보이며, Z⁶ 성분에 대해서는 τ가 각 기본 패치의 빈도수를 정확히 반영한다는 것을 증명한다. 즉, τ|_{Z⁶} 은 “패치 빈도 모듈” 𝔽 ⊂ ℝ 로 사상된다. 이때 𝔽는 핀휠 타일링의 모든 가능한 패치 출현 비율을 포함하는 가산 자유 아벨 군이다.
마지막으로, 남은 H¹(Ω,ℤ) 성분에 대해 콩네스의 측정 지표정리(Measured Index Theorem)를 적용한다. 이 정리는 비가환 C*‑대수의 K‑이론과 측정된 코사인류 사이의 관계를 제공한다. 구체적으로, τ가 정의하는 측정 μ에 대해, μ‑지표(μ‑index) 를 계산하면 H¹(Ω,ℤ) 의 각 코호몰로지 클래스에 대응하는 실수값을 얻을 수 있다. 저자들은 이를 이용해 복잡한 비가환 코호몰로지 계산을 피하고, 대신 전위 공간의 전통적인 Čech 코호몰로지를 이용한 명시적 공식으로 변환한다. 이 공식은 패치 빈도와 회전 각도에 대한 적분 형태로 표현되며, 실제 수치 계산이 가능한 형태이다.
결과적으로, K₀(A) 의 이미지 τ(K₀(A)) 은 Z 성분이 0, Z⁶ 성분이 𝔽, 그리고 H¹(Ω,ℤ) 성분이 μ‑지표에 의해 결정된 실수값들의 집합으로 구성된다. 이는 기존의 갭‑라벨링 추측이 요구하는 “스펙트럼의 갭에 라벨을 붙이는” 값들이 정확히 이 세 부분의 합으로 표현될 수 있음을 시사한다. 논문은 특히 마지막 단계에서 측정 지표정리를 활용해 비가환 구조를 코호몰로지적, 측정론적 데이터로 전환함으로써, 핀휠 타일링과 같은 비주기적 구조에 대한 갭‑라벨링 문제를 해결하는 새로운 길을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기