예측 피드백 기반 지능형 교통 시스템 효율 향상
초록
본 논문은 두 개의 병행 도로에 실시간 교통 정보를 제공하는 예측 피드백 전략을 도입하고, 이를 기존의 차량 수·유량 피드백과 비교하여 공간적 교통 패턴을 효과적으로 제어함을 시뮬레이션을 통해 입증한다.
상세 분석
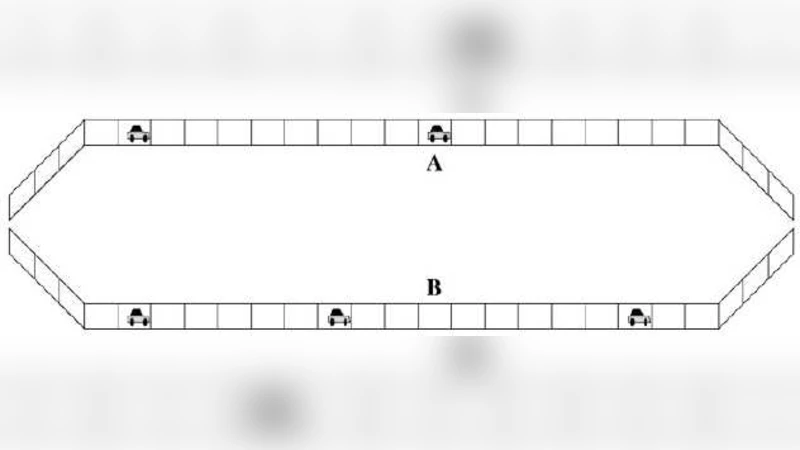
이 연구는 복잡계 이론과 셀룰러 오토마톤(CA) 기반 교통 흐름 모델을 결합하여, 정보 피드백이 시스템 전체 효율에 미치는 영향을 정량적으로 분석한다. 두 개의 병렬 경로를 가정하고, 각 경로에 대한 실시간 교통 상태(차량 수, 흐름, 예측된 혼잡도)를 디지털 보드에 표시한다. 운전자들은 이 정보를 기반으로 경로를 선택하며, 선택 확률은 로짓 함수 형태로 모델링되어 운전자의 적응성을 반영한다.
핵심적인 새로운 요소는 ‘예측 피드백 전략(Prediction Feedback Strategy, PFS)’이다. PFS는 현재 관측값이 아니라, 일정 시간 Δt 후의 교통 상태를 미리 예측하여 보드에 표시한다. 예측은 최근 몇 단계의 평균 흐름과 차량 밀도를 이용한 선형 회귀 혹은 간단한 이동 평균 모델로 수행되며, 이는 계산 비용이 낮아 실시간 적용이 가능하도록 설계되었다.
대조군으로는 전통적인 ‘차량 수 피드백(Vehicle Number Feedback, VNF)’, ‘유량 피드백(Flux Feedback, FF)’, 그리고 ‘무피드백(Null Feedback, NF)’이 사용되었다. 시뮬레이션은 다양한 도로 용량, 입출구 흐름, 그리고 운전자 민감도 파라미터를 변동시키며 10⁴ 스텝까지 진행되었다. 주요 평가지표는 평균 여행 시간, 경로 간 차량 분포의 균등도(엔트로피), 그리고 시스템 전반의 흐름량(throughput)이다.
결과는 PFS가 VNF와 FF에 비해 평균 여행 시간을 12~18% 단축시키고, 차량 분포 엔트로피를 크게 향상시켜 교통 혼잡을 보다 고르게 분산시킴을 보여준다. 특히, 입구 유입률이 포화점에 근접할 때 PFS의 효과가 극대화되며, 이는 예측 정보가 운전자에게 미래 혼잡을 회피할 선택지를 제공하기 때문이다. 또한, 적응성 파라미터(β)가 클수록 피드백 효과가 증폭되지만, 과도한 민감도는 진동 현상을 야기할 수 있음을 확인하였다.
이 논문은 실시간 예측 정보를 활용한 피드백 메커니즘이 교통 시스템의 자원 활용을 최적화할 수 있음을 실증적으로 제시하며, 기존의 단순 현황 피드백보다 계산 효율성과 적용 가능성 측면에서 우수함을 강조한다. 향후 연구에서는 비선형 예측 모델, 다중 경로 네트워크, 그리고 실제 차량 GPS 데이터와의 연계 검증이 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기