무인기 군집을 위한 협업 인터페이스 설계
본 논문은 다수의 무인기(UAV)를 단일 지상 운영자가 효율적으로 관리하도록 돕기 위해, 자연스러운 상호작용과 작업 부하 균형을 고려한 협업 인터페이스와 인터랙션 매니저를 제안한다. 권한 공유 모델, 다중 전략 기반 생성·해석, 그리고 상황에 따른 작업 부하 추정 방식을 통해 임무와 인터랙션 간의 부담을 동적으로 조절한다.
저자: Sylvie Saget, Francois Legras, Gilles Coppin
본 논문은 차세대 무인기(UAV) 시스템에서 단일 지상 운영자가 다수의 UAV를 효과적으로 감독·제어할 수 있도록 돕는 인터페이스 설계 방안을 제시한다. 현재 대부분의 UAV 시스템은 하나의 운영자가 하나의 기체를 제한된 자율성으로 조작하는 형태이며, 향후 여러 대의 UAV가 협업하는 멀티‑에이전트 시스템으로 전환될 경우 작업 복잡도와 인지 부하가 급격히 증가한다. 이를 해결하기 위해 저자들은 두 가지 핵심 요소를 제안한다.
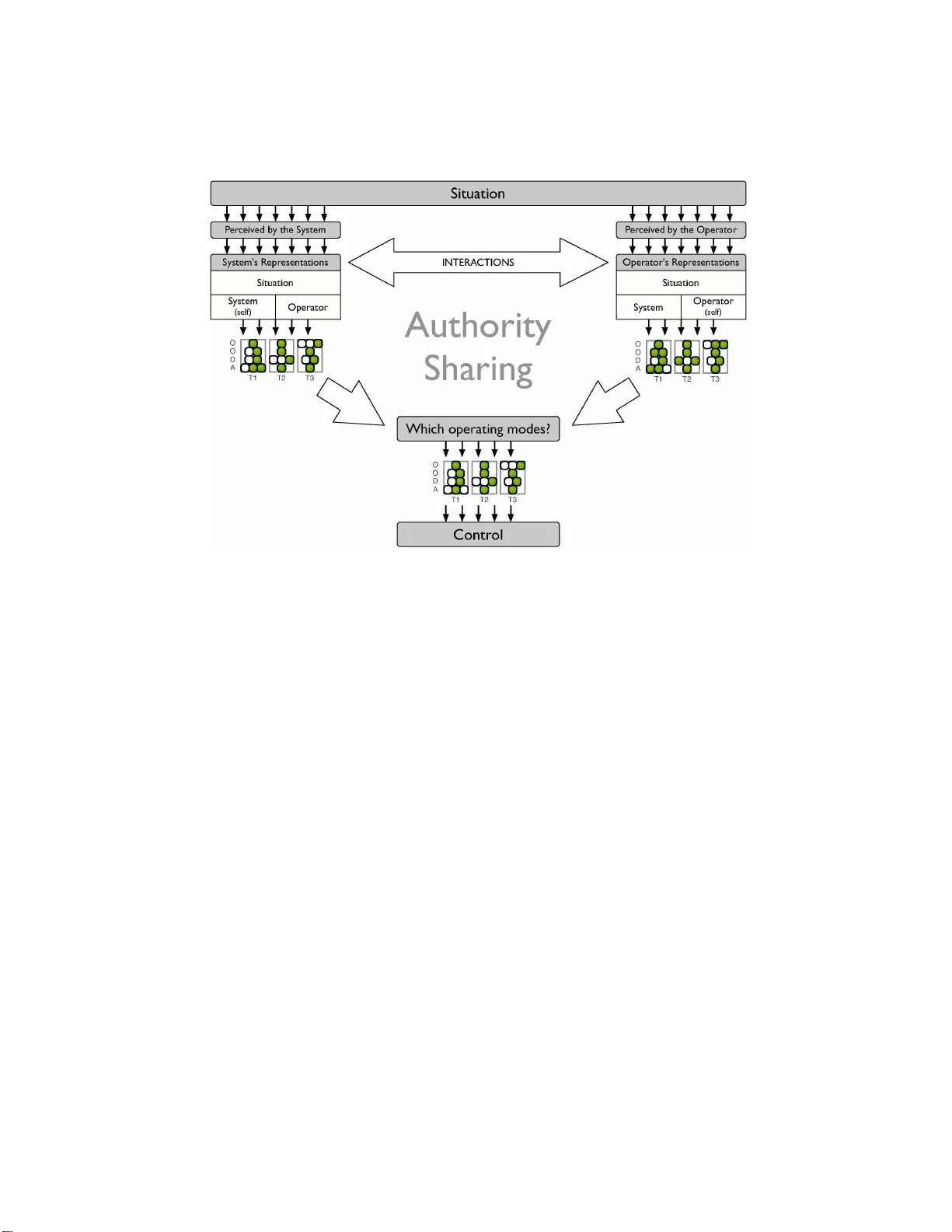
첫째, ‘권한 공유(authority sharing)’ 모델을 기반으로 OODA 루프의 각 단계(Observe, Orient, Decide, Act)마다 여러 운영 모드를 정의한다. 예를 들어, 관측 단계에서는 단일 모드만 허용하지만, 방향 설정이나 행동 단계에서는 수동, 자동, 자동‑비토 등 다양한 옵션을 제공한다. 이렇게 하면 시스템과 인간이 각각 선호하는 제어 수준을 동적으로 선택할 수 있다.
둘째, ‘자연스러운 인터페이스’를 도입한다. 기존의 그래픽 UI는 드롭다운 메뉴·버튼 등 제한된 입력 방식을 사용해 인지 부하를 높인다. 논문에서는 음성 명령, 제스처, 촉각 피드백 등 다중 모달 입력·출력을 활용해 조작자가 직관적으로 UAV를 지시하도록 설계한다. 그러나 자연스러운 입력은 모호성·불명확성으로 인한 비이해가 발생할 위험이 있다. 이를 해결하기 위해 ‘인터랙션 매니저’를 두어 입력을 해석·변환하고, 필요 시 추가 정보를 요청하는 ‘그라운딩’ 과정을 수행한다. 인터랙션 매니저는 (1) 시스템이 조작자에게 제공할 정보를 선택·표현하는 전략을 결정하고, (2) 조작자의 입력을 현재 상황과 과거 그라운딩 기록을 바탕으로 해석한다.
작업 부하 관리 측면에서는 임무 상황을 네 단계(저부하, 중부하, 고부하, 위기)로 구분하고, 각 단계에 맞는 인터랙션 전략을 미리 정의한다. 부하가 낮은 상황에서는 조작자에게 더 많은 인터랙션 책임을 부여해 상황 인식을 강화하고, 부하가 높은 상황에서는 시스템이 자동으로 해석·확인 작업을 수행해 조작자가 핵심 임무에 집중하도록 한다. 이러한 적응형 인터랙션 설계는 인간‑기계 협업을 ‘협업적 대화’로 재구성함으로써 자동화에 따른 부작용(과잉 신뢰, 기술 퇴화 등)을 완화한다.
제안된 개념은 Smaart라는 다중 UAV 지상 제어 스테이션 프로토타입에 적용될 예정이다. Smaart는 로터리‑윙 UAV 군집을 가상의 전략 공역에서 감시·요격하는 시나리오를 제공한다. 시스템은 이중 디지털 페로몬 알고리즘을 사용해 UAV의 자율 행동을 생성하지만, 현재는 비콘 배치·UV 파견 등 기본적인 인터페이스만 제공한다. 논문에서는 향후 Smaart에 자연스러운 입력·출력 모달리티와 인터랙션 매니저를 통합하고, 작업 부하 평가 모델을 적용해 네 단계의 부하 상황을 실시간으로 판단하도록 설계한다.
결과적으로, 이 연구는 (1) 권한 공유를 통한 다중 운영 모드 정의, (2) 자연스러운 다중 모달 인터페이스와 그라운딩 기반 비이해 관리, (3) 상황에 따른 작업 부하 기반 적응형 인터랙션 전략이라는 세 축을 통해 복잡한 UAV 군집 제어에서 인간 조작자의 인지 부하를 최소화하고 상황 인식을 향상시키는 통합 프레임워크를 제시한다. 향후 실험을 통해 입력 효율성, 부하 감소 효과, 임무 성공률 등에 대한 정량적 검증이 진행될 예정이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기