방향 및 가중치 그래프의 겹치는 커뮤니티 검증을 위한 벤치마크
초록
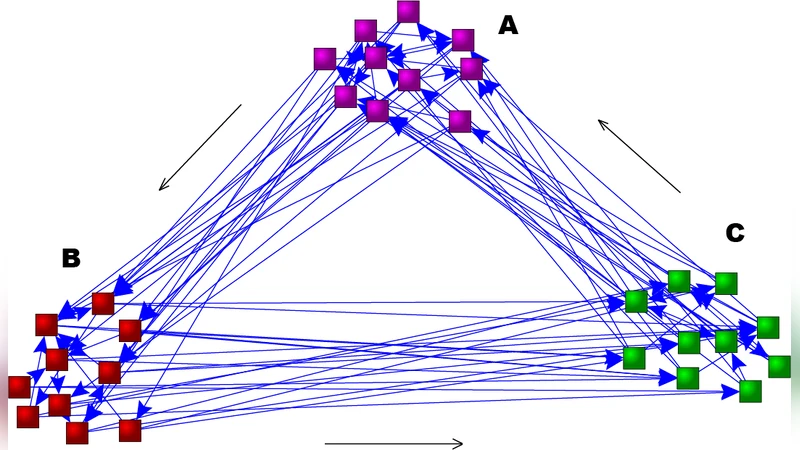
본 논문은 기존 무방향·무가중치 벤치마크를 확장하여, 방향성과 가중치를 갖는 네트워크와 다중 소속(오버랩) 노드를 동시에 모델링한 합성 그래프 생성 방법을 제시한다. 노드 차수와 커뮤니티 크기의 이질성을 유지하면서, 혼합 파라미터와 가중치 분포를 조절해 현실적인 구조를 재현한다. 또한, 제안된 벤치마크에 대해 모듈러리티 최적화 기반 커뮤니티 탐지 알고리즘의 성능을 평가하여, 새로운 벤치마크가 기존 방법론의 한계를 드러내는 데 유용함을 보인다.
상세 분석
이 연구는 복합 네트워크 분석에서 가장 핵심적인 문제 중 하나인 커뮤니티 탐지 알고리즘의 객관적 평가를 위해, 기존 LFR(Lancichinetti‑Fortunato‑Radicchi) 벤치마크를 방향성(directed)과 가중치(weighted)를 동시에 고려하도록 확장한 점이 가장 큰 공헌이다. 먼저, 노드 차수 분포와 커뮤니티 크기 분포를 각각 파워‑law 형태로 설정하고, 이를 그대로 유지하면서 각 엣지에 방향성을 부여한다. 방향성 부여는 두 단계로 이루어진다. 첫째, 무방향 엣지를 생성한 뒤, 사전에 정의된 ‘인‑출 비율’ 파라미터(μ_in, μ_out)를 이용해 각 엣지에 앞뒤 방향을 무작위로 할당한다. 둘째, 실제 네트워크에서 관찰되는 비대칭성 정도를 반영하기 위해, 특정 노드 집합에 대해 ‘역방향 억제’ 매개변수를 도입해 역방향 엣지의 발생 확률을 조절한다.
가중치 할당은 또 다른 중요한 설계 요소이다. 논문은 가중치를 ‘커뮤니티 내부 가중치’와 ‘커뮤니티 외부 가중치’ 두 개의 확률 분포로 구분한다. 내부 가중치는 일반적으로 높은 평균값을 갖는 정규분포(또는 로그정규분포)로 설정하고, 외부 가중치는 평균이 낮은 분포로 지정한다. 이를 통해 ‘가중치 혼합 파라미터(μ_w)’를 정의하고, μ_w가 클수록 커뮤니티 간 가중치 차이가 감소해 탐지 난이도가 상승한다는 점을 실험적으로 확인한다.
오버랩(중복) 커뮤니티를 모델링하기 위해서는 각 노드가 최대 O_max개의 커뮤니티에 소속될 수 있도록 설계한다. 오버랩 노드 비율(O_n)과 각 노드가 실제로 소속된 커뮤니티 수를 제어하는 ‘오버랩 분포 파라미터’를 도입해, 현실 사회망에서 흔히 관찰되는 다중 정체성을 재현한다. 이때, 오버랩 노드의 차수와 가중치가 일반 노드와 동일한 통계적 특성을 유지하도록, 엣지 연결 과정에서 ‘중복 연결 허용’ 메커니즘을 적용한다.
성능 평가에서는 기존 모듈러리티 최적화 알고리즘인 ‘Louvain’과 ‘Infomap’의 변형을 사용해, 생성된 벤치마크에 대한 정밀도·재현율·NMI(Normalized Mutual Information) 등을 측정한다. 실험 결과, 방향성과 가중치를 무시하고 무방향·무가중치 가정으로만 동작하는 알고리즘은 μ와 μ_w가 증가할수록 급격히 성능이 저하되는 반면, 방향·가중치를 고려한 변형 알고리즘은 비교적 완만한 성능 감소를 보였다. 특히, 오버랩 비율이 높아질수록 전통적인 모듈러리티 기반 방법은 오버랩을 하나의 단일 커뮤니티로 오인하는 경향이 뚜렷이 나타났다.
이러한 결과는 새로운 벤치마크가 실제 네트워크의 복합성을 충분히 반영하고 있음을 시사한다. 또한, 파라미터 공간(μ, μ_w, O_n 등)이 넓어 다양한 난이도 수준을 손쉽게 설정할 수 있어, 향후 방향·가중치·오버랩을 모두 지원하는 커뮤니티 탐지 알고리즘 개발 및 비교에 표준 테스트베드로 활용될 가능성이 크다. 다만, 생성 과정이 다단계에 걸쳐 복잡하고 파라미터 조정이 많아, 사용자가 의도한 네트워크 특성을 정확히 재현하려면 사전 실험이 필요하다는 점은 개선 여지로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기