비가우시안 데이터 동화를 위한 앙상블 칼만‑파티클 예측‑보정 필터
본 논문은 대규모 고차원 시스템에서 비가우시안 상태 분포를 효과적으로 추정하기 위해, 앙상블 칼만 필터(EnKF)를 예측 단계로, 파티클 필터(PF)를 보정 단계로 결합한 예측‑보정(PC) 필터를 제안한다. PF의 가중치 계산에 비모수 밀도 추정법을 도입해 비가우시안 특성을 보존하면서도 EnKF가 제공하는 큰 상태 변화를 활용한다. 1차원 이중극성 예제, 스토캐스틱 ODE, 그리고 푸리에 전개를 이용한 PDE 사례에서 기존 EnKF와 PF의 한…
저자: Jan M, el, Jonathan D. Beezley
**1. 서론**
동적 데이터 구동 응용 시스템(DDDAS)은 모델링, 관측, 데이터 획득을 실시간으로 결합한다. 데이터 동화는 이러한 시스템에서 모델 상태를 관측에 맞추는 핵심 통계 기법이며, 특히 편미분 방정식(PDE) 기반 모델은 수백만 자유도를 가진다. 비선형성으로 인해 상태 분포는 일반적으로 비가우시안이며, 기존의 가우시안 기반 필터(칼만, EnKF)는 이러한 비가우시안 특성을 제대로 반영하지 못한다. 반면 파티클 필터는 비가우시안을 정확히 표현하지만, 샘플이 관측에 충분히 접근하지 못하는 ‘샘플 고갈’ 문제가 있다. 따라서 두 방법의 장점을 결합한 새로운 필터가 필요하다.
**2. 방법론**
- **초기 앙상블 생성**: 상태 공간 V=ℝ^m에 대해 정규분포 기반의 랜덤 계수 λ_n·d_n·ϕ_n(·) 형태로 초기 앙상블을 만든다. 여기서 ϕ_n은 정규 직교 기저(푸리에, 브레드 벡터 등)이며, λ_n은 고주파 성분을 억제하도록 설계한다.
- **예측 단계 (EnKF)**: 각 앙상블 멤버 u_f^k를 모델에 전진시키고, 관측 d_k∼N(d,R)와 칼만 이득 K=QHᵀ(HQHᵀ+R)⁻¹을 이용해 분석 멤버 u_a^k = u_f^k + K(d_k – H u_f^k) 로 업데이트한다. 여기서 Q는 가중치가 부여된 샘플 공분산이다.
- **보정 단계 (SIS)**: EnKF가 만든 분석 집합을 제안 분포 p_p(u) 로 보고, 중요도 가중치 w_a^k ∝ p(d|u_a^k)·p_f(u_a^k)/p_p(u_a^k) 를 계산한다. 직접적인 밀도 비율을 구하기 어려우므로, Loftsgaarden‑Quesenberry 방식의 비모수 밀도 추정을 적용한다. 각 파티클에 대해 k··_U 노름으로 측정된 거리 h_k 를 정의하고, h_k 내에 존재하는 이웃 파티클 수를 이용해 밀도 비율을 근사한다. 최종 가중치는 정규화되어 Σ w_a^k = 1 이 된다.
**3. 알고리즘 요약 (EnKF‑SIS)**
1) 초기 앙상블 (u_f^k, w_f^k) 생성 → w_f^k = 1/N.
2) 모델 전진 후 EnKF 예측 → u_a^k.
3) 비모수 밀도 추정으로 가중치 w_a^k 재계산.
4) 필요 시 재샘플링 수행.
**4. 수치 실험**
- **이중극성 사전**: 1차원에서 두 개의 가우시안 피크를 합성한 사전 분포에 대해 관측을 삽입. EnKF는 중앙에 단일 피크를 만들며 비가우시안을 소멸시킨다. SIS와 EnKF‑SIS는 원래 두 피크를 유지한다.
- **스토캐스틱 ODE (du/dt = 4u – 4u³ + κη)**: 두 안정점 ±1 사이 전이를 포함하는 시스템. 관측은 Gaussian이며, EnKF‑SIS는 전이 시점에서 평균 추정이 최적 베이즈 해와 가장 가깝게 일치한다. EnKF는 전이 전후의 비대칭을 놓치고, SIS는 전이 속도가 느려 실시간 추적에 한계가 있다.
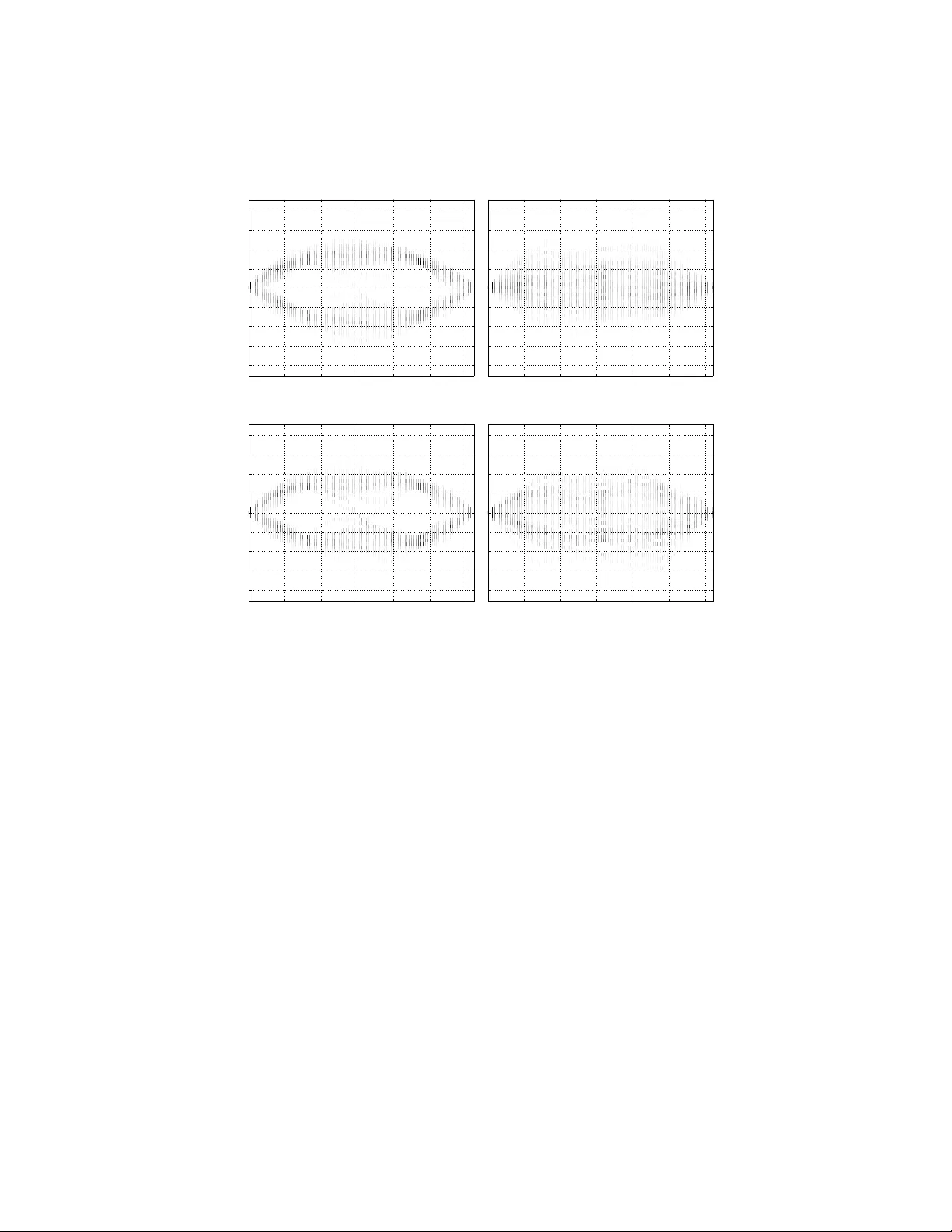
- **푸리에 전개 기반 PDE**: 상태 u(x)=∑_{n=1}^{d} c_n sin(nx) 로 표현, 차원 d=500, 앙상블 N=100. 두 가지 비가우시안 관측 시나리오를 테스트하였다. (a) 관측이 두 구간에 집중된 경우, EnKF는 중앙에 몰아버리지만 EnKF‑SIS는 가장자리 밀도를 유지한다. (b) 관측값이 크게 변하는 경우(예: u(π/2)=7), SIS는 샘플이 부족해 도달하지 못하지만 EnKF‑SIS는 EnKF의 큰 상태 변화를 활용해 목표값에 근접한다.
**5. 결론 및 향후 과제**
EnKF‑SIS는 고차원 비가우시안 데이터 동화 문제에서 기존 필터들의 약점을 보완한다. 특히 큰 상태 변화를 필요로 하는 상황에서도 파티클이 관측 영역에 도달하도록 돕고, 비가우시안 특성을 유지한다. 그러나 아직 해결해야 할 문제는: (1) 다중 시간 단계에 걸친 고차원 수렴성 이론, (2) 비모수 밀도 추정의 수학적 수렴 증명, (3) 실제 대기·해양 모델에 대한 적용 및 복합 변수·모드 처리 능력이다. 향후 연구는 이러한 이론적 기반을 강화하고, 실용적인 대규모 시스템에 적용 가능한 효율적인 구현을 목표로 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기