유향 그래프에서 움직임 계획 가능성 연구
초록
본 논문은 비대칭 통신 네트워크를 모델링하는 유향 그래프 상에서 로봇의 움직임 계획 문제의 실현 가능성을 조사한다. 비순환(acyclic) 그래프와 강하게 연결된(strongly connected) 그래프 두 경우에 대해 각각 선형 시간 알고리즘을 제시하고, 후자의 경우 강한 양단연결성(strong biconnectivity) 분해 정리를 도입하여 구조적 이해를 돕는다.
상세 분석
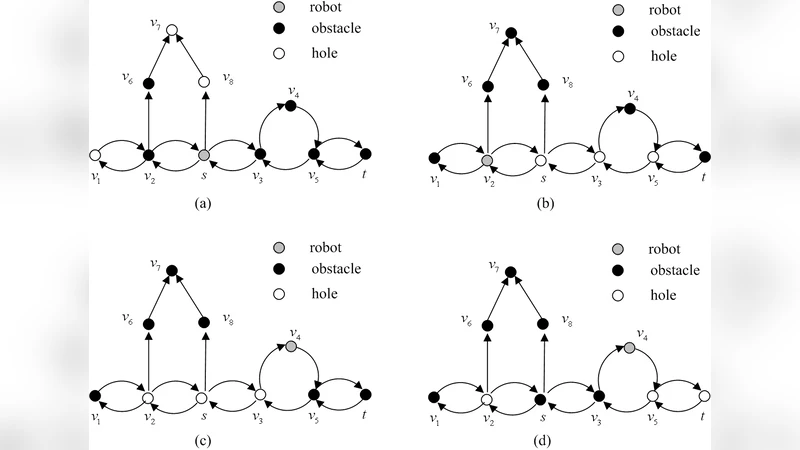
논문은 먼저 유향 그래프에서 움직임 계획 문제를 정의한다. 여기서 각 정점은 하나의 로봇 혹은 빈 공간을 나타내며, 호는 로봇이 한 정점에서 인접 정점으로 이동할 수 있는 일방향 이동 가능성을 의미한다. 무방향 그래프와 달리 이동이 가역적이지 않기 때문에 전통적인 경로 탐색 기법을 그대로 적용할 수 없으며, 따라서 새로운 복합성 요인이 등장한다. 저자들은 이러한 비가역성을 고려한 알고리즘 설계에 두 단계 접근법을 채택한다. 첫 번째 단계는 사이클이 존재하지 않는 DAG(Directed Acyclic Graph) 상황이다. DAG에서는 위상 정렬을 이용해 정점들을 선형 순서로 배치하고, 각 정점에 대해 현재 로봇의 존재 여부와 목표 위치를 비교하면서 필요한 이동을 순차적으로 수행한다. 이 과정은 각 정점과 호를 한 번씩만 방문하면 되므로 시간 복잡도는 O(|V|·|E|)가 된다. 두 번째 단계는 강하게 연결된 그래프이다. 강연결성은 모든 정점 쌍 사이에 상호 도달 가능성을 보장하지만, 여전히 이동이 일방향이므로 단순히 역방향 경로를 이용할 수 없다. 이를 해결하기 위해 저자들은 강한 양단연결성(strong biconnected) 컴포넌트로 그래프를 분해하는 구조 정리를 증명한다. 강한 양단연결성 컴포넌트는 내부에서 양방향 이동이 가능한 최소 단위이며, 이러한 컴포넌트들을 축소하면 축소 그래프는 DAG 형태가 된다. 따라서 전체 문제는 “컴포넌트 내부 이동 가능성 검증 + 축소 DAG 상의 이동 계획” 두 부분으로 나뉜다. 컴포넌트 내부에서는 임의의 순환을 이용해 로봇을 원하는 위치로 재배치할 수 있음을 보이며, 이는 선형 시간에 수행된다. 축소 DAG에 대해서는 앞서 제시한 DAG 알고리즘을 그대로 적용한다. 결과적으로 전체 알고리즘은 각 정점과 호를 상수 횟수만큼 탐색하므로 O(|V|·|E|) 시간 복잡도를 유지한다. 이와 같은 접근법은 기존 무방향 그래프 기반의 움직임 계획 연구와는 달리, 비가역성에 따른 제약을 구조적으로 해소한다는 점에서 학술적 의의가 크다. 또한, 강한 양단연결성 분해 정리는 유향 네트워크의 토폴로지를 분석하는 새로운 도구로 활용될 가능성을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기