트리폭과 클리크폭을 활용한 기본 그래프 파라미터 다항시간 알고리즘 비교
본 논문은 트리폭이 제한된 그래프와 클리크폭이 제한된 그래프에서 독립집합 크기·클리크 크기·색칠 수 최소 색 수·클리크 커버 수 네 가지 기본 파라미터를 다항시간에 계산하는 동적 프로그래밍 기법을 제시한다. 특히 트리폭 1인 트리와 클리크폭 2인 코-그래프에 대해서는 선형 시간 알고리즘을 제공한다.
저자: Frank Gurski
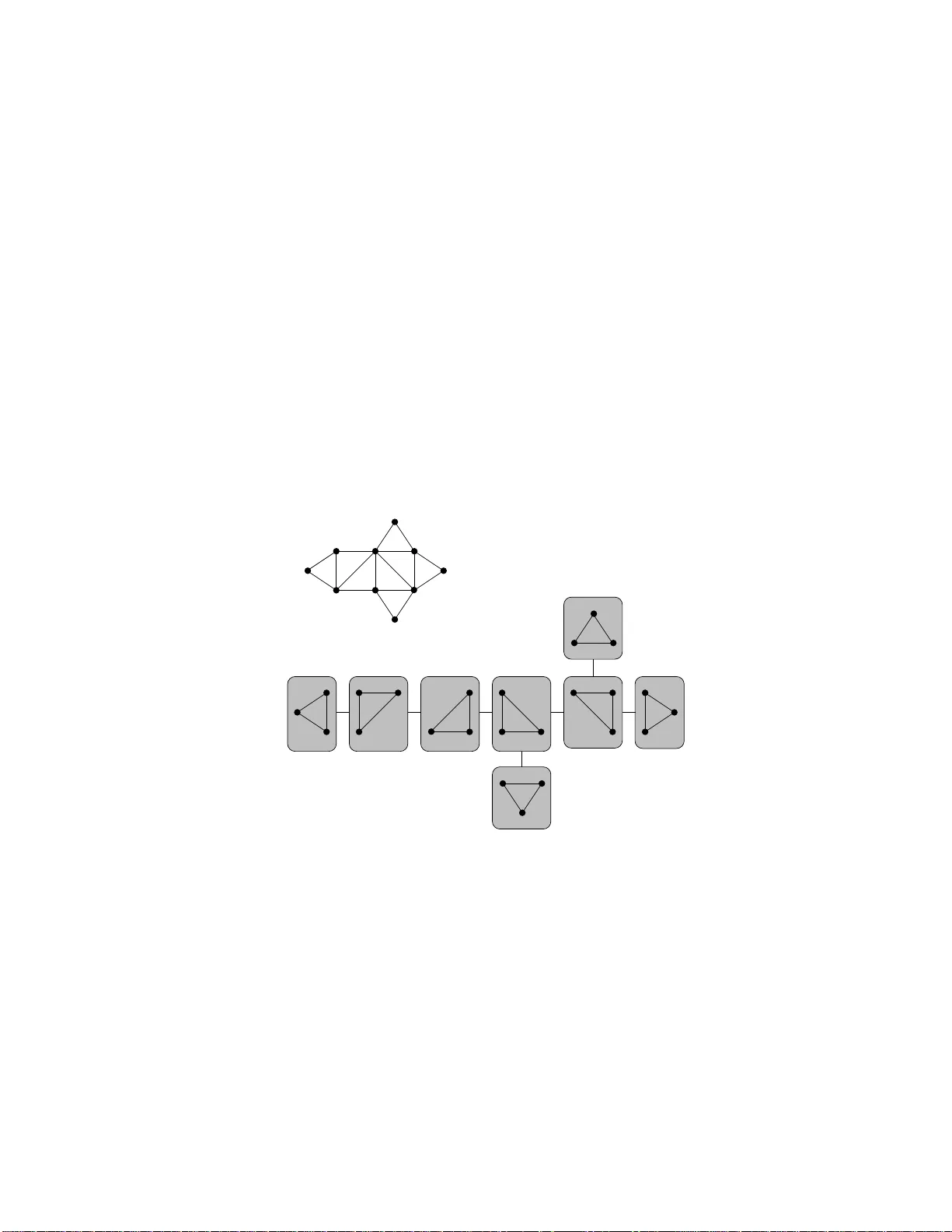
이 논문은 그래프 이론에서 핵심적인 네 가지 파라미터—독립집합 크기(α), 최대 클리크 크기(ω), 색칠 수 최소 색 수(χ), 그리고 클리크 커버 수(θ)—를 트리폭(tree‑width)과 클리크폭(clique‑width)이라는 두 가지 구조적 제한 하에서 효율적으로 계산하는 방법을 제시한다. 먼저, 트리폭이 k인 그래프는 트리 분해(TD)를 통해 각 bag에 최대 k+1개의 정점이 포함되는 특성을 가진다. 저자는 이 트리 분해를 기반으로 동적 프로그래밍(DP) 프레임워크를 설계한다. 각 bag에 대해 가능한 정점 라벨링(예: 독립집합에 포함 여부, 색 번호 등)을 상태로 정의하고, 하위 bag에서 전달된 정보를 결합함으로써 전체 그래프에 대한 파라미터 값을 구한다. 이 과정은 각 bag당 O(2^{k+1}) 혹은 O(k^{k+1}) 정도의 상태 공간을 갖지만, k가 고정 상수이면 전체 복잡도는 O(n) 수준이 된다.
다음으로, 클리크폭이 k인 그래프는 k‑표현식(k‑expression)이라는 연산 트리를 통해 생성된다. 표현식은 기본 정점 생성(•a), 병합(⊕), 라벨 재지정(ρ_{a→b}), 라벨 쌍 사이에 모든 간선 추가(η_{a,b}) 연산으로 구성된다. 논문은 이러한 연산 트리를 순회하면서 DP를 수행하는 방법을 제시한다. 각 연산 노드마다 현재까지 구성된 부분 그래프에 대한 파라미터 값들의 가능한 조합을 테이블에 저장하고, 연산 규칙에 따라 테이블을 업데이트한다. 이 방식 역시 라벨 종류가 k에 의존하므로 상태 수는 k에 대한 지수 함수이지만, k가 상수이면 전체 알고리즘은 O(n) 시간에 실행된다.
특히 트리폭이 1인 트리와 클리크폭이 2인 코‑그래프(즉, P₄‑free 그래프)에 대해서는 라벨 종류와 연산이 매우 제한적이어서, DP 테이블이 상수 크기를 유지한다. 따라서 저자는 이 두 특수 클래스에 대해 선형 시간 알고리즘을 명시적으로 제시하고, 구현상의 간단함을 강조한다.
논문은 또한 트리폭과 클리크폭 사이의 이론적 관계를 정리한다. 모든 트리폭 k 그래프는 클리크폭 ≤3·2^{k}를 가지며, 반대로 클리크폭이 제한된 그래프가 반드시 작은 트리폭을 갖는 것은 아니다(예: 완전 그래프 K_n은 클리크폭 2이지만 트리폭 n‑1). 이러한 비대칭성에도 불구하고, 두 파라미터가 모두 제한된 경우에는 NP‑hard 문제들이 FPT(고정 파라미터 트래킹) 수준으로 낮아진다.
마지막으로, 저자는 정점 커버와 지배 집합 같은 추가 파라미터도 동일한 DP 프레임워크를 적용할 수 있음을 언급한다. 전체적으로 이 논문은 트리폭과 클리크폭이라는 두 강력한 구조적 제한을 활용해, 전통적으로 NP‑hard인 그래프 파라미터들을 다항시간 혹은 선형 시간에 해결할 수 있는 구체적인 알고리즘 설계와 복잡도 분석을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기