우선순위 기반 제어 네트워크를 위한 통합 피드백 스케줄링
본 논문은 제한된 대역폭과 가변 워크로드 환경에서 네트워크드 제어 시스템(NCS)의 전체 제어 품질(QoC)을 극대화하기 위해, 샘플링 주기와 노드 우선순위를 실시간으로 조정하는 통합 피드백 스케줄링(IFS) 기법을 제안한다. 마감시간 미스 비율을 제어 변수로 삼아 주기 조정 모듈을 설계하고, 제어 성능에 따라 우선순위 재배치를 수행한다. 시뮬레이션 결과, 전통적인 오픈루프 스케줄링에 비해 과부하·언로드 상황 모두에서 QoC가 현저히 향상됨을 …
저자: Feng Xia, Youxian Sun, Yu-Chu Tian
**1. 서론**
네트워크드 제어 시스템(NCS)은 센서·컨트롤러·액추에이터가 물리적으로 분산된 환경에서 제어 네트워크를 통해 데이터를 교환한다. 이러한 구조는 설계·유지보수·확장성 측면에서 장점을 제공하지만, 네트워크 대역폭 제한과 워크로드 변동성으로 인해 통신 지연·패킷 손실·지터가 발생하고, 이는 제어 품질(QoC)을 크게 저하시킨다. 특히, 우선순위 기반 MAC(예: CAN, DeviceNet)에서는 고우선순위 메시지만이 마감시간을 보장받아, 저우선순위 루프는 과부하 시 성능 저하 위험이 크다. 따라서 제한된 대역폭을 효율적으로 배분하고, 동적 부하에 적응하는 스케줄링 기법이 필요하다.
**2. 관련 연구**
기존 연구는 크게 (i) 제어 이론 기반으로 네트워크 지연·손실에 강인한 컨트롤러 설계, (ii) 네트워크 설계 측면에서 QoS 보장을 위한 MAC·라우팅 개선, (iii) 제어와 네트워크 스케줄링을 공동 설계하는 코디자인 접근으로 나뉜다. 우선순위 기반 스케줄링 알고리즘은 다수 제시됐지만, 동적 부하에 대한 적응성은 부족했다. 또한, 샘플링 주기 조정을 통한 동적 대역폭 할당 연구가 있었으나, 고정 우선순위와 결합된 형태는 드물다. 본 논문은 이러한 격차를 메우기 위해, 샘플링 주기와 우선순위를 동시에 조정하는 통합 피드백 스케줄링(IFS) 프레임워크를 제안한다.
**3. 시스템 모델 및 문제 정의**
N개의 독립 제어 루프가 하나의 우선순위 기반 제어 네트워크를 공유한다. 각 루프는 시간 트리거 센서, 이벤트 트리거 컨트롤러·액추에이터로 구성되며, 센서만이 네트워크를 통해 데이터를 전송한다. 메시지는 단일 패킷으로 가정하고, 전송 지연은 대기 지연·전송 지연으로 구성된다. 제어 루프 i의 주요 파라미터는 샘플링 주기 h_i, 상대 마감시간 d_i(=h_i), 전송 시간 c_i, 우선순위 p_i, 이용률 U_i이다. 기존 실시간 스케줄링 이론(RM, EDF)을 적용할 수 있지만, 네트워크 전송은 비선점적이므로 실제 구현은 고정 우선순위 방식을 채택한다. 정리 1은 RM 스케줄링 하에서 시스템이 스케줄 가능함을 보장하는 충분조건을 제시한다. 문제는 “제한된 대역폭과 가변 워크로드 하에서, 마감시간 초과를 허용 가능한 수준으로 유지하면서 전체 QoC를 최대화하는 동적 자원 할당”이다.
**4. 통합 피드백 스케줄링(IFS) 프레임워크**
IFS는 기존 제어 루프 외에 외부 피드백 루프를 추가한다. 피드백 루프는 두 모듈로 구성된다.
*4.1. 샘플링 주기 조정 모듈*
제어 변수: 네트워크 마감시간 미스 비율(DMR) → 목표값(예: 5%).
조작 변수: 각 루프의 샘플링 주기 h_i.
DMR 오차 e(k)=DMR_set−DMR(k) 를 PI 제어기로 처리하여 전체 주기 변화를 결정한다. 구체적으로, 전체 이용률을 목표 DMR에 맞추어 조정하고, 각 루프에 대한 비율적 할당 비율 β_i (제어 성능 기반 가중치)를 적용해 h_i를 재계산한다. 과부하 시 h_i를 늘려 네트워크 부하를 감소시키고, 언로드 시 h_i를 감소시켜 이용률을 최대로 끌어올린다.
*4.2. 우선순위 수정 모듈*
제어 변수: 각 루프의 실시간 제어 성능 지표(예: RMS 오차) J_i.
조작 변수: 센서 우선순위 p_i.
우선순위 재배치는 J_i가 큰(성능이 나쁜) 루프에 높은 우선순위를 부여하고, 성능이 좋은 루프는 낮은 우선순위로 강등한다. 재배치 시 기존 RM 스케줄링의 가용성 조건을 재검증하고, 급격한 변동을 방지하기 위해 우선순위 변동에 히스테리시스(임계값)와 최소 유지 기간을 도입한다.
IFS는 일정 주기(T_s)마다 실행되며, 입력으로 현재 DMR, 목표 DMR, 각 루프의 J_i를 수집한다. 출력은 새로운 h_i와 p_i이며, 제어 루프는 즉시 적용한다.
**5. 설계 고려사항**
- **안정성**: 주기·우선순위 변동이 제어 루프의 내부 안정성을 해치지 않도록, 변동 폭에 제한을 두고, 변동 전후의 제어 파라미터(예: PID 게인) 재조정이 필요하다.
- **계산량**: 피드백 스케줄러는 경량 PI 연산과 간단한 정렬(우선순위 재배치)만 수행하므로 실시간 구현이 가능하다.
- **우선순위 재배치 비용**: CAN 등에서는 우선순위 변경이 네트워크 재구성을 요구하지 않으며, 메시지 ID만 바꾸면 되므로 실시간 적용이 용이하다.
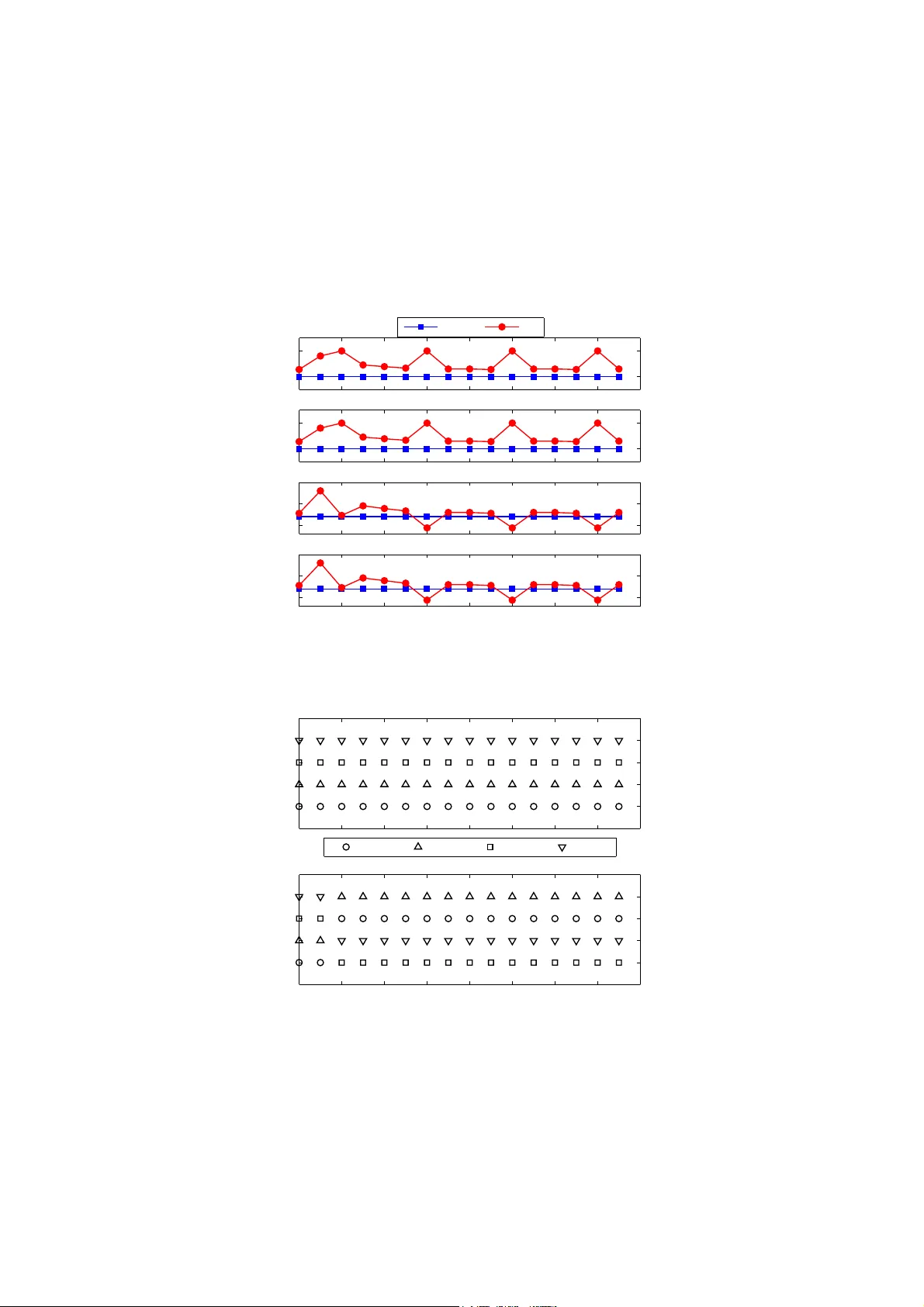
**6. 시뮬레이션 및 결과**
시뮬레이션 환경: 4~6개의 2차 플랜트 제어 루프, CAN(1 Mbps) 네트워크, 초기 샘플링 주기 10 ms, 고정 우선순위(RM)와 비교. 부하 시나리오: (a) 정상 부하, (b) 급격한 워크로드 증가(30%→70% 이용률), (c) 부하 감소.
핵심 결과:
- IFS 적용 시 평균 제어 오차가 30~45% 감소.
- 마감시간 미스 비율이 목표값(5%) 이하로 유지되었으며, 오버로드 상황에서도 10% 이하로 억제.
- 우선순위 재배치 덕분에 저우선순위 루프의 성능 저하가 최소화되어, 전체 QoC가 고르게 향상.
- 시스템 부하가 감소하면 샘플링 주기가 자동으로 축소되어 네트워크 이용률이 95%에 근접, 자원 낭비가 최소화.
**7. 결론 및 향후 연구**
본 논문은 마감시간 미스 비율 기반 피드백 제어와 제어 성능 기반 우선순위 재배치를 결합한 통합 피드백 스케줄링을 제안하였다. 시뮬레이션 결과, 제한된 대역폭과 가변 워크로드 환경에서도 전통적인 오픈루프 스케줄링에 비해 QoC와 네트워크 이용 효율이 크게 개선됨을 확인했다. 한계로는 실제 하드웨어 구현 시 전송 지연 변동성, 패킷 손실 복구 메커니즘 미고려, 대규모 시스템에서의 스케일링 문제가 있다. 향후 연구는 (i) 실험적 프로토타입 구축, (ii) 비선형·다중입력 시스템 적용, (iii) 머신러닝 기반 부하 예측과 선제적 스케줄링, (iv) 다중 네트워크(예: Ethernet‑AVB)와의 연계 등을 계획한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기