무한 차원 소뇌 제어기와 현실 인간 생체역학
초록
본 논문은 피험자 행동을 기술하는 비보존적 해밀토니안 시스템 위에, 파인만의 작용‑진폭(분할함수) 형식을 이용한 무한 차원 소뇌 신경망 제어기를 설계한다. 이 제어기는 자가생성 서보 제어를 감독하며, 엔트로피 기반 모터 제어와의 연관성을 제시한다.
상세 분석
논문은 인간 근골격계의 동역학을 ‘소산(dissipative)·구동(driven) 해밀토니안’ 형태로 모델링하고, 이를 상위 수준에서 소뇌가 수행하는 무한 차원 신경망으로 감싸는 구조를 제안한다. 파인만의 경로 적분 방식, 즉 작용‑진폭(액션‑앰플리튜드) 공식은 물리학에서 양자역학 및 통계역학의 기본 도구로 사용되는데, 이를 신경제어에 적용함으로써 연속적인 상태공간을 무한 차원 함수 공간으로 확장한다. 이 접근은 전통적인 피드백 제어와 달리, 시스템의 전체 라그랑지안/해밀토니안을 통합적으로 최소화하는 ‘엔트로피 최적화’ 원리를 도입한다는 점에서 혁신적이다.
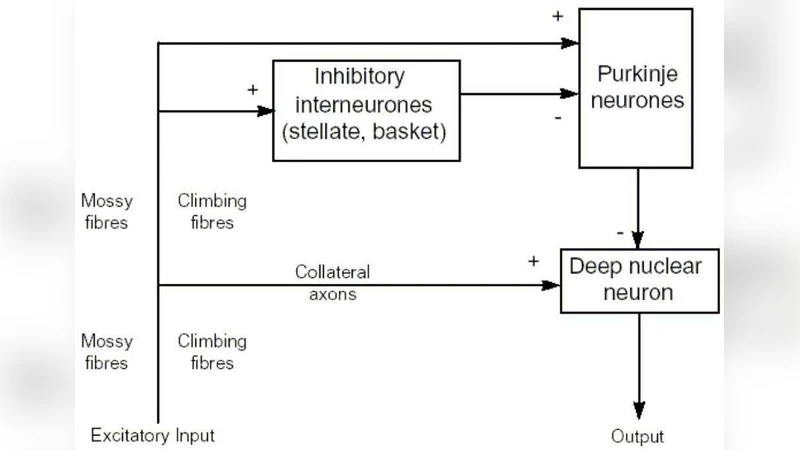
수학적으로는 무한 차원 힐베르트 공간 위의 변분 원리를 이용해 최적 제어 함수를 도출하고, 이를 ‘자기생성(autogenetic) 서보’ 메커니즘에 매핑한다. 여기서 ‘자기생성’은 근섬유와 골격근 사이의 감각‑운동 피드백 루프를 의미하며, 소뇌가 이 루프를 실시간으로 조정한다는 가정을 담고 있다. 논문은 또한 엔트로피 기반 모터 제어와의 연관성을 언급하는데, 이는 시스템의 불확실성을 확률분포로 표현하고, 최소 엔트로피 원칙을 통해 제어 정책을 선택한다는 의미다.
하지만 몇 가지 한계도 존재한다. 첫째, 무한 차원 모델을 실제 구현하기 위한 수치적 근사 방법이 구체적으로 제시되지 않아, 계산 복잡도와 실시간 적용 가능성이 의문이다. 둘째, 인간 근골격계의 비선형성, 시냅스 가소성, 그리고 소뇌의 복잡한 회로 구조를 단순히 해밀토니안 형태로 환원하는 것이 생물학적 타당성을 손상시킬 위험이 있다. 셋째, 파인만 경로 적분을 신경제어에 적용할 때, 경로의 경계조건과 측정 노이즈 처리에 대한 명확한 규정이 부족하다. 따라서 이론적 기여는 크지만, 실험적 검증과 구현 전략이 추가로 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기