모듈형 네트워크 로봇을 위한 마이크로컨트롤러 기반 시스템
초록
본 논문은 무선 웹 제어가 가능한 모듈형 네트워크 로봇 프로토타입을 제시한다. 로봇은 메인 유닛, 데이터 획득 모듈, 데이터 처리 모듈의 3가지 하드웨어 블록으로 구성되며, 마이크로컨트롤러를 이용해 각 모듈을 독립적으로 교체·확장할 수 있다. 웹 인터페이스를 통해 실시간 데이터 수집·분석 결과와 제어 명령을 원격으로 접근 가능하게 함으로써 유연성, 접근성, 저비용 개발·유지보수라는 세 가지 핵심 장점을 제공한다.
상세 분석
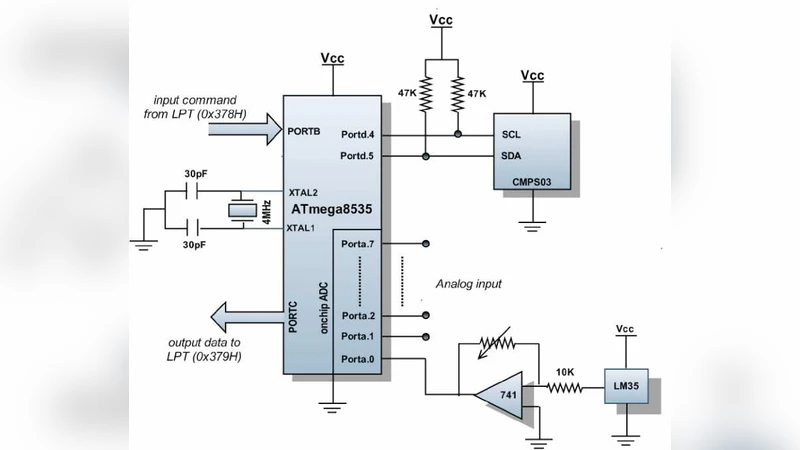
이 연구는 로봇 시스템의 모듈화를 구현하기 위해 마이크로컨트롤러를 중심으로 한 계층형 구조를 설계하였다. 첫 번째 계층인 메인 유닛은 전원 관리, 무선 통신(예: Wi‑Fi 혹은 ZigBee), 그리고 전체 시스템의 상태 모니터링을 담당한다. 여기서는 라즈베리파이와 같은 싱글보드 컴퓨터와 AVR 혹은 ARM 기반 MCU를 결합해 실시간 제어와 고수준 애플리케이션을 동시에 수행한다는 점이 특징이다. 두 번째 계층인 데이터 획득 모듈은 센서 인터페이스 회로와 ADC, 디지털 I/O를 포함하며, 각 센서는 모듈 교체 시 핀맵을 재구성할 필요 없이 플러그‑인 방식으로 연결된다. 이는 센서 종류(온도, 습도, 가스, 초음파 등)와 수량을 사용자가 자유롭게 선택할 수 있게 해준다. 세 번째 계층인 데이터 처리 모듈은 수집된 원시 데이터를 실시간으로 전처리하고, 필요에 따라 로컬에서 간단한 통계·필터링을 수행한다. 복잡한 알고리즘이나 머신러닝 모델은 메인 유닛의 웹 서버를 통해 클라우드와 연동하거나, 오프라인 상태에서도 로컬 DB에 저장한다.
모듈 간 통신은 UART, I²C, SPI 등 표준 프로토콜을 사용해 구현되었으며, 각 인터페이스는 핀 재배치를 최소화하도록 설계돼 있다. 특히, 마이크로컨트롤러 펌웨어는 모듈 식별(ID)과 동적 로드 기능을 내장해, 새로운 모듈이 연결되면 자동으로 드라이버를 검색·로드한다. 이는 시스템 확장성을 크게 향상시킨다.
소프트웨어 측면에서는 전체 로봇을 제어·모니터링하는 웹 인터페이스가 HTML5와 JavaScript 기반으로 구현돼, 브라우저만 있으면 어떤 운영체제에서도 접근이 가능하다. 실시간 그래프, 로그 다운로드, 원격 명령 전송 등 기능이 통합돼 있다. 또한, RESTful API를 제공해 외부 애플리케이션이 로봇 데이터를 직접 호출하거나 제어 명령을 전송할 수 있다.
경제성 측면에서 하드웨어는 대부분 저가형 MCU와 오픈소스 보드, 그리고 표준 커넥터를 사용했으며, 소프트웨어는 오픈소스 라이브러리와 자체 개발 스크립트로 구성돼 라이선스 비용을 최소화했다. 유지보수는 모듈 교체만으로 가능하므로, 고장 난 센서나 통신 회로를 전체 시스템을 재구성하지 않고도 빠르게 교체할 수 있다.
이러한 설계는 연구·교육용 로봇뿐 아니라 환경 모니터링, 재난 대응, 스마트 팜 등 다양한 분야에 적용 가능하며, 특히 제한된 예산과 빠른 프로토타이핑이 요구되는 상황에서 큰 장점을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기