다목적 차량 라우팅을 위한 유전 알고리즘
본 논문은 차량 라우팅 문제(VRPTW)를 다목적 최적화 대상으로 삼아, 지배 관계 기반 적합도 연산자를 이용한 유전 알고리즘을 제안한다. 거리, 차량 수, 시간창 위반 횟수·규모 등 네 가지 목표를 동시에 최소화하며, GUI를 통해 진행 상황과 파라미터를 실시간으로 조정·시각화한다.
저자: ** M. J. Geiger (University of Hohenheim, Production, Operations Management) **
본 논문은 다목적 최적화 문제에 대한 일반적인 유전 알고리즘(GA) 접근법을 제시하고, 이를 차량 라우팅 문제(VRPTW) 해결에 적용한다. 서론에서는 다목적 최적화에서 단일 목표를 가중합으로 변환하는 전통적 방법이 볼록‑우세(Convex‑Dominated) 해를 놓치는 한계를 지적한다. 이를 보완하기 위해, 개체 간 지배 관계를 이용한 적합도 연산자를 설계한다.
구체적으로, 인구집단 크기 n_pop 에 대해 각 개체 i에 대해 자신보다 우수한(즉, 지배당하지 않는) 개체 수 ξᵢ를 계산한다. ξᵢ는 0부터 n_pop‑1 사이의 정수이며, ξᵢ가 작을수록 해당 개체는 파레토 전선에 가깝다. 적합도 f(i)는 선형 정규화 식 (5) f(i)=f_max−(f_max−f_min)·(ξᵢ/ξ_max) 로 정의된다. 여기서 f_max와 f_min은 각각 가장 높은·가장 낮은 적합도 값이며, ξ_max는 전체 개체 중 최대 ξ값이다. 이 정의는 ξᵢ=0인 비지배 개체에게 최고 적합도를 부여하고, ξᵢ=ξ_max인 최악 개체에게 최저 적합도를 부여함으로써, 선택 연산자가 자연스럽게 비지배 개체를 우선하도록 만든다.
알고리즘 흐름은 전형적인 GA와 동일하게 초기 해 생성 → 교차 → 돌연변이 → 적합도 계산 → 선택 → 다음 세대로 진행된다. 다목적 특성은 적합도 계산 단계에서만 반영되며, 교차·돌연변이 연산은 기존 단일 목표 GA와 동일하게 적용한다. 따라서 구현이 간단하면서도 다목적 문제에 대한 자체 적응성을 확보한다.
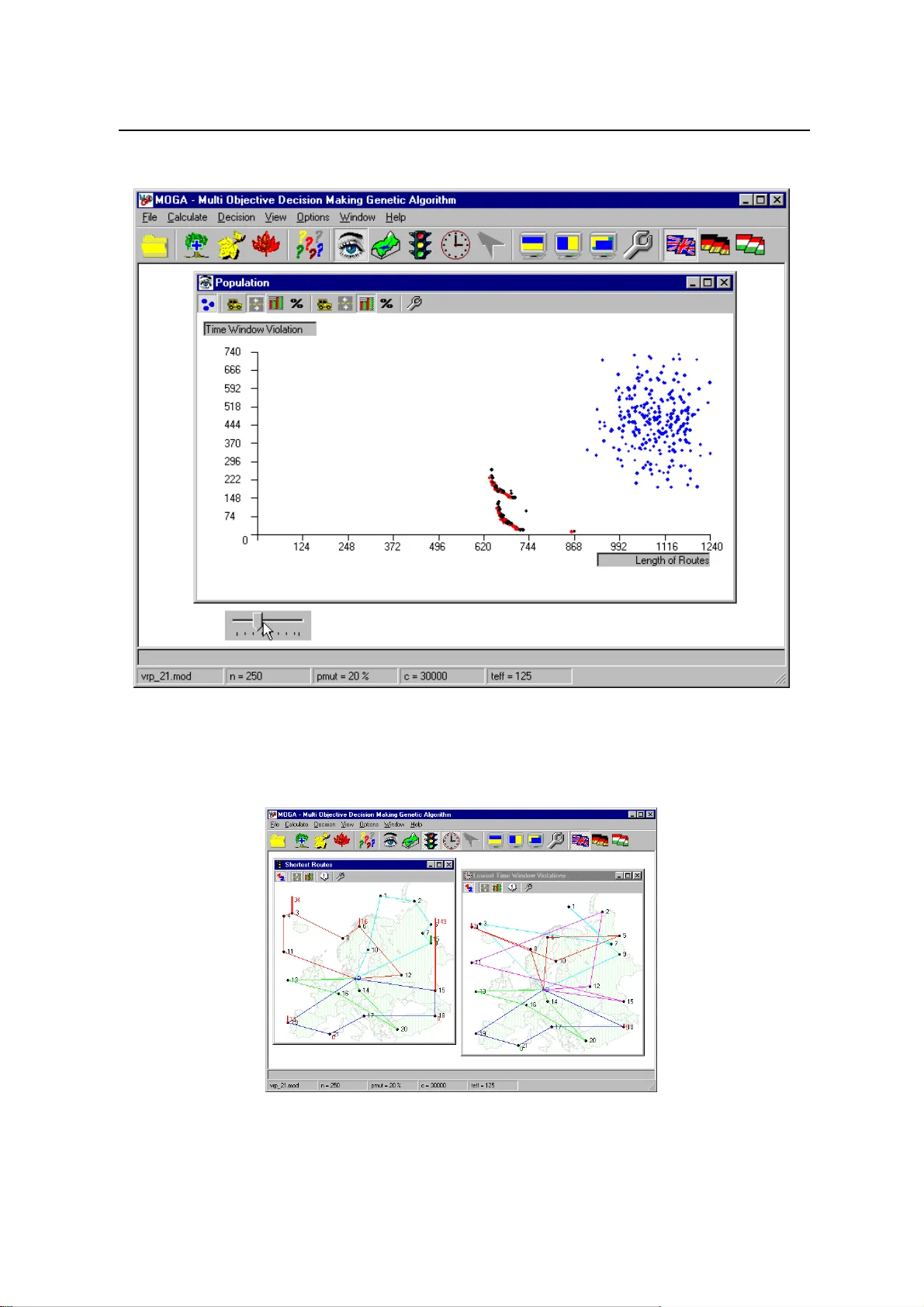
구현된 소프트웨어는 다국어 GUI를 제공한다. 사용자는 네 가지 목표(총 이동 거리 최소화, 사용 차량 수 최소화, 시간창 위반 횟수 최소화, 위반 규모 최소화)를 선택하고, 알고리즘 파라미터(인구 크기, 교차·돌연변이 확률, 세대 수 등)를 실시간으로 조정할 수 있다. GUI는 세대별 적합도 평균·최대·최소값, 현재 파레토 전선, 목표별 진화 추이를 그래프로 표시한다. 또한, 각 해에 대해 차량 경로를 지도에 시각화하고, 시간창 위반을 빨강(지연)·초록(조기 도착) 막대로 표시한다. 사용자는 2D·3D 뷰, 역방향 차트 등을 통해 목표 간 trade‑off를 직관적으로 파악할 수 있다.
실험에서는 표준 VRPTW 인스턴스를 대상으로 알고리즘을 테스트하였다. 결과는 가중합 기반 메타휴리스틱에 비해 비볼록 파레토 전선을 더 많이 탐색했으며, 특히 차량 수와 거리, 시간창 위반과 거리 사이의 상충 관계를 명확히 드러내는 해들을 제공하였다. 이는 의사결정자가 운영 정책(예: 차량 수 제한 vs. 서비스 수준) 선택에 필요한 정량적·정성적 정보를 제공한다는 점에서 실용적이다.
논문은 또한 관련 연구(다목적 GA, 파레토 정렬, 차량 라우팅 분류 등)를 검토하고, 제안 방법이 기존 방법보다 적합도 계산이 간단하고, 파라미터 튜닝이 적으며, 비볼록 해를 보존한다는 장점을 강조한다. 마지막으로, 이 소프트웨어는 2001년 유럽 학술 소프트웨어 어워드(EASA) 최종 라운드에 진출했으며, 사용자 친화적인 인터페이스와 강력한 의사결정 지원 기능이 높은 평가를 받았다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기