인간‑로봇 바이오다이내믹스 엔진
초록
**
본 논문은 인간의 근·골격계와 신경 제어를 수학적으로 모델링한 Human Biodynamics Engine(HBE)을 소개한다. SE(3) 유클리드 군을 기반으로 270개의 활성 자유도를 갖는 전신 시뮬레이터를 구현하고, Hill‑Hatze 근육 모델, 스프링‑댐퍼 기반 수동 관절, 두 단계의 신경 피드백(척수‑반사와 대뇌피질‑속도 추적) 등을 통합한다. 또한 척추·관절 부상의 원인으로 SE(3)‑jolt(힘·토크의 급격한 변화)를 제시하고, 이를 통해 부상 예측 및 예방에 활용할 수 있음을 보인다.
**
상세 분석
**
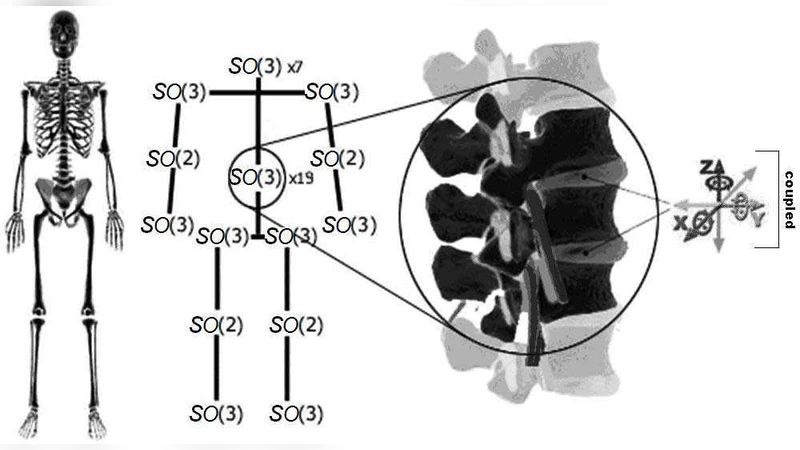
본 연구는 인간 운동을 로봇공학의 비선형 제어 이론과 결합한 획기적인 시뮬레이션 프레임워크를 제시한다. 가장 큰 특징은 구성 다양성이다. 인간 관절을 단순히 회전 자유도만을 가진 SO(3) 로 모델링하는 기존 로봇 접근법과 달리, 저자는 모든 주요 관절을 SE(3) 군으로 표현한다. 이는 회전과 동시에 미세한 병진을 포함하는 6자유도(3회전+3병진) 복합 변환을 의미한다. 따라서 각 관절은 ‘제한된’ SE(3) 로서 실제 인체의 관절면(예: 무릎, 어깨)의 미세 이동을 정밀히 재현한다.
동역학은 라그랑지안·해밀토니안 형식으로 기술되며, 구성 다양성에 따라 접선 번들(TQ)과 여접선 번들(T*Q) 위에서 Lagrange 방정식 d/dt(∂L/∂ẋ_i)−∂L/∂x_i=F_i 를 적용한다. 여기서 외력 F_i 는 근육 구동, 점성·비선형 댐핑, 그리고 외부 잡음까지 모두 포함한다. 근육 구동은 Hill‑Hatze 모델을 기반으로 하며, 근섬유의 활성화·수축을 미분 방정식 형태로 구현한다. 근육의 힘‑시간 관계는 임펄스 형태 F_imp(t)=F_0(1−e^{−t/τ}) 로 표현되어, 근섬유의 최대 토크와 시간 상수를 파라미터화한다.
신경 제어는 두 단계로 나뉜다. 1차 레벨은 척수 수준의 양성·음성 피드백으로, 근육 길이와 속도에 대한 스트레치·골리 반사를 모사한다. 2차 레벨은 대뇌피질 수준의 고차 제어로, 목표 속도와 자세를 추적하는 PD‑형(비례·미분) 제어기를 구현한다. 두 레벨은 Lie‑derivative 기반 비선형 제어 이론을 활용해 시스템의 안정성을 수학적으로 보증한다.
특히 부상 메커니즘을 ‘SE(3)‑jolt’라는 새로운 물리량으로 정의한다. 이는 6차원 힘·토크 벡터의 시간 미분, 즉 D_t(F_μ)=m_{μν}·D_t(a^ν) 로 표현되며, 크리스토펠 기호 Γ가 회전·병진 결합을 반영한다. 급격한 jolt 가 발생하면 관절의 비선형 스프링‑댐퍼가 한계치를 초과해 조직 파열이나 디스크 손상이 일어난다. 논문은 이 모델을 이용해 척추·무릎·어깨 등 주요 부위의 부상 위험을 정량화하고, 시뮬레이션 기반 예방 전략을 제시한다.
구현 측면에서는 3000개 이상의 개인 맞춤 파라미터(관절 길이, 질량, 관성, 근섬유 특성 등)를 표준 인체 데이터베이스에서 추출하고, 사용자별 입력값으로 자동 보정한다. 시뮬레이션은 전방·역방향 동역학을 모두 지원하며, 실시간 피드백 루프를 통해 가상 인간이 외부 힘에 반응하는 모습을 재현한다.
전체적으로 HBE는 인간 운동학·동역학·신경제어를 하나의 수학적 구조 안에 통합한 플랫폼이며, 로봇공학, 재활의학, 스포츠 과학, 그리고 인간‑로봇 협업 분야에 광범위한 응용 가능성을 제공한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기