양방향 세포소포 운반을 위한 끈질긴 줄다리기 메커니즘
초록
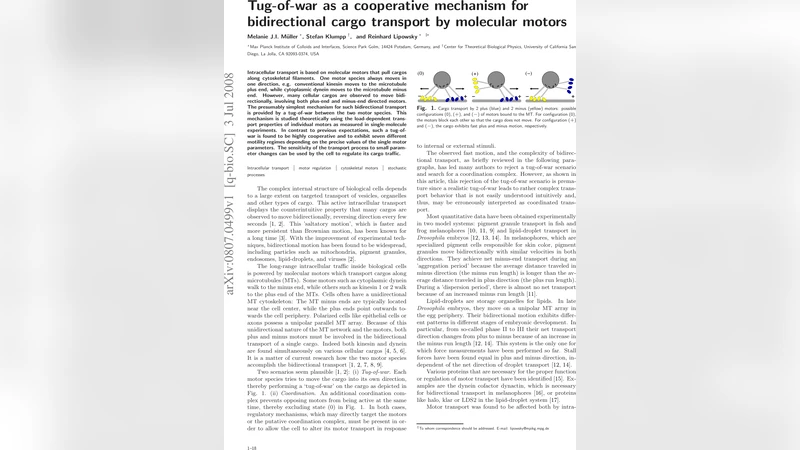
이 논문은 플러스‑엔드와 마이너스‑엔드 모터가 동시에 결합된 소포가 어떻게 줄다리기(tug‑of‑war) 현상을 통해 양방향 이동을 구현하는지를 이론적으로 분석한다. 단일 모터의 하중 의존성 데이터를 기반으로 시뮬레이션한 결과, 작은 파라미터 변화만으로도 일곱 가지 서로 다른 운동 양상이 나타나며, 이는 세포가 효율적으로 운반을 조절할 수 있는 협동 메커니즘임을 보여준다.
상세 분석
본 연구는 기존에 ‘줄다리기’가 단순히 두 종류의 모터가 서로 경쟁하는 비협조적 현상이라고 여겨졌던 관점을 뒤집는다. 저자들은 각각의 모터(키네신‑1과 사이토플라스믹 다이네인)의 힘‑속도 관계, 하중에 따른 탈착률, 그리고 스텝당 이동 거리 등 단일분자 실험에서 측정된 정량적 파라미터를 모델에 직접 입력하였다. 이때 각 모터는 동시에 여러 개가 소포에 부착될 수 있으며, 하중이 가해질 경우 탈착 확률이 비선형적으로 증가한다는 점을 반영한다. 시뮬레이션 결과는 ‘협동적 줄다리기’라는 새로운 개념을 제시한다. 즉, 모터 간의 경쟁이 단순히 승패를 가르는 것이 아니라, 전체 시스템이 특정 하중 구간에서 안정적인 정지 상태, 순방향 지속 이동, 역방향 지속 이동, 혹은 빠른 전환을 반복하는 ‘플리킹’(flipping) 상태 등 일곱 가지 뚜렷한 모드로 전이한다는 것이다. 특히, 모터 수와 결합/해리 속도 비율이 미세하게 변하면 전체 운동 양상이 급격히 바뀌는 ‘임계 전이’ 현상이 관찰된다. 이는 세포가 조절 단백질이나 포스트번역 수정으로 모터의 결합 친화도나 하중 저항성을 미세하게 조정함으로써, 필요에 따라 소포를 장거리 이동시키거나, 특정 위치에 정착시키는 등 정교한 운반 제어가 가능함을 시사한다. 또한, 모델은 실험적으로 보고된 ‘양방향 전환’ 빈도와 속도 분포를 정량적으로 재현하며, 기존에 제시된 ‘코어게이터’(coordinator) 단백질이 반드시 필요하지 않다는 점을 뒷받침한다. 이러한 결과는 세포 내 복합적인 운반 네트워크가 물리적 원리와 생화학적 조절이 결합된 다중 레이어 시스템임을 강조한다.
댓글 및 학술 토론
Loading comments...
의견 남기기