경사 타원궤도 돌출형 듀얼스핀 위성 자세 안정화 설계
초록
**
본 논문은 남반구 국가의 통신 위성 활용을 위해 경사된 타원궤도에서 운용되는 돌출형 듀얼스핀 위성의 자세 안정화 시스템을 설계한다. 주요 안정화 수단으로 De‑spin Active Nutation Damping Electronics(DANDE)를 채택하고, 고전 제어 이론을 이용해 피드백 파라미터를 튜닝한다. 시뮬레이션 결과, 롤·피치·요각 각각에 대해 30 초 이내의 감쇠가 확인되었으며, 궤도 이심률·경사각 변화에 대한 강인성도 검증하였다.
**
상세 분석
**
이 연구는 전통적으로 GEO에 배치된 돌출형 듀얼스핀 위성을 남반구의 고위도 국가가 활용할 수 있도록, 궤도 경사와 이심률을 도입한 새로운 운용 시나리오를 제시한다. 위성의 기본 구조는 회전자를 이용한 듀얼스핀 방식이며, 내부 에너지 소산에 의해 발생하는 비선형 진동을 억제하기 위해 DANDE라는 전자식 디스핀·능동 진동 감쇠 장치를 기본 안정화 수단으로 채택한다.
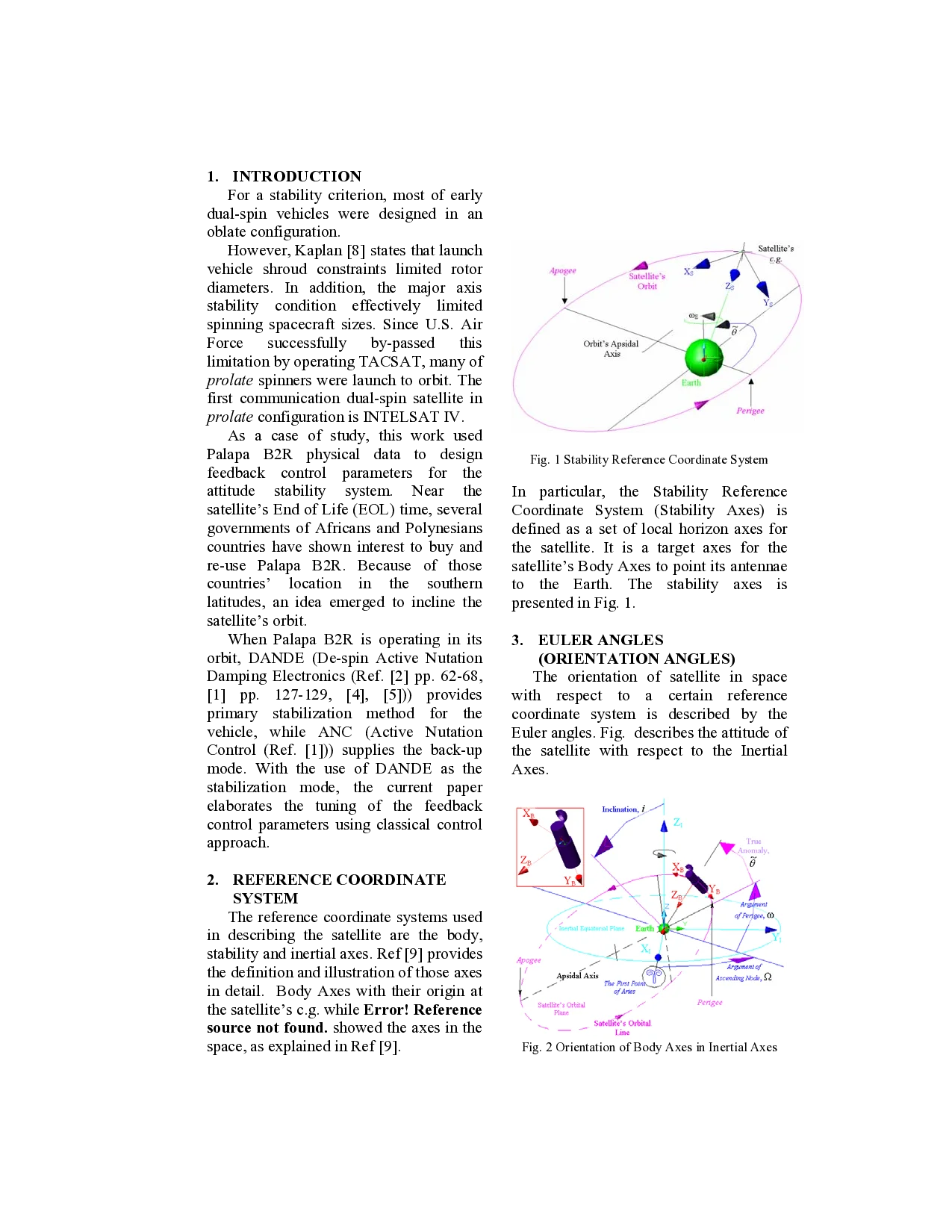
논문은 먼저 안정성 좌표계(Body, Stability, Inertial)를 정의하고, Euler 각을 이용해 자세 동역학을 기술한다. 이후 Palapa B2R 위성의 물리적 파라미터를 기반으로 상태공간 모델을 도출한다. 이 모델은 A·B 행렬로 표현되며, A 행렬의 일부 원소(A₁₄, A₂₅, A₃₅, δn 등)가 타원궤도와 경사각에 따라 시간‑변화한다는 점을 강조한다. 고전 제어 접근법을 적용하기 위해 저자들은 먼저 원형·적도 궤도에서의 고정값을 가정하고, 각 축(피치θₛ, 롤φₛ, 요ψₛ)에 대해 별도의 피드백 루프를 설계한다.
피치 제어에서는 θₛ 피드백에 대한 루트 로커스를 분석하고, 감쇠비를 높이기 위해 s+0.498 / (s+1) 형태의 보상기를 도입한다. 보상기의 전형적인 형태는 K·(s+0.498)/(s+1)이며, 이를 통해 고조파 모드의 폴을 좌측으로 이동시켜 충분한 감쇠를 확보한다. 롤 제어에서는 p‑피드백을 사용하고, 부정 피드백과 보상기 Kₚ·(s+63.25)/(s+1.4)·(s+10.5) 형태를 적용해 안정성을 확보한다. 요각 제어는 r‑피드백을 직접 적용하고, 고정 이득 Kᵣ=300을 선택해 충분한 감쇠와 빠른 응답을 얻는다.
시뮬레이션은 MATLAB/Simulink 6.5 환경에서 수행되었으며, 이심률(e=0.2)와 경사각(i=30°) 변화를 각각 적용해 10궤도 주기(≈2257 s) 동안의 자세 응답을 관찰한다. 결과는 다음과 같다. 피치 축에서는 이심률이 증가해도 θₛ 진동 진폭이 0.01° 이하로 억제되고, 감쇠 시간은 60 s 미만이다. 롤 축에서는 이심률이 진동 진폭을 약 10⁻⁴ rad 수준으로 감소시키고, 경사각 증가가 진폭을 약 10⁻⁵ rad까지 확대하나 여전히 허용 오차 내에 머문다. 요각 축에서는 이심률에 의해 장기 진동 모드가 발생하지만, 최대 편차가 10⁻⁴ rad 수준으로 제한되어 Palapa B2R의 포인팅 예산(0.047°)을 만족한다.
전체적으로, 고전 제어 기반의 피드백·보상 설계가 돌출형 듀얼스핀 위성의 자세 안정화에 충분히 효과적이며, 궤도 이심률·경사각에 대한 강인성도 확보되었다는 점이 주요 기여이다. 또한, DANDE와 ANC(보조 제어) 간의 계층적 구조가 실제 운용에서 신뢰성을 높일 수 있음을 시사한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기