블록 접촉 상태 분석을 위한 신경 퍼지와 자기 조직화 지도
본 논문은 불연속 변형 해석(DDA)에서 얻은 접촉 데이터에 신경‑퍼지 추론 시스템(NFIS)과 자기 조직화 지도(SOM)를 적용하여 블록 간 접촉 상태를 빠르게 판별하는 방법을 제안한다. 2차원 정적 블록 시스템을 대상으로 NFIS로 접촉 여부를 예측하고, SOM을 이용해 접촉 분포를 군집화·시각화하였다. 실험 결과 두 기법 모두 접촉 상태를 높은 정확도로 식별했으며, 규칙 수와 MF 개수를 조절함에 따라 정확도와 연산 비용 사이의 트레이드오…
저자: H.Owladeghaffari
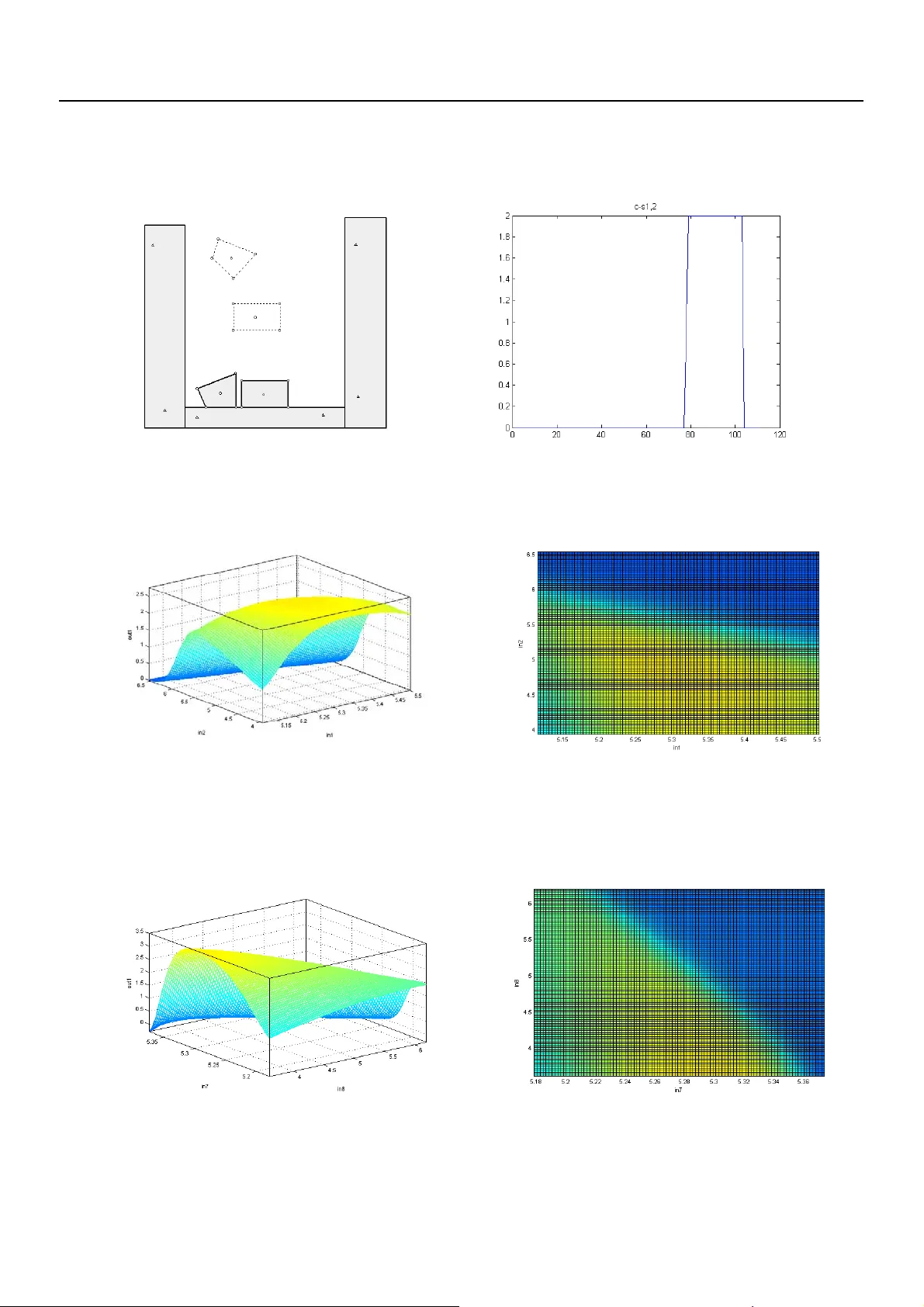
본 논문은 블록 시스템에서 접촉 상태를 효율적으로 판별하기 위해 두 가지 소프트 컴퓨팅 기법, 즉 신경‑퍼지 추론 시스템(NFIS)과 자기 조직화 지도(Self‑Organizing Map, SOM)를 적용한 연구이다. 접촉 검출은 두 개 이상의 기하학적 객체가 정적 혹은 동적 환경에서 서로 간섭하는지를 판단하는 문제이며, 특히 불연속 변형 해석(Discrete Deformation Analysis, DDA)에서는 접촉 여부와 겹침 정도를 정확히 계산하는 것이 계산 비용이 크게 소요되는 병목 현상으로 작용한다. 이를 해결하고자 저자는 먼저 DDA를 이용해 블록의 정점 좌표와 면적 등 18개의 입력 변수를 추출하고, 100개의 학습 샘플과 50개의 검증 샘플을 구성하였다.
NFIS는 TSK 모델을 기반으로 한 ANFIS 구조를 사용한다. 입력 변수마다 Gaussian 형태의 멤버십 함수(MF)를 정의하고, 서브트랙티브 클러스터링을 통해 데이터 밀도가 높은 영역에 중심을 두어 MF와 규칙을 자동 생성한다. 논문에서는 MF를 13개와 39개 두 경우로 설정했으며, 각각 13개와 39개의 규칙이 도출되었다. 각 규칙은 “If x₁ is A₁ and x₂ is A₂ … then y = p₀ + Σ p_j x_j” 형태의 선형 결합을 갖는다. 학습 과정에서는 퍼지 전제의 강도와 선형 파라미터를 동시에 최적화하여, 입력 공간을 비선형적으로 매핑하고 최종적으로 0(접촉 없음), 1(V‑V), 2(V‑E), 3(E‑E) 네 가지 접촉 코드를 크리스프하게 출력한다. 실험 결과, MF 수를 늘릴수록 모델의 예측 정확도가 향상되었지만, 연산량도 증가함을 확인하였다. 특히, 규칙 수가 과다하면 과적합 위험이 존재함을 지적하고, 규칙 삭제 시 정확도가 감소하는 현상을 보고하였다.
SOM 부분에서는 Kohonen 자기 조직화 네트워크를 3×3 격자(총 9개의 뉴런)로 설계하고, 300 epoch 동안 학습시켰다. 입력으로는 블록의 무게 중심 좌표(X, Y)와 접촉 상태 코드를 사용하였다. SOM은 경쟁 학습을 통해 승자 뉴런을 선정하고, 승자 주변의 가중치를 입력 벡터 방향으로 이동시켜 데이터의 토폴로지를 보존한다. 결과적으로, SOM은 고차원 입력을 2차원 격자에 투영함으로써 접촉 상태의 전반적인 분포를 시각화하고, 특정 “윈도우” 영역 내에서 접촉 패턴을 빠르게 파악할 수 있게 한다. 저자는 SOM과 NFIS를 결합하는 절차를 제시했으며, 이는 먼저 NFIS로 각 블록 쌍의 접촉 여부를 예측하고, 그 결과를 SOM에 입력해 전체 도메인에 대한 근사적인 접촉 맵을 생성하는 방식이다. 이 과정은 셀룰러 오토마타와 연계하여 블록 군집화를 수행하고, DDA 흐름도에 삽입하는 미래 연구 방향을 제시한다.
논문의 결론에서는 NFIS와 SOM을 활용한 두 단계의 접근법이 DDA 기반 접촉 검출의 계산 비용을 크게 절감하면서도 높은 정확도를 유지한다는 점을 강조한다. 또한, 퍼지 규칙을 셀룰러 오토마타에 적용하고, 블록 군집화를 정보 입자화(Information Granulation) 기법으로 확장하는 연구가 향후 진행될 예정이라고 밝히었다. 다만, 현재 실험이 2차원 정적 사례에 국한되어 있어 동적·3차원 시스템에 대한 적용 가능성을 검증해야 하며, MF와 규칙 수 선택에 대한 자동 최적화 방법이 추가로 필요함을 인정한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기