RST와 NFIS를 활용한 투수성 그래픽 추정
본 논문은 셰이바산 댐의 루게온 시험 데이터를 대상으로, 자기조직지도(SOM)로 전처리한 뒤, 거친집합이론(RST)과 적응형 신경‑퍼지 추론시스템(NFIS)을 결합한 SONFIS‑R 모델을 적용하여 투수성 변화를 규칙 기반으로 추출하고, 두 방법의 결과를 비교·시각화한다.
저자: H.Owladeghaffari, K.Shahriar W. Pedrycz
서론에서는 댐 구조 설계 시 투수성 변동을 정확히 예측하는 것이 중요함을 강조하고, 기존에 사용되던 확률론·베이지안 방법이 현장 데이터의 불확실성과 희소성에 취약함을 지적한다. 이를 보완하기 위해 거친집합이론(RST)과 퍼지 이론(FST)을 결합한 하이브리드 접근법을 제안한다.
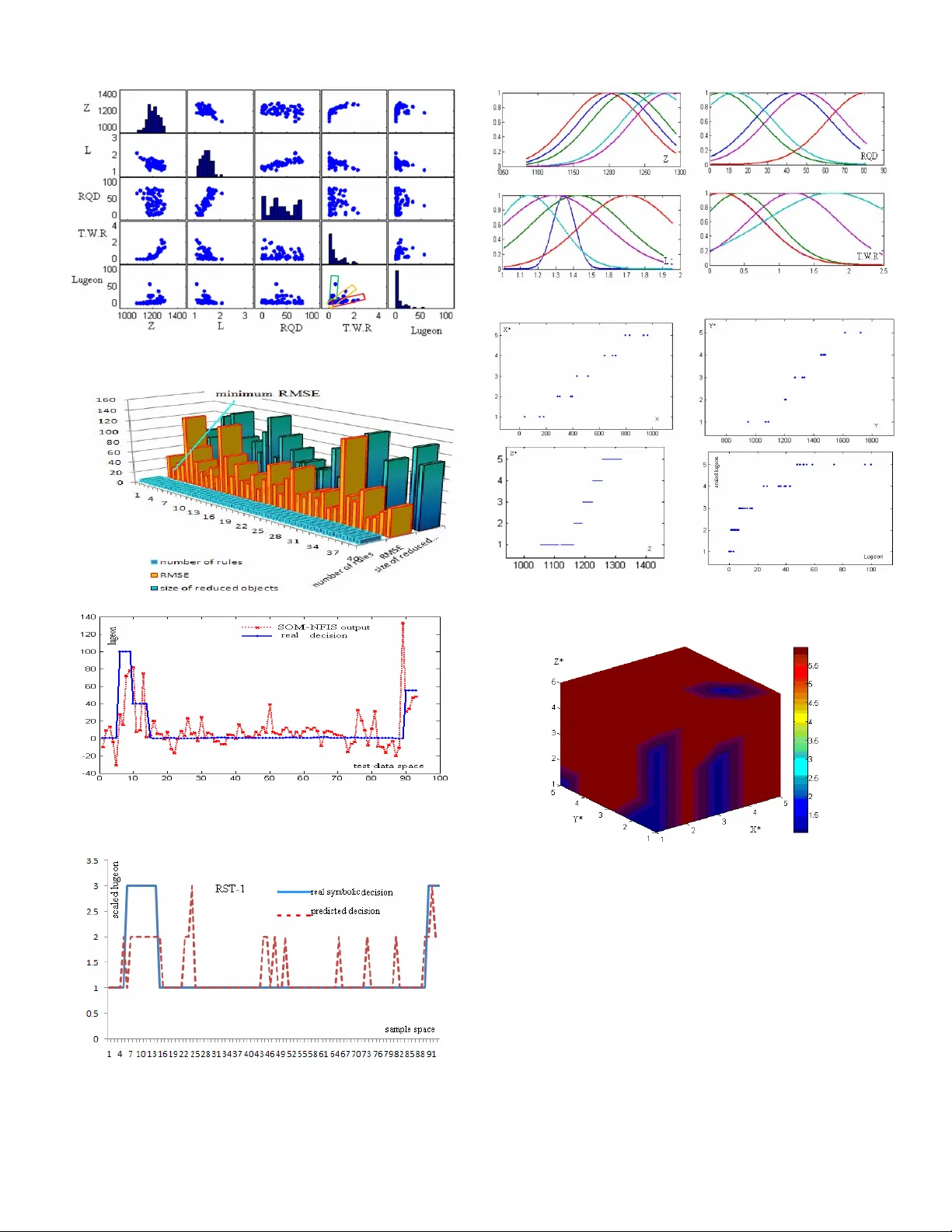
연구 대상은 이란 서북부에 위치한 셰이바산 댐으로, 20개의 시추공에서 789개의 루게온 시험 데이터를 수집하였다. 루게온 값은 물이통과량(리터/미터·분)과 시험 압력(바)으로 정의되며, 일반적으로 100을 초과하면 고투수성으로 판단한다. 데이터 전처리 단계에서 63개의 뉴런을 갖는 자기조직지도(SOM)를 500 epoch 동안 학습시켜 7×9 격자 형태의 크리스프 그라뉼을 생성하였다. 이 격자는 이후 RST와 NFIS가 다루기 쉬운 형태의 입력 집합으로 변환한다.
거친집합이론 파트에서는 정보 시스템 S=를 정의하고, 속성 집합 A는 {위치 X, Y, Z, 루게온, 암석 등급 등}으로 구성한다. 판별 행렬 M(S)를 통해 속성 간 상관관계를 정량화하고, 하한·상한 근사치를 이용해 5~8개의 핵심 규칙을 도출하였다. 예를 들어 “Z가 1150~1200m이고 루게온이 80~100이면 투수성은 중간”과 같은 규칙이 생성되었다. 이러한 규칙은 전문가가 직접 해석 가능한 형태이며, 규칙 기반 시스템의 투명성을 확보한다.
신경‑퍼지 추론시스템(NFIS) 파트에서는 TSK 모델을 채택하고, 각 입력 변수에 대해 가우시안 멤버십 함수를 3개씩 설정하였다. SOM에서 얻은 크리스프 그라뉼을 초기 퍼지 규칙의 씨드로 활용하고, 폐‑열림 연산을 통해 규칙 수와 뉴런 성장률을 조정한다. 실험에서는 최대 8개의 규칙과 10회의 폐‑열림 반복을 적용했으며, 최종 RMSE는 0.021로 수렴하였다. NFIS는 연속적인 퍼지 추론을 통해 데이터의 미세한 변동까지 포착한다.
비교 분석에서는 두 방법의 결과를 3D Iso‑surface와 색상 매핑으로 시각화하였다. RST는 보수적인 경향으로 고투수성 구역을 일부 누락했으나, 규칙이 명확하고 해석이 쉬웠다. 반면 NFIS는 고투수성 영역을 더 넓게 식별하고, Z=2 구간에서 다중 서브레벨을 구분하는 등 세부적인 변동을 반영했다. 특히, RST가 제공하지 못한 “루게온 값이 70~80이면서 Z가 1160~1180m인 경우”와 같은 복합 조건을 NFIS가 효과적으로 모델링하였다.
결론에서는 SOM‑기반 전처리, RST와 NFIS의 병행 적용, 그리고 폐‑열림 연산을 통한 규칙 최적화가 댐 투수성 평가에 있어 데이터 불확실성을 효과적으로 관리할 수 있음을 강조한다. 또한, 열린 세계(Open World)와 닫힌 세계(Close World) 가정을 명시적으로 구분함으로써, 정보가 부족한 상황에서도 합리적인 추론이 가능함을 입증한다. 향후 연구에서는 더 큰 규모의 지질 데이터와 실시간 센서 데이터를 통합하여, 실시간 투수성 모니터링 시스템을 구축하는 방향을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기