다변량 동적 선형 모델의 공분산 추정 혁신
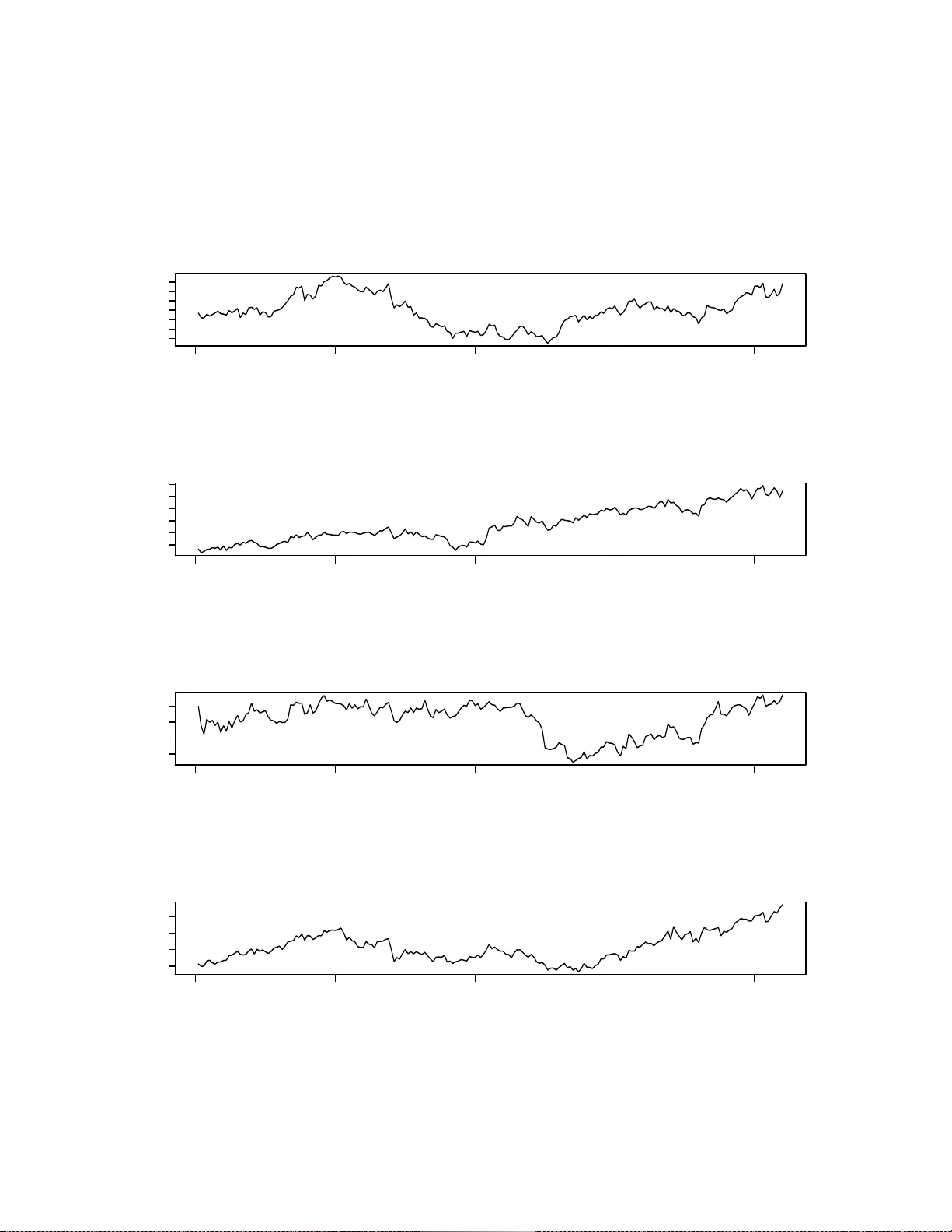
본 논문은 다변량 조건부 가우시안 동적 선형 모델(DLM)에서 관측 혁신 공분산 행렬 Σ를 실시간으로 추정하는 비반복 베이지안 알고리즘을 제안한다. 제안 방법은 Kalman 필터와 결합해 온라인으로 Σ의 사후 평균을 업데이트하며, 시뮬레이션과 비순차적 Monte Carlo(골드 스탠다드) 결과와의 비교를 통해 높은 정확도와 빠른 수렴을 확인한다. 또한 VAR 및 시간 가변 VAR 모델에 적용해 영국 금속 거래소(LME) 데이터(알루미늄, 구리,…
저자: ** K. Triantafyllopoulos (University of Sheffield, 영국) **
본 논문은 다변량 시계열 분석에서 핵심적인 문제인 관측 혁신 공분산 행렬 Σ의 실시간 추정을 목표로 한다. 기존 연구는 주로 단변량 DLM에 국한되었거나, 다변량 경우에도 행렬‑변량 DLM, 베이지안 역위시트 사전, 혹은 반복적 최대우도·MCMC 방법에 의존해 계산 복잡도가 급격히 증가한다는 한계를 가지고 있었다. 이러한 배경에서 저자는 일반적인 다변량 조건부 가우시안 DLM yₜ = F′θₜ + εₜ, θₜ = Gθₜ₋₁ + ωₜ(식 1)를 전제로, Σ를 비반복 베이지안 방식으로 추정하는 새로운 알고리즘을 제시한다.
핵심 이론은 Theorem 1에 의해 뒷받침된다. Σ가 유계이고 사전 평균 S₀와 자유도 n₀를 지정하면, 시점 t 까지의 관측 정보를 이용해 Σ의 사후 평균 Sₜ를 다음과 같이 근사한다.
Sₜ ≈ (1/(n₀ + t))
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기