스무딩의 진정한 차원 필터보다 두 배 높은 타입으로 정착오차 최소화
본 논문은 변분법과 오일러‑라그랑주 방정식을 이용해 선형 비인과 추정기(스무더)의 정상 상태 오차를 분석한다. n 차 모델에 설계된 스무더는 입력이 다항식일 때, 정상 상태 오차 면에서 2n 차 필터와 동일한 성능을 보이며, 이는 칼만 필터 대비 오차가 크게 감소함을 의미한다. 결과는 스무딩이 모델 불확실성에 대한 강인성을 크게 향상시킴을 보여준다.
저자: D. Ezri, B.Z. Bobrovsky, Z. Schuss
1. 서론
논문은 제어 이론에서 정상 상태 오차가 시스템 타입에 의해 결정된다는 고전적 결과를 소개한다. 순수 적분기가 n 개인 전이함수는 ‘type‑n’이라 불리며, 다항식 입력 a·t^{p‑1}/(p‑1)!에 대해 p≤n이면 영 오차, p=n+1이면 일정 오차, 그 이상이면 추적 불가라는 특성을 가진다. 칼만 필터는 n 차 모델에 대해 설계될 때 내부적으로 type‑n 폐루프를 형성한다는 점을 강조한다. 그러나 비인과 추정기, 즉 스무더에 대한 정상 상태 오차 분석은 기존 문헌에 거의 다루어지지 않았다.
2. 수학적 사전지식
선형 시스템(3)과 측정식(3)을 바탕으로 최소 평균제곱(MMSE) 추정 문제를 변분 형태(4‑5)로 정의한다. 여기서 목적함수는 측정 잡음과 프로세스 잡음의 에너지를 포함한다. 백색 잡음의 비정규성을 피하기 위해 넓은 대역 잡음으로 근사한 뒤 백색 잡음 한계로 전환한다.
3. 오일러‑라그랑주 방정식과 스무더 구조
목적함수에 대한 변분을 수행하면 오일러‑라그랑주 방정식(6)이 도출된다. 이는 두 점 경계값 문제이며, 전방 방정식은 표준 칼만 필터(8‑9)와 동일하고, 후방 방정식은 필터 추정값을 역시간으로 ‘스윕’하는 형태(10‑11)이다. 전방‑후방 피드백 구조는 각각 type‑n 전이함수를 갖고, 후방 방정식 역시 type‑n 특성을 유지한다.
4. 칼만 필터의 정상 상태 오차 분석
n 차 모델(12)을 기반으로 칼만 필터는 (13‑15)식으로 표현된다. 이 필터는 입력이 a·t^{m}/m! 형태일 때, m=0(오프셋)에서는 일정 오차, m>0에서는 오차가 무한히 증가한다는 전통적인 결과를 재확인한다.
5. 스무더의 정상 상태 오차 분석
스무더가 n 차 모델에 대해 설계되었다고 가정하고, 입력 신호에 다항식 a·t^{m}/m!를 추가한다(17‑18). 잡음이 없는 결정론적 상황을 고려해 오차 동역학을 전개한다. 오차와 라그랑주 승수에 대한 연립 방정식(21‑22)을 풀어 정상 상태 조건을 적용하면 λ_n=−2a·t^{m}이 얻어지고, 재귀적으로 λ_k를 구한다. 최종적으로 e_1(정상 상태)값은 (25)식에 따라 mn이면 해가 존재하지 않는다. 이는 스무더가 ‘type‑2n’ 필터와 동일한 정상 상태 오차 특성을 가짐을 의미한다.
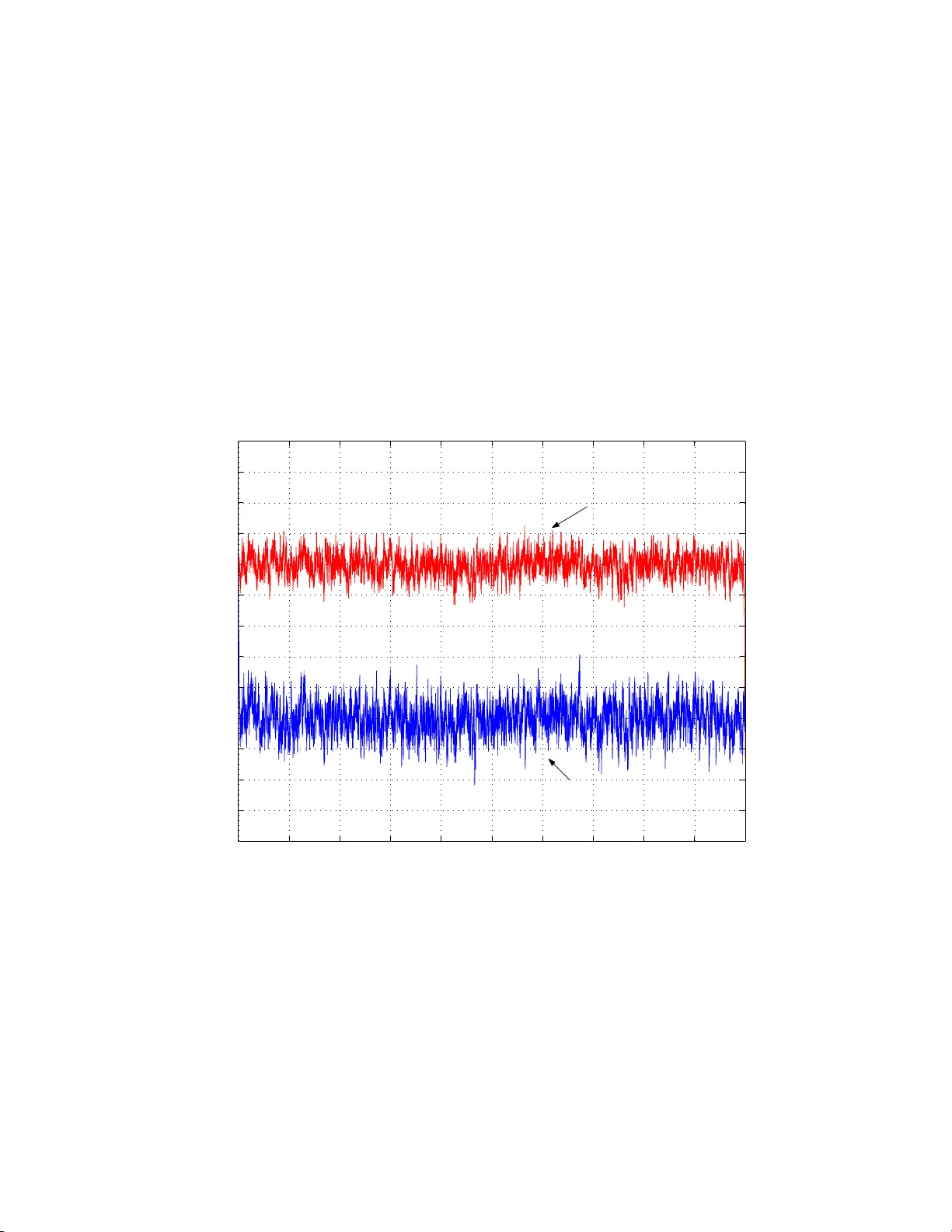
6. 시뮬레이션 및 그래프
그림 1‑3은 1차 스무더와 1차 필터를 각각 오프셋 입력과 2차 다항식 입력에 대해 비교한다. 스무더는 오프셋에서 오차가 전혀 없으며, 2차 입력에서는 일정한 오차만 남는다. 반면 필터는 오프셋에서 일정 오차가 발생하고, 2차 입력에서는 오차가 발산한다. 또한, 오차 분산 측면에서도 스무더가 필터보다 낮은 값을 유지한다.
7. 논의 및 결론
스무더는 모델 차수와 실제 입력 차수 사이의 불일치에 대해 높은 강인성을 제공한다. 특히, 신호 특성이 시간에 따라 변하거나 정확한 모델 정보가 부족한 경우, 스무더는 필터 대비 두 배 높은 타입을 갖는 특성으로 정상 상태 오차를 크게 감소시킨다. 이는 설계자가 전통적인 ‘정착 오차 vs 잡음 분산’ 트레이드오프를 완화할 수 있음을 의미한다. 저자들은 비선형 스무딩에도 동일한 접근법을 적용할 계획이며, 선형 스무더가 제공하는 강인성은 실제 엔지니어링 시스템에서 큰 장점이 될 것이라고 주장한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기