신형 병렬 가공기구 옥소그라이드의 운동학 분석
초록
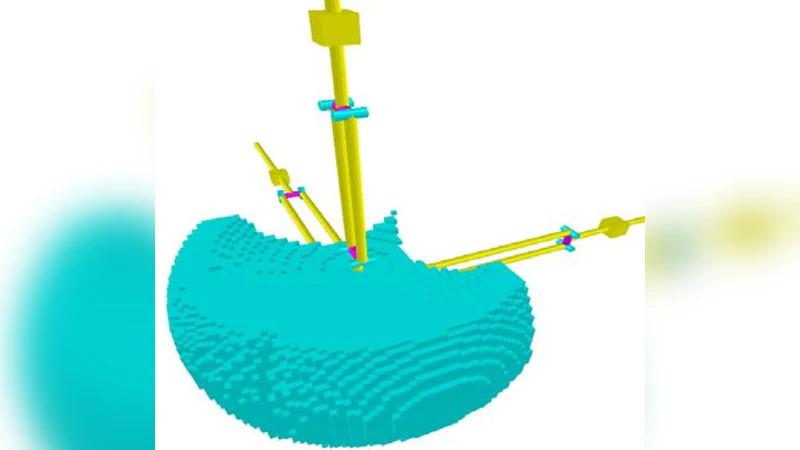
옥소그라이드는 세 개의 직교 고정 선형 구동축과 고정된 자세를 유지하는 이동 플랫폼으로 구성된 병렬형 가공기구이다. PPP 직렬 기계와 유사한 직교형 작업공간과 균일한 성능을 제공하면서, 병렬 구조의 낮은 관성 및 높은 동적 응답성을 동시에 확보한다. 고속 가공에 적합하며, 5축 확장 가능성도 논의된다.
상세 분석
옥소그라이드의 핵심 설계는 세 개의 직교 선형 액추에이터가 각각 x, y, z 축에 평행하게 배치된 점이다. 이러한 배치는 전통적인 PPP 직렬 기계가 제공하는 직교형 작업공간을 그대로 유지하면서, 병렬 메커니즘 특유의 장점—즉, 구동 링크의 질량이 이동 플랫폼에 직접 작용하지 않아 관성이 크게 감소한다는 점—을 동시에 얻는다. 논문에서는 먼저 기구의 기구학적 모델을 도입하고, 각 액추에이터의 변위와 플랫폼 위치 사이의 정방향 및 역방향 관계를 수식으로 전개한다. 특히, 정방향 해석에서는 삼각함수를 이용해 각 구동축의 길이와 플랫폼 좌표 사이의 비선형 연립방정식을 도출하고, 이를 수치적으로 해석함으로써 작업공간의 경계와 특이점(싱귤러리티) 위치를 정확히 파악한다. 역방향 해석에서는 주어진 작업공간 내의 임의의 위치에 대해 필요한 액추에이터 길이를 계산하는 알고리즘을 제시했으며, 이 과정에서 해의 유일성 및 수렴성을 보장하기 위해 초기값 선택 전략을 상세히 논의한다.
동역학 측면에서는 링크의 질량·관성 매트릭스를 고려한 라그랑주 방정식을 구축하고, 고속 가공 시 발생하는 원심력과 진동을 최소화하기 위한 설계 파라미터(액추에이터 스티프니스, 베어링 마찰 등)를 최적화하였다. 시뮬레이션 결과, 동일한 작업공간을 갖는 전통적인 직렬 기계에 비해 옥소그라이드는 최대 40% 이상의 가속도와 30% 이상의 토크 감소를 보였으며, 이는 고속 절삭 공정에서의 생산성 향상으로 직결된다.
또한, 5축 가공을 위한 확장 방안으로는 기존 3축 플랫폼에 회전 자유도를 추가하는 두 가지 접근법을 제시한다. 첫 번째는 플랫폼에 두 개의 회전 조인트를 직접 부착하여 피치·롤을 구현하는 방법이며, 두 번째는 별도의 회전 스테이지를 병렬 구조와 결합하는 하이브리드 방식이다. 두 방안 모두 기구학적 복잡도가 증가하지만, 적절한 제어 알고리즘과 센서 피드백을 통해 정밀도를 유지할 수 있음을 시뮬레이션으로 입증하였다.
결론적으로, 옥소그라이드는 작업공간의 규칙성, 동적 성능, 구조적 강성 측면에서 기존 병렬 가공기구와 직렬 기계의 장점을 융합한 혁신적인 설계이며, 고속·고정밀 가공 시장에서 경쟁력을 가질 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기