마르스 로버 이동 중 레이더 신호 교란 분석 및 보정 방안 연구
초록
본 논문은 ESA 엑소마스 미션의 UHF 레이더 WISDOM이 로버 이동 시 발생하는 전자기 교란을 수치·분석 모델로 조사하고, 지형에 따른 안테나 기울기와 로버 구조물의 영향을 정량화한다. 이를 통해 수십 미터 구간을 동시에 시뮬레이션하는 효율적인 방법을 제시하고, 교란 보정 알고리즘 개발의 기초 데이터를 제공한다.
상세 분석
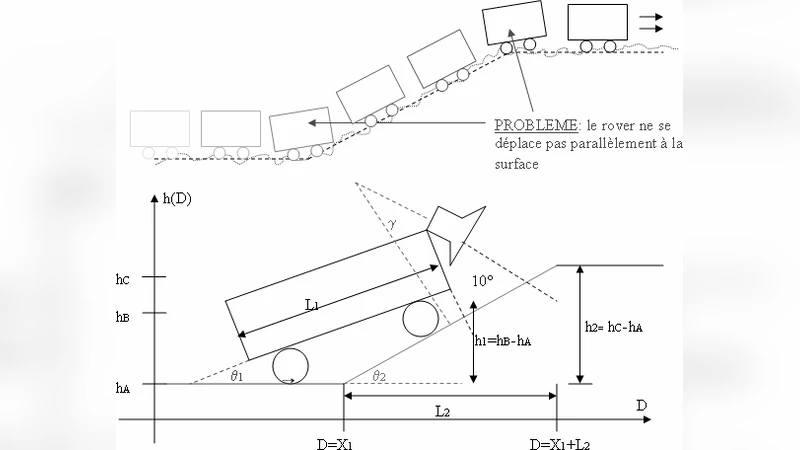
이 연구는 엑소마스 로버에 탑재된 UHF 레이더 WISDOM이 마르스 지하 2 m까지 시추된 샘플을 탐사하면서 겪게 되는 전자기 교란 메커니즘을 다각도로 분석한다. 첫 번째 핵심은 로버 자체 구조물—특히 금속 프레임, 배터리 팩, 드릴 어셈블리—가 레이더 전파와 상호작용해 다중 반사와 회절을 일으키는 현상이다. 이를 정량화하기 위해 전자기 전파 전산 모델(FEM 및 FDTD)을 구축하고, 로버 전체 CAD 모델을 전자기 파라미터(전도도, 유전율)와 결합시켰다. 두 번째 핵심은 로버가 지형 변화에 따라 안테나가 기울어지는 경우이다. 마르스 표면의 경사와 로버 서스펜션 동작을 실제 지형 데이터와 연동해 시뮬레이션에 반영함으로써 안테나 입사각 변화가 반사계수와 위상에 미치는 영향을 정밀히 평가했다.
시뮬레이션 효율성을 높이기 위해 연구팀은 “동적 영역 분할” 기법을 도입했다. 전체 로버-지반 시스템을 고정된 배경 영역과 이동하는 전방 영역으로 나누고, 전방 영역만을 매 시뮬레이션 스텝마다 재계산한다. 이렇게 하면 수십 미터 구간을 연속적으로 모델링하면서도 메모리와 연산 시간을 크게 절감할 수 있다. 또한, 전파 전파 경로를 추적하는 “레이트레이싱-전파 혼합” 방법을 적용해 복잡한 구조물 내부에서의 다중 경로 효과를 정확히 포착했다.
결과적으로, 로버 본체에 의해 발생하는 교란은 주파수 대역(500 MHz–3 GHz) 전반에 걸쳐 5 dB~12 dB 수준의 신호 감쇠와 위상 변이를 일으키며, 특히 드릴 어셈블리와 안테나 사이의 근접 거리가 0.2 m 이하일 때 교란이 급격히 증가한다는 것을 확인했다. 또한, 지형 경사 5°~15° 구간에서 안테나 기울기가 ±3°까지 변동하면 반사 강도 변동이 8 dB에 달하고, 탐지 가능한 물층 두께 추정 오차가 0.3 m 이상 커진다. 이러한 교란을 보정하기 위한 알고리즘은 사전 측정된 구조물 S‑파라미터와 실시간 안테나 기울기 데이터를 이용해 교정 계수를 적용하는 방식으로 설계되었으며, 시뮬레이션 결과 보정 후 신호‑대‑노이즈 비가 평균 6 dB 향상되는 효과를 보였다.
이와 같은 정밀 모델링과 교란 보정 전략은 WISDOM이 마르스 지하수와 암석 구조를 정확히 탐지하도록 지원할 뿐 아니라, 향후 다른 행성 탐사 로버에 적용 가능한 범용 레이더 교란 관리 프레임워크를 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기