관찰적 의미론으로 보는 프로로그 박스 모델
초록
본 논문은 프로로그 트레이서의 동작을 구현에 의존하지 않는 관찰적 의미론으로 정의하고, 전통적인 Byrd 박스 모델을 형식적으로 재구성한다. 트레이스의 구조와 의미를 명확히 함으로써 교육 및 트레이서 구현에 활용할 수 있는 선언적 사양을 제시한다. 또한 박스 모델의 장점과 한계를 분석하고, 트레이스만으로 관찰 대상 프로세스를 복원하는 일반적 문제를 논의한다.
상세 분석
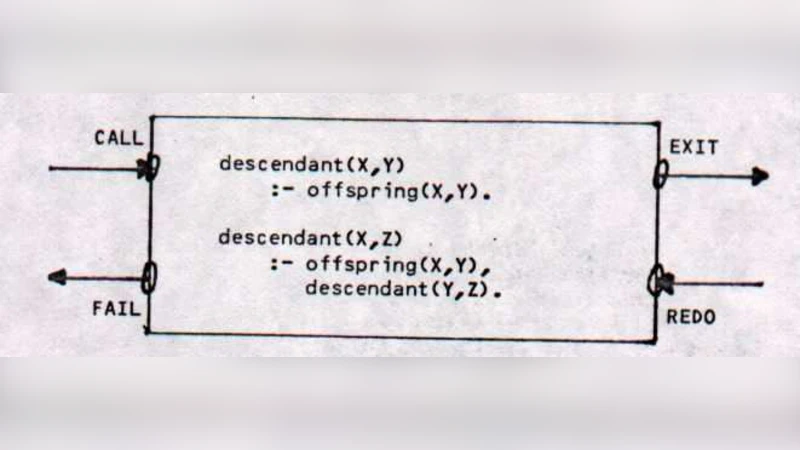
논문은 먼저 프로로그 실행 과정에서 발생하는 4가지 기본 이벤트(Call, Exit, Redo, Fail)를 “박스”라는 추상적 단위에 매핑한다는 전통적 Byrd 모델을 소개한다. 기존 트레이서는 이러한 이벤트를 단순히 텍스트 라인으로 출력하지만, 의미론적 해석이 부족해 사용자가 트레이스의 흐름을 직관적으로 파악하기 어렵다. 저자는 이를 보완하기 위해 “관찰적 의미론(observational semantics)”이라는 프레임워크를 도입한다. 관찰적 의미론은 실행 시스템을 ‘관찰자(observer)’와 ‘관찰 대상(observed process)’로 구분하고, 관찰자는 오직 트레이스라는 시퀀스만을 통해 내부 상태를 추론한다는 전제 하에 정의된다.
핵심 기여는 다음과 같다. 첫째, 트레이스의 각 라인을 형식화된 전이 규칙으로 표현함으로써, 트레이스 자체가 실행 의미를 완전하게 기술하도록 만든다. 예를 들어, Call 이벤트는 현재 목표(goal)를 스택에 푸시하고, 환경(environment) 정보를 기록하는 전이 규칙으로 서술된다. Exit, Redo, Fail 역시 각각 스택 팝, 백트래킹, 실패 처리와 같은 구체적 상태 변화를 규정한다. 둘째, 이러한 전이 규칙을 기반으로 트레이스가 “완전성(fullness)”을 만족하는지 검증하는 메타-조건을 제시한다. 완전한 트레이스는 관찰자가 실행 흐름을 손실 없이 재구성할 수 있음을 의미한다. 셋째, 박스 모델의 한계—특히 비선형 제어 흐름, 제약 논리 프로그래밍, 그리고 고급 최적화(예: 제자리 인라인) 등—에 대해 형식적 분석을 제공한다. 이러한 경우 기존 4가지 이벤트만으로는 충분히 설명되지 않으며, 추가적인 메타-이벤트나 확장된 박스 구조가 필요함을 논증한다.
또한 논문은 관찰적 의미론이 구현 독립적이라는 점을 강조한다. 즉, WAM(워털리 추상 기계) 기반 구현이든, JIT(Just‑In‑Time) 컴파일러이든, 혹은 논리식 기반 인터프리터이든 관계없이 동일한 트레이스 사양을 적용할 수 있다. 이는 교육용 도구 설계 시 학생들이 구현 세부 사항에 얽매이지 않고 논리 흐름 자체에 집중하도록 돕는다. 마지막으로, 트레이스에서 정보 손실을 최소화하기 위한 설계 원칙—예: 이벤트 순서 보존, 스코프 정보 명시, 변수 바인딩 상태 기록—을 제시하고, 이를 실제 Prolog 시스템에 적용한 사례를 간략히 제시한다. 전체적으로 이 논문은 트레이스라는 관찰 수단을 정형화함으로써, 프로로그 디버깅과 교육, 그리고 트레이서 구현에 새로운 이론적 기반을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기