바닥도면을 지식그래프로 변환해 시각장애인 실내 길찾기 지원
📝 원문 정보
- Title: 바닥도면을 지식그래프로 변환해 시각장애인 실내 길찾기 지원
- ArXiv ID: 2512.12177
- 발행일:
- 저자: Unknown
📝 초록 (Abstract)
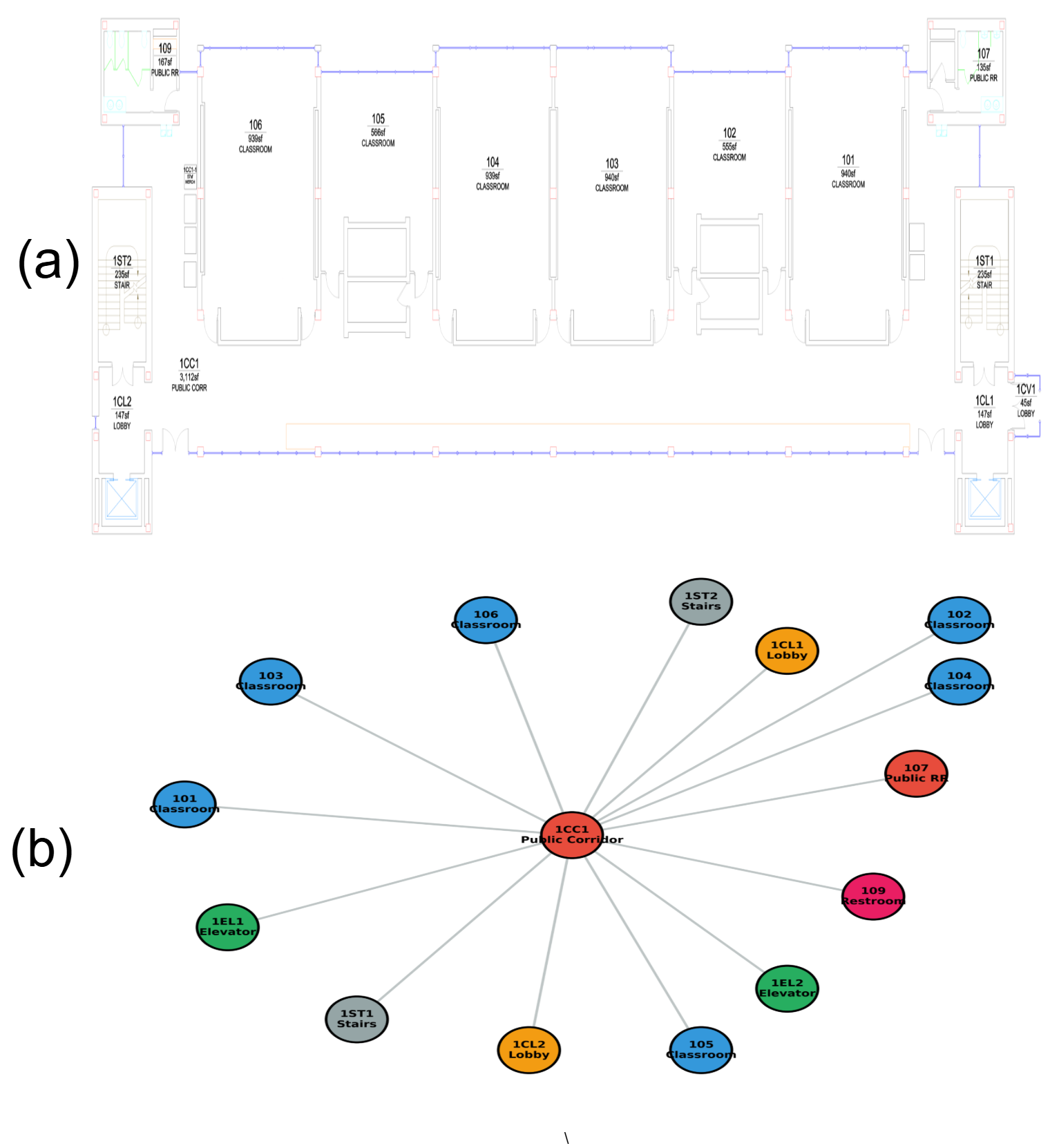
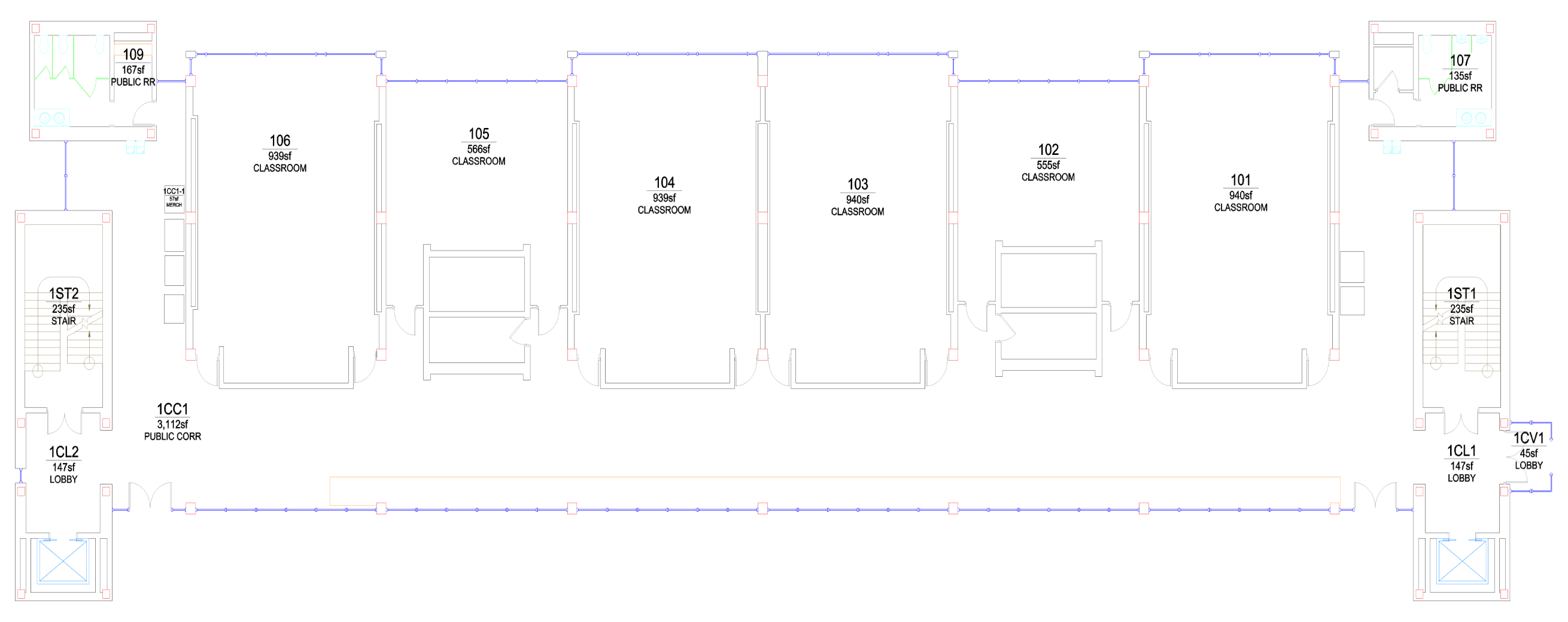
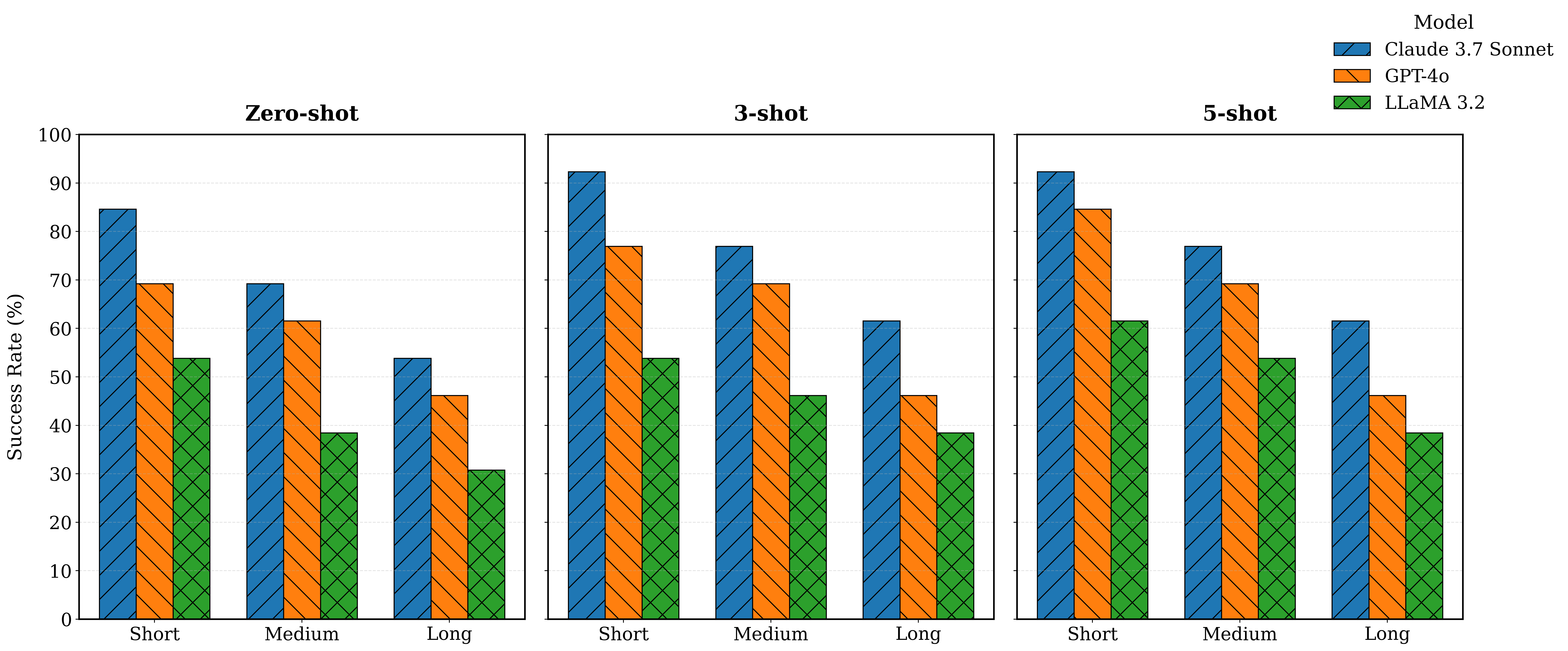
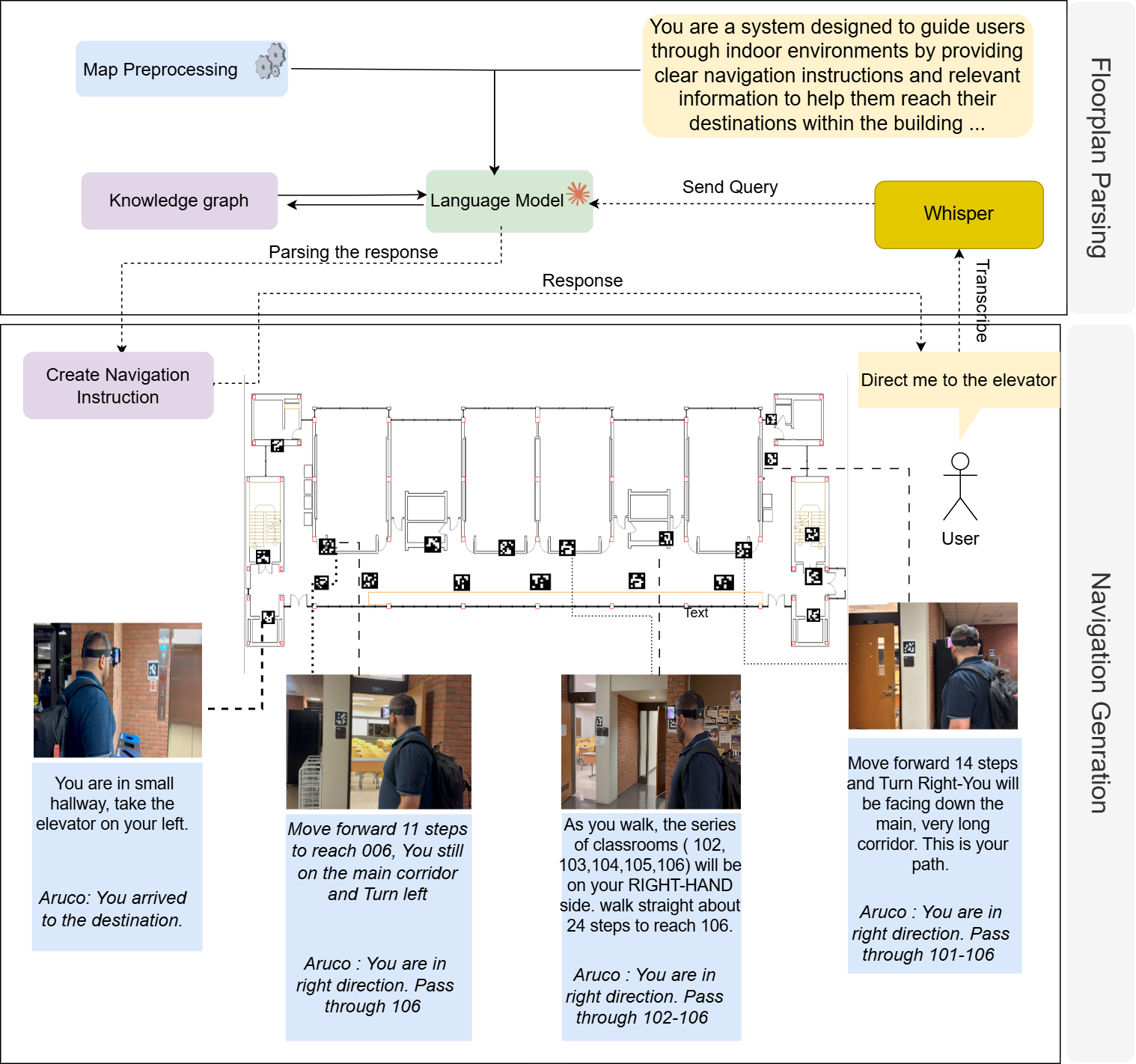
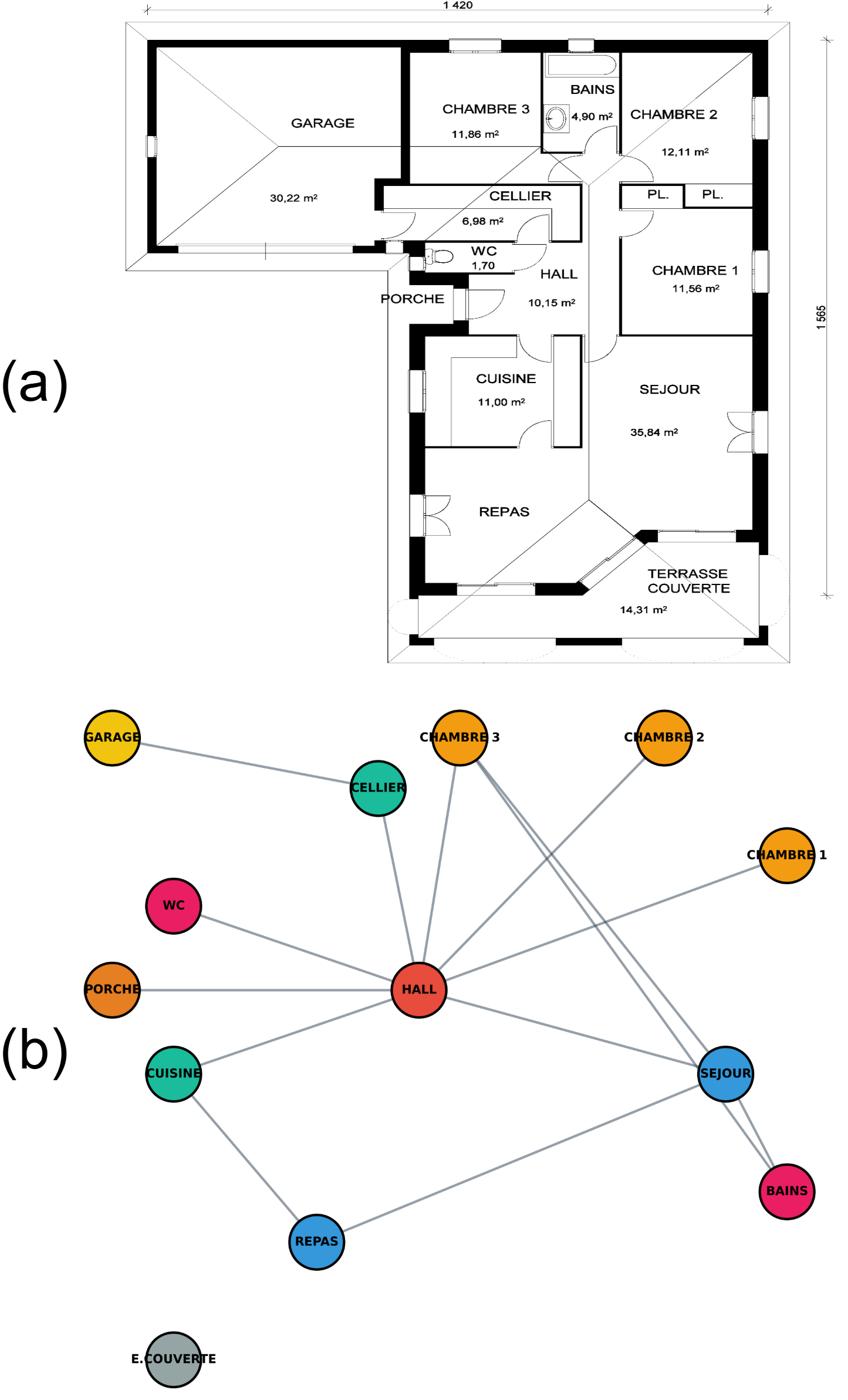
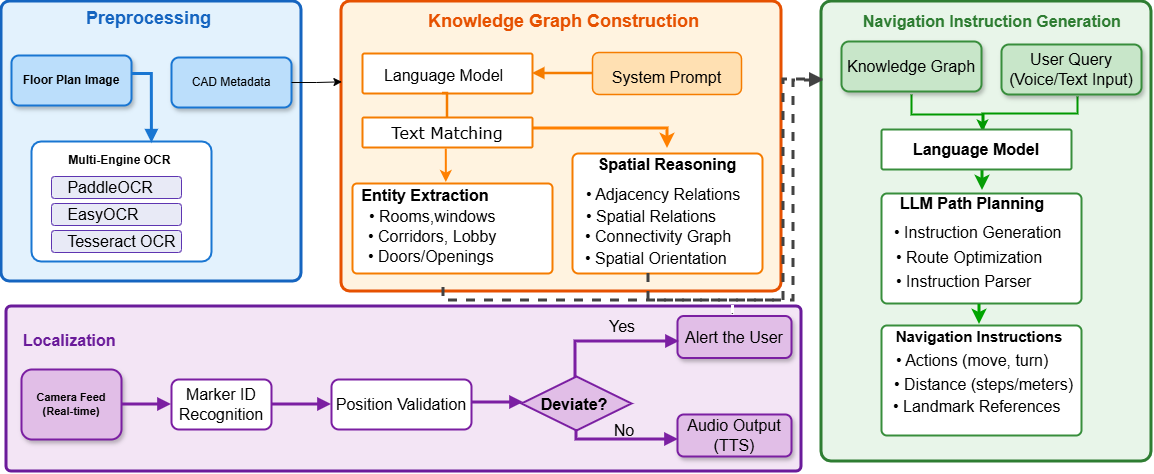
실내 내비게이션은 시각장애인에게 여전히 큰 과제이다. 기존 솔루션은 주로 인프라 기반 시스템에 의존해 동적 환경에서 안전한 이동을 보장하기 어렵다. 본 연구는 건축 평면도를 지식그래프로 변환하고 인간이 이해할 수 있는 안내문을 생성하는 새로운 내비게이션 방식을 제안한다. Floorplan2Guide는 대형 언어 모델(LLM)을 활용해 평면도에서 공간 정보를 자동 추출함으로써 기존 방법이 요구하던 수작업 전처리를 크게 감소시킨다. 실험 결과, 5‑shot 프롬프트를 적용한 경우 Claude 3.7 Sonnet이 짧은 경로(92.31 %), 중간 경로(76.92 %), 긴 경로(61.54 %)에서 가장 높은 정확도를 보였다. 그래프 기반 공간 구조를 이용한 성공률은 모든 모델에서 직접 시각 추론보다 15.4 % 높아, 그래프 표현과 인‑컨텍스트 학습이 내비게이션 성능을 향상시킴을 확인했다.💡 논문 핵심 해설 (Deep Analysis)
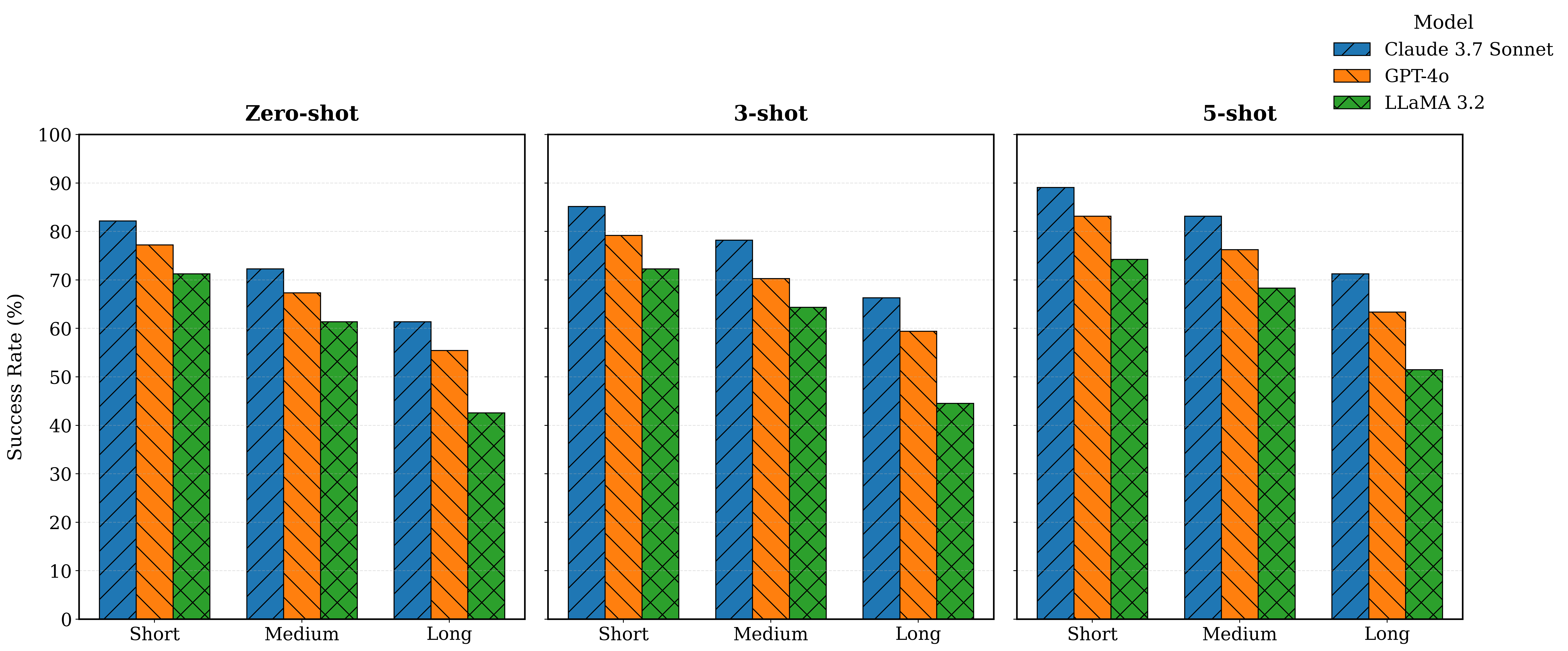
LLM을 활용한 ‘few‑shot’ 학습이 핵심 성능 향상을 이끌었다는 점도 주목할 만하다. 논문에서는 zero‑shot 대비 5‑shot 프롬프트를 적용했을 때 정확도가 현저히 상승했으며, 특히 Claude 3.7 Sonnet 모델이 모든 경로 길이에서 최고 성능을 기록했다. 이는 LLM이 제한된 예시만으로도 도메인 특화된 공간 논리를 빠르게 학습할 수 있음을 시사한다. 또한, 그래프 기반 접근법이 직접 시각 추론보다 15.4 % 높은 성공률을 보인 것은, 구조화된 표현이 복합적인 경로 계획에 더 적합하다는 강력한 증거다.
실험은 시뮬레이션 환경과 실제 MP‑1 건물 평면도를 사용해 진행됐으며, ‘짧은’, ‘중간’, ‘긴’ 세 가지 경로 길이로 나누어 평가했다. 결과는 모델별 성능 차이를 명확히 보여주며, 특히 장거리 경로에서는 정확도가 다소 떨어지는 점이 관찰되었다. 이는 LLM이 장거리 논리 연결을 유지하는 데 아직 한계가 있음을 의미한다. 또한, 현재 시스템은 평면도에 대한 사전 지식(스케일, 레이블 정확도 등)이 충분히 확보돼야 한다는 전제 조건이 있다.
한계점으로는 (1) 평면도 품질에 민감하다는 점, (2) 실시간 장애물(가구 이동, 사람 흐름) 반영이 어려워 동적 상황에 대한 보완이 필요하다는 점, (3) LLM의 ‘hallucination’ 현상이 발생할 경우 잘못된 안내문이 생성될 위험이 있다는 점을 들 수 있다. 향후 연구에서는 실시간 센서 데이터와 그래프를 융합해 동적 환경 적응성을 높이고, 프롬프트 엔지니어링을 자동화해 사용자 맞춤형 안내문을 생성하는 방안을 모색할 필요가 있다. 또한, 다중 LLM 앙상블이나 라지‑스케일 파인튜닝을 통해 장거리 경로에서의 논리 일관성을 강화하는 것이 기대된다.
전반적으로 본 연구는 ‘대형 언어 모델 + 지식 그래프’라는 새로운 패러다임을 제시함으로써, 비용 효율적이면서도 확장 가능한 실내 내비게이션 솔루션의 가능성을 열었다. 시각장애인에게 실질적인 이동 자유를 제공하기 위한 중요한 발걸음이라 할 수 있다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리