- 저자: Xavier Bou, Elliot Vincent, Gabriele Facciolo, Rafael Grompone von Gioi, Jean-Michel Morel, Thibaud Ehret
이 논문에서는 원격 감지 이미지 쌍에서 지표면 변화를 감지하는 문제에 대해 다룹니다. 이 작업은 심미적 변화 감지(Semantic Change Detection, SCD)라고 합니다. 최근 몇 년 동안 SCD는 큰 관심을 받았으며 많은 연구와 여러 분야의 조사가 이루어졌습니다. 기존 방법들은 주로 딥 러닝에 의존하여 3개의 신경망을 학습합니다: 두 개의 심미적 맵과 이진 변화 맵을 출력하는 네트워크입니다. 그러나 이러한 모델을 훈련시키기 위해서는 픽셀 수준의 주석이 필요한데, 이를 얻는 것은 비용이 많이 들고 시간도 오래 걸립니다. 따라서 우리는 단일 시점 주석만 사용하여 이진 시점 쌍에 대한 변화 감지 네트워크를 훈련시키는 약한 지정 학습 프레임워크를 제안합니다.
1. **주요 기여 1: 데이터 확장**
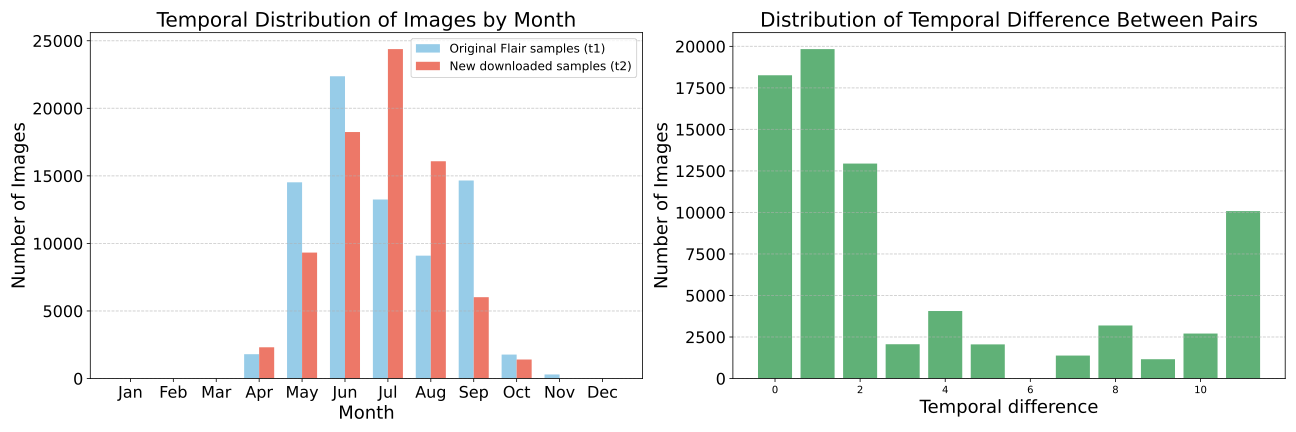
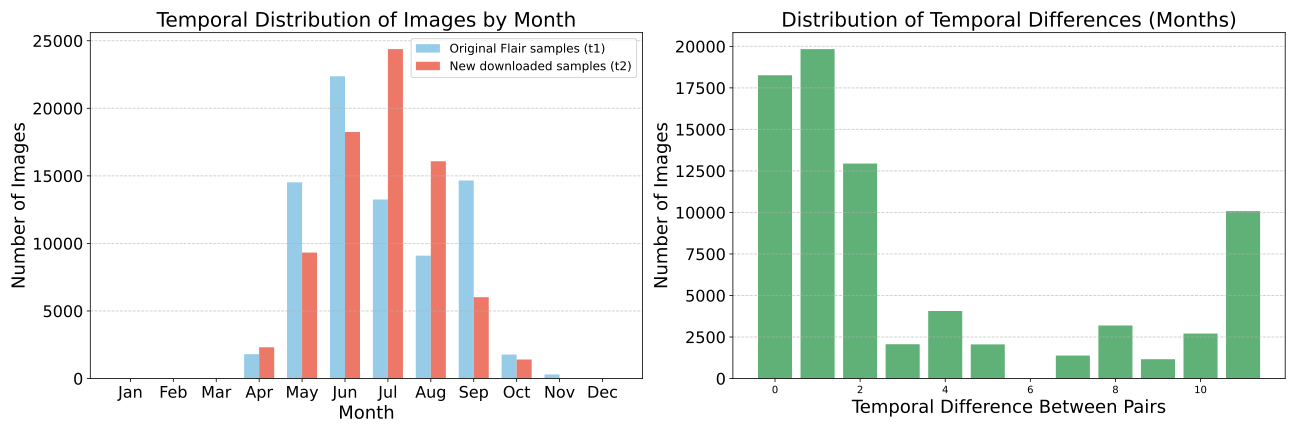
이 논문은 FLAIR와 IAILD라는 단일 시점 주석 데이터셋을 시간적 쌍으로 확장하는 방법을 소개합니다. 이를 통해 새로운 이미지를 추가함으로써 변화 감지 모델의 훈련 비용을 크게 줄입니다.
소개
원격 감지 데이터에서 변화를 검출하고 모니터링하는 것은 최근 몇 년 동안 지구 관측 커뮤니티의 핵심 주제였습니다. 원격 감지 변화 검출은 자연 재해 피해 평가, 도시 개발 모니터링, 또는 훼손된 숲 탐지를 포함한 다양한 응용 분야를 제공합니다. 특히 이진 시점 변화 검출 작업은 다른 날짜에 촬영된 등록된 위성 또는 항공 사진 쌍 사이의 의미적인 차이점을 찾는 것입니다.
이 작업을 수행하는 최신 방법론은 픽셀 수준 변경 맵이나 두 날짜 모두의 의미적 맵으로 주석 처리된 이미지 쌍 데이터셋에서 훈련된 딥 뉴럴 네트워크를 사용합니다. 그럼에도 불구하고 그러한 데이터를 수집하는 것은 비용이 많이 들고 시간이 오래 걸립니다. 결과적으로 변화 검출 데이터는 공간적이나 시점적으로 집중되어 있으며, 이러한 방법은 새로운 미보기 위치에 대해 잘 일반화하지 못합니다. 레이블링 데이터의 부족을 해결하기 위해 여러 연구에서는 비지도 학습 또는 약한 지정 방식으로 변경 감지 모델을 훈련시키려고 시도하였지만, 이러한 방법은 완전히 지정된 접근법에 비해 여전히 뒤처져 있습니다.
품질 있는 의미적 주석을 더 큰 규모로 활용하기 위해 여러 연구에서는 단일 시점 주석 데이터셋을 활용하여 변경 감지 모델을 훈련시키려고 합니다. 이는 기존 데이터로부터 생성된 인공 변화 데이터셋뿐만 아니라, 다른 위치의 이미지를 학습 쌍으로 결합하는 학습 프레임워크를 포함합니다. 그러나 이러한 시도들은 원격 센싱 데이터의 증가하는 가용성에 대한 활용을 놓치고 있습니다.
본 논문에서는 쉽게 접근 가능한 영상 자료를 활용하여 단일 날짜 의미 분할 데이터셋을 이진 시점 컬렉션으로 확장합니다. 단일 시점 의미 맵만 사용해 이진 시점 쌍에 대한 변경 감지 네트워크를 훈련시키는 새로운 약한 지정 패러다임을 소개합니다. 이러한 시간적 다양성을 도입함으로써 모델은 의미적으로 중요한 변화가 아닌 자연스럽게 발생하는 변동에도 노출됩니다.
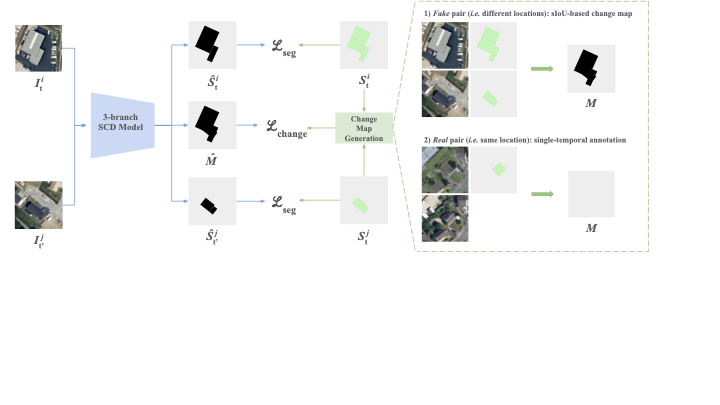
이 약한 시간적 지정은 본질적으로 잡음을 포함하므로, 우리는 세 가지 핵심 훈련 아이디어를 제안합니다. 첫째로, 실제 이진 시점 쌍과 가짜 비중첩 쌍을 훈련 중에 균형 있게 사용합니다. 둘째로, sIoU 기반 변경 맵으로 가짜 쌍을 지정하는 방법에서 영감을 받습니다. 셋째로, 확장된 데이터셋을 반복적으로 정제하여 실제 변화가 있는 쌍을 필터링하여 훈련 중에 이러한 쌍이 변하지 않은 것으로 간주할 수 있도록 합니다.
우리의 방법론은 기존의 두 데이터셋인 FLAIR와 IAILD를 확장하고 이를 검증합니다. 여러 실험을 통해 추가적인 시간적 획득과 의미 분할 데이터셋을 사용하여 레이블링 비용 없이 변화 감지를 개선할 수 있다는 것을 보여줍니다.
-
우리는 FLAIR 및 IAILD 데이터셋을 단일 날짜에서 이진 시점으로 확장하고 이를 공개합니다. 또한 FLAIR 확장을 기반으로 건물 변경 감지 방법의 내부 평가를 위한 테스트 세트를 정리하고 공개합니다.
-
우리는 추가적인 주석이 없는 이미지를 활용하여 변화 감지 네트워크를 훈련시키는 접근 방식을 개발했습니다.
-
여러 데이터셋에서 광범위한 실험을 통해 우리의 방법이 변화 감지 모델의 성능을 향상시킨다는 것을 보여줍니다. 이를 통해 우리는 강력한 제로샷 수행, 인상적인 저데이터 환경 결과 및 매혹적인 대규모 양적 결과를 보여줍니다.
관련 연구
본 논문에서는 이진 시점 원격 감지 이미지 쌍에서 지표면 변화를 검출하는 문제에 대해 다룹니다. 이 작업을 심미적 변화 검출(Semantic Change Detection, SCD)이라고 합니다.
최근 몇 년 동안 SCD는 큰 관심을 받았으며 많은 연구와 여러 분야의 조사가 이루어졌습니다. 대부분의 최신 방법은 3개의 브랜치 신경망을 훈련시키기 위해 딥 러닝에 의존합니다. Daudt 등이 처음 도입한 이러한 아키텍처는 주어진 이진 시점 이미지 쌍에 대해 두 개의 의미적 맵과 이진 변화 맵으로 구성된 트리플렛을 출력합니다.
단일 시점 주석만 사용하여 이진 시점 쌍에 대한 변경 감지 네트워크를 훈련시키는 약한 지정 학습 프레임워크를 제안합니다. 단일 시점 분할 모델의 출력을 비교하는 후분류 변화 검출 방법은 이미지를 추가적으로 활용하여 데이터 증강에 사용될 수 있습니다.
방법론
우리는 심미적 세그멘테이션 작업을 위해 주석 처리된 단일 시점 위성 또는 항공 이미지 데이터셋에서 변경을 감지하는 학습에 집중합니다. 새로운 획득을 얻는 비용보다 주석을 얻는 것이 더 비싸다는 관찰에 기반하여, 우리의 파이프라인은 이러한 데이터셋을 시간적으로 확장시키고(섹션 3.1), 새롭게 생성된 이진 시점 쌍과 단일 시점 주석을 활용해 의미적 변경 감지 모델을 훈련시킵니다(섹션 3.2). 구현 세부 사항은 섹션 3.3에서 제공됩니다.
D는 N개의 위성 또는 항공 이미지 I_ti^i와 해당 시간 ti에 주석 처리된 단일 시점 데이터셋입니다. 각 이미지는 의미적 마스크 S_ti^i로 주석 처리되어 있습니다. 우리의 목표는 이러한 데이터셋을 새로운, 쉽게 얻을 수 있는 주석이 없는 시간적 획득 I_t'i와 확장하여 학습 가능한 모델 fθ를 훈련시키는 것입니다.
데이터
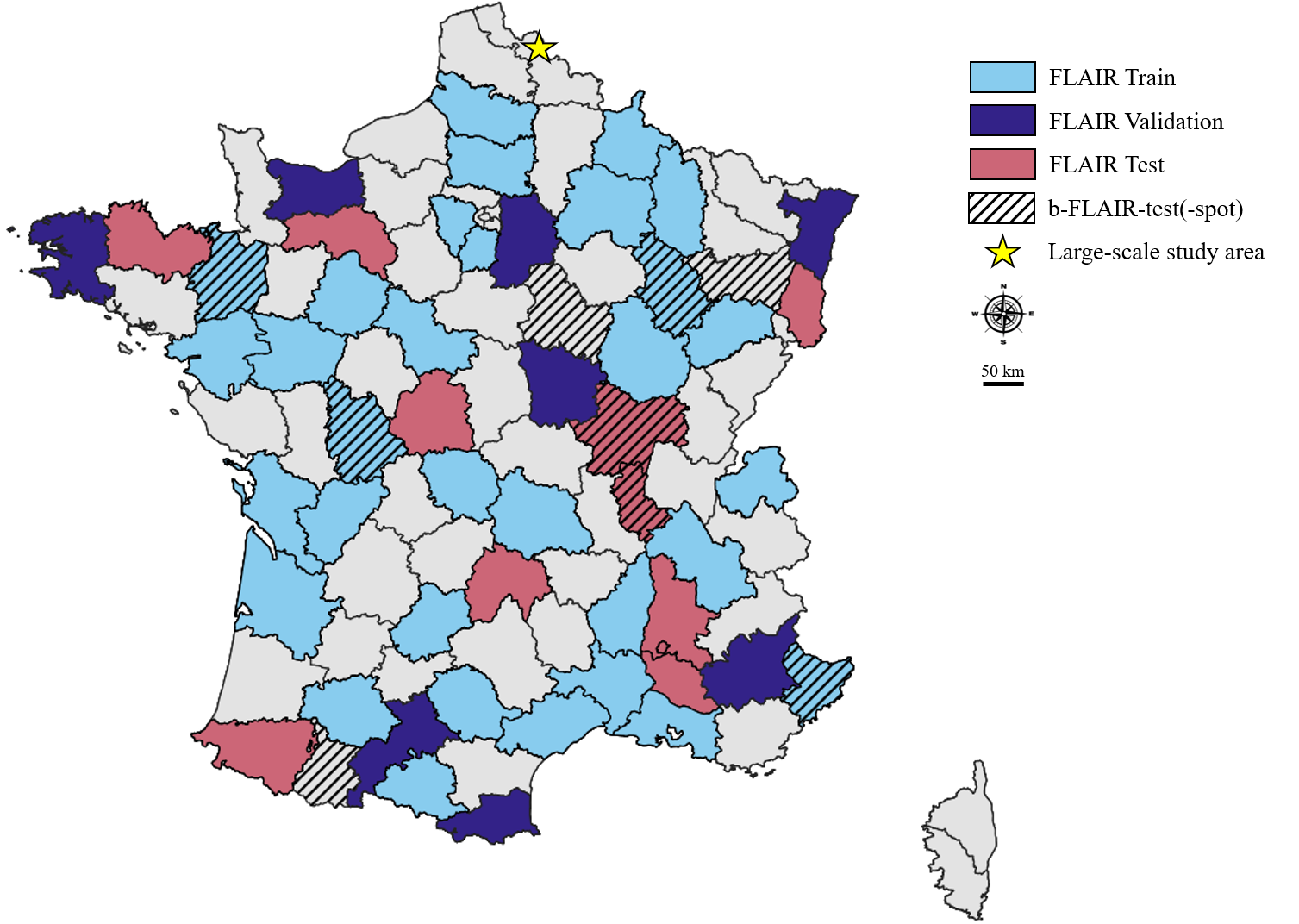
우리의 방법론을 검증하기 위해 기존 항공 이미지 데이터셋인 FLAIR 및 Inria 항공 이미지 라벨링 데이터셋(IAILD)에 적용합니다. 이 데이터셋은 3개 국가(France, USA, Austria)를 포함하고 있습니다.
FLAIR는 프랑스 국가 지리 및 삼림 정보원(ING)‘의 BD ORTHO에서 기반한 항공 정사영 사진 데이터베이스입니다. 모든 FLAIR 이미지 패치는 19개의 지표면 클래스 중 하나로 픽셀을 할당하는 의미적 맵으로 주석 처리되어 있습니다. BD ORTHO는 평균적으로 3년마다 갱신되므로, 동일한 위치에서 다른 날짜에 항공 이미지를 수집할 수 있습니다.
IAILD는 미국과 오스트리아의 도시 지역을 다룹니다. IAILD의 훈련 세트만 확장되었으며, 테스트 세트는 공개되지 않았습니다. 각 위치에서는 해당 기관(미국은 USGS, 오스트리아는 각 GIS 기관)이 제공하는 최신 정사영 이미지 획득 캠페인에서 패치를 수집합니다.
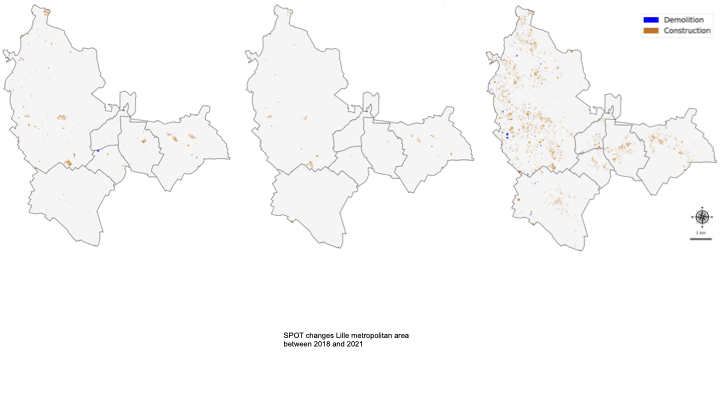
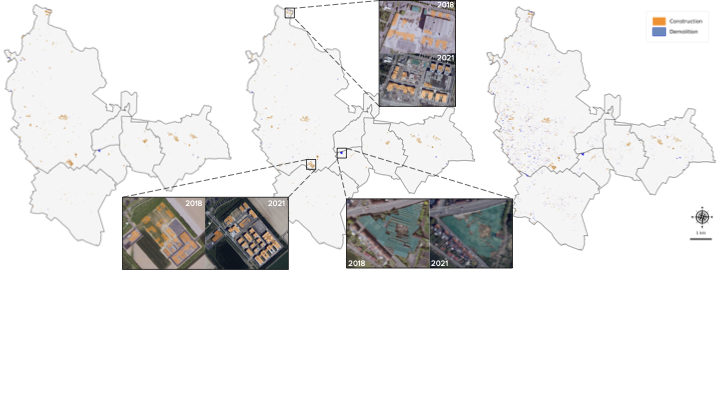
우리는 또한 매우 높은 해상도 항공 이미지를 넘어서 위성 변형 b-FLAIR을 만들었습니다. 이진 시점 쌍에 대해 IGN의 ORTHO-SAT 데이터베이스에서 SPOT-6/7 이미지들을 다운로드합니다.
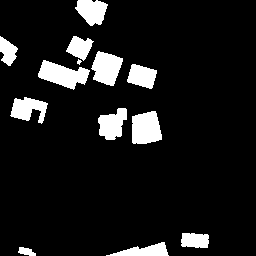
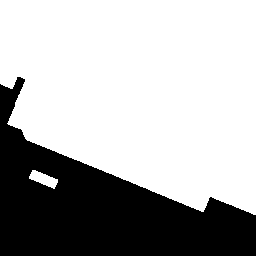
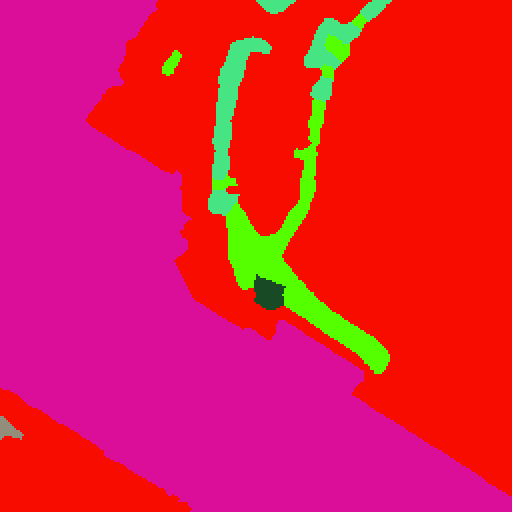
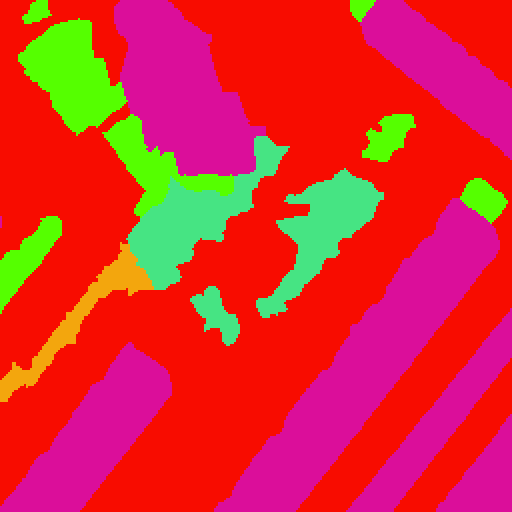
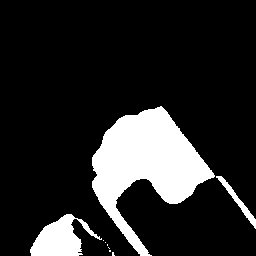
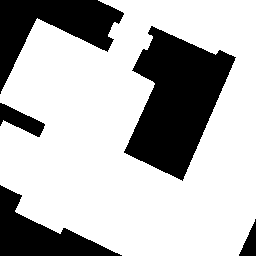
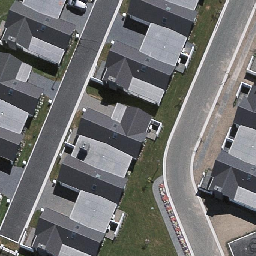
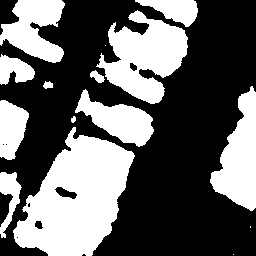
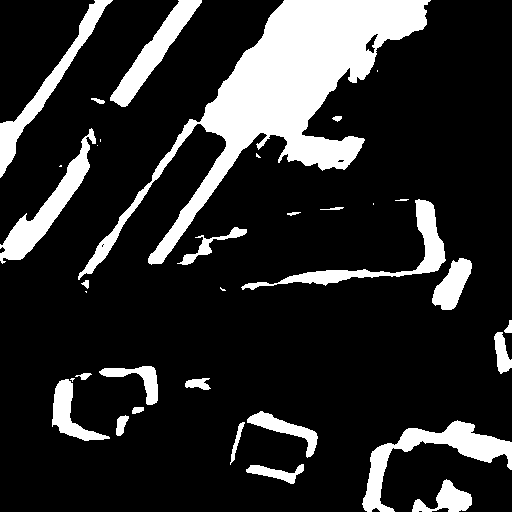
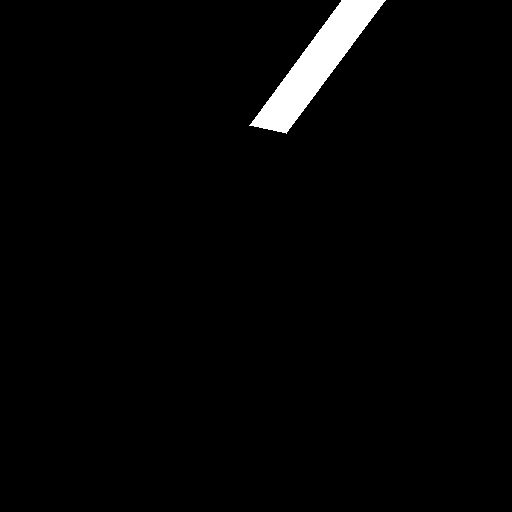
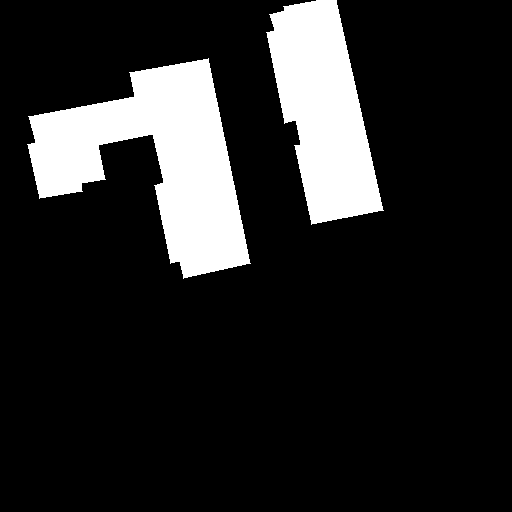
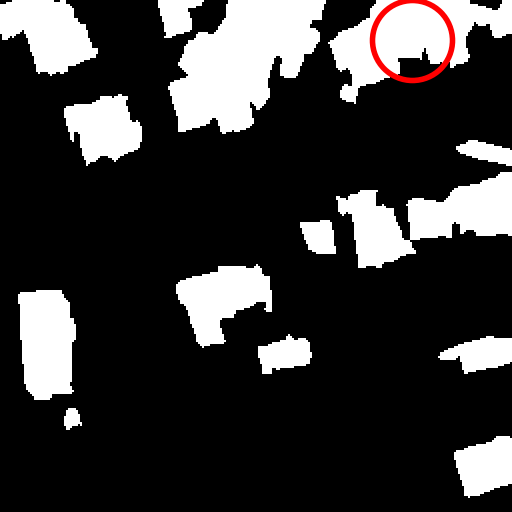
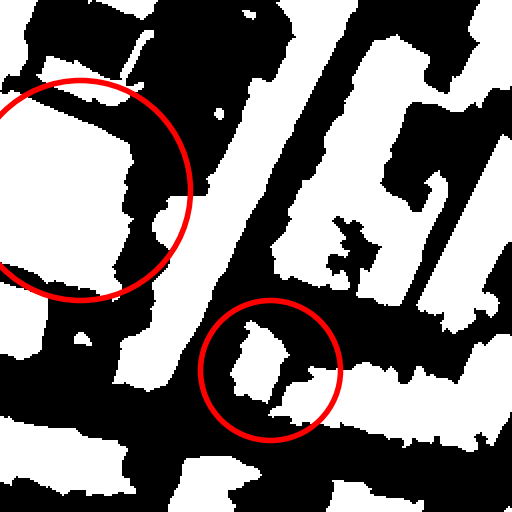
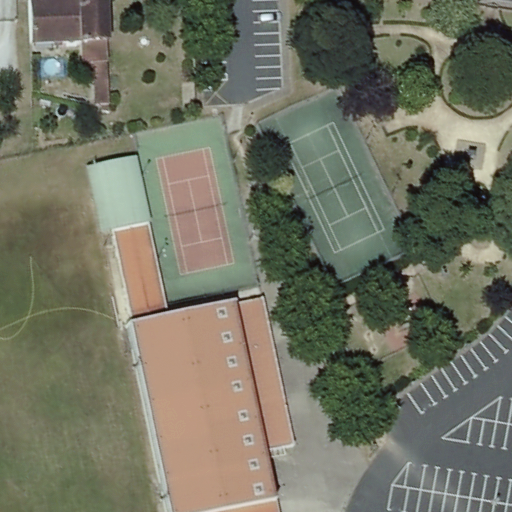
b-FLAIR, b-IAILD 및 b-FLAIR-spot은 트리플렛(S_t, I_t, I_t’)을 포함합니다. 이러한 트리플렛의 예는 그림 1에 표시되어 있습니다.
우리는 경쟁 모델을 5개 데이터셋에서 평가합니다. FLAIR와 b-FLAIR-spot로 훈련된 방법의 내부 평가를 위해 b-FLAIR-test 및 b-FLAIR-test-spot을 공개합니다. 모든 방법에 대한 외부 평가는 LEVIR-CD, WHU-CD 및 S2Looking이라는 세 개의 데이터셋에서 이루어집니다.
단일 날짜 라벨링으로 훈련
주어진 트리플렛(S_ti^i, I_ti^i, I_t’i^i)i=1,…N의 집합에 대해 우리의 목표는 이진 시점 변경 감지 신경망 fθ를 훈련시키는 것입니다. 우리의 방법론은 입력 이미지 쌍(I_t, I_t’)을 받아 트리플렛(Ŝ_t, Ŝ_t’