에셔버스 물리·동역학·의도 기반 텔레오스페이셜 인텔리전스 오픈월드 벤치마크
📝 원문 정보
- Title: EscherVerse: An Open World Benchmark and Dataset for Teleo-Spatial Intelligence with Physical-Dynamic and Intent-Driven Understanding
- ArXiv ID: 2601.01547
- 발행일: 2026-01-04
- 저자: Tianjun Gu, Chenghua Gong, Jingyu Gong, Zhizhong Zhang, Yuan Xie, Lizhuang Ma, Xin Tan
📝 초록 (Abstract)
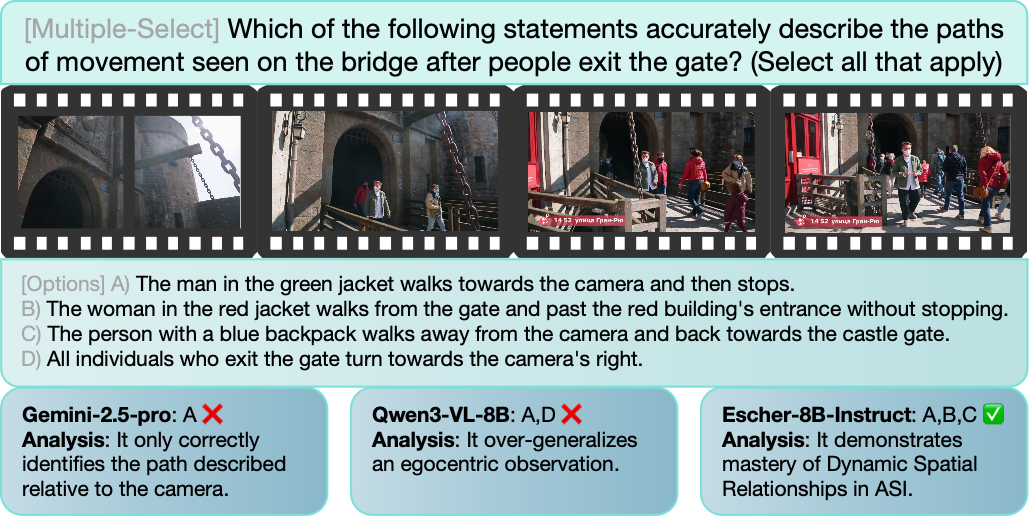
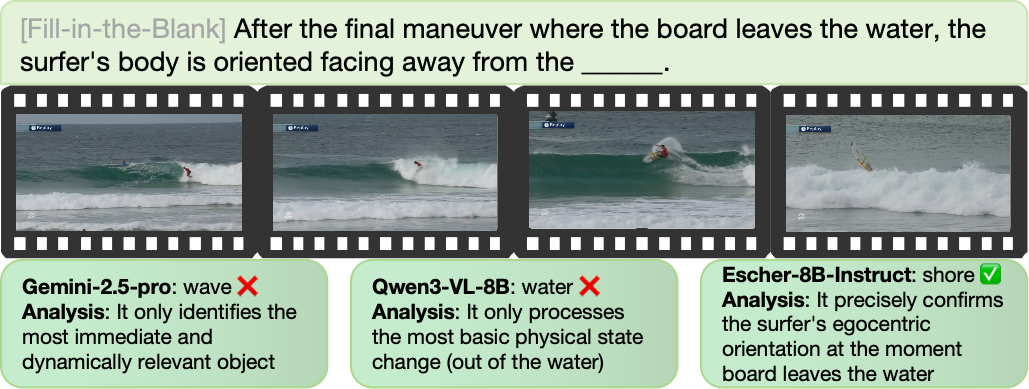
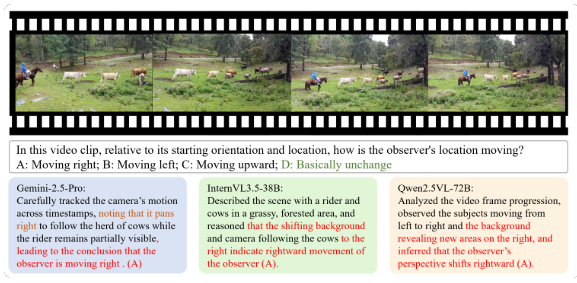
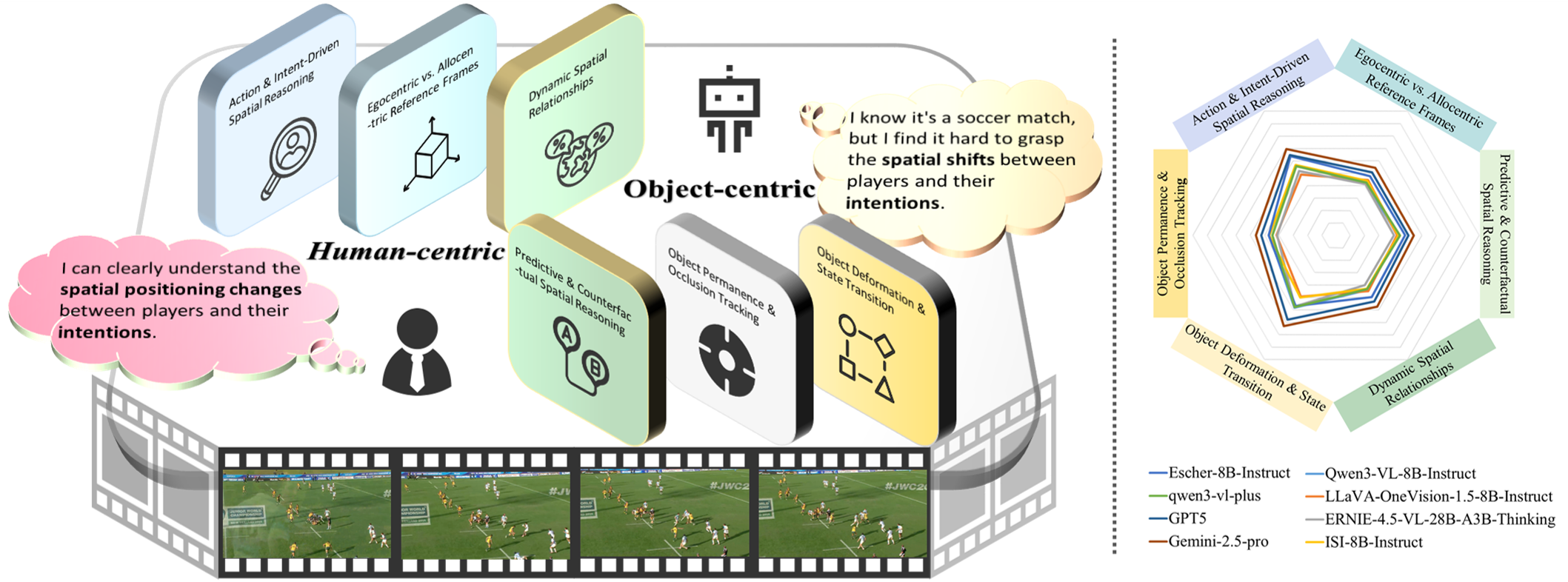
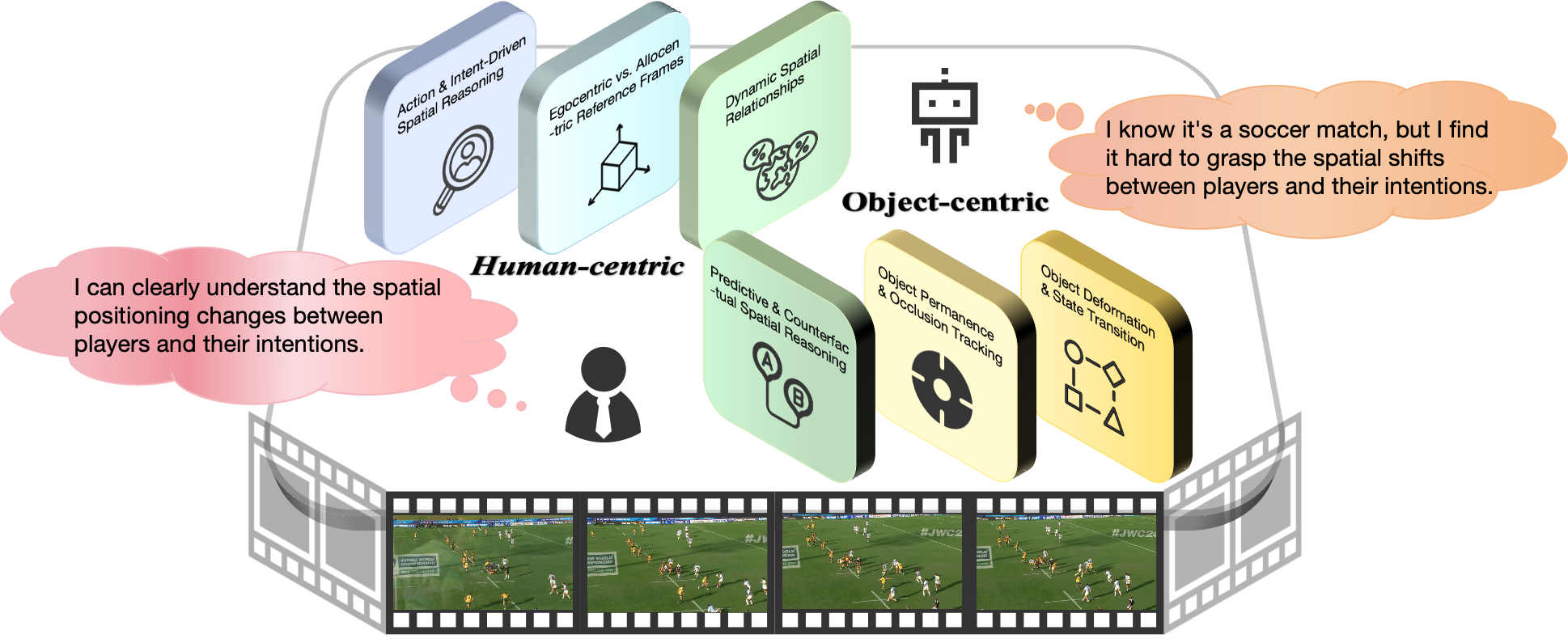
** 그림 1. 텔레오‑스페이셜 인텔리전스(TSI)의 개념을 현재 패러다임과 대비하여 보여준다. 기존 접근 방식은 근본적으로 객체 중심이며, 물체가 어떻게 움직이고 상호작용하는지를 이해하는 물리‑동역학 추론에만 초점을 맞춘다. 그러나 이러한 방법은 변화 뒤에 숨은 인간의 목적을 파악하지 못한다. 우리가 제안하는 TSI는 인간 중심 패러다임으로, 물리‑동역학과 의도‑구동 추론을 통합한다. 이 시너지 효과는 “어떻게”가 아니라 “왜” 공간적 변화가 발생하는지를 추론함으로써 전체적인 이해를 가능하게 한다.**
💡 논문 핵심 해설 (Deep Analysis)
본 논문은 인공지능·로보틱스 분야에서 최근 주목받고 있는 “텔레오‑스페이셜 인텔리전스(TSI)”라는 새로운 개념을 제시한다. 기존의 대부분 연구는 물체‑중심(object‑centric) 접근을 취해, 물리‑동역학(Physical‑Dynamic) 모델링에 집중한다. 예컨대, 물체의 질량·마찰·충돌 법칙을 이용해 시뮬레이션하거나, 비전 기반 트래킹을 통해 움직임을 예측한다. 이러한 방법은 정량적 정확도에서는 뛰어나지만, 인간이 물체를 조작하거나 배치하는 근본적인 ‘의도’를 파악하지 못한다는 한계가 있다.
TSI는 이러한 한계를 극복하기 위해 두 축을 결합한다. 첫 번째 축은 기존의 물리‑동역학 추론으로, 물체의 위치·속도·가속도 등 물리적 상태 변화를 정밀하게 모델링한다. 두 번째 축은 ‘Intent‑Driven Reasoning’, 즉 행위자의 목표·계획·맥락을 추론하는 인간‑중심적 추론이다. 이 두 축을 통합함으로써 시스템은 “어떤 물체가 어떻게 움직였는가”를 넘어 “왜 그런 움직임이 발생했는가”를 묻고 답할 수 있다.
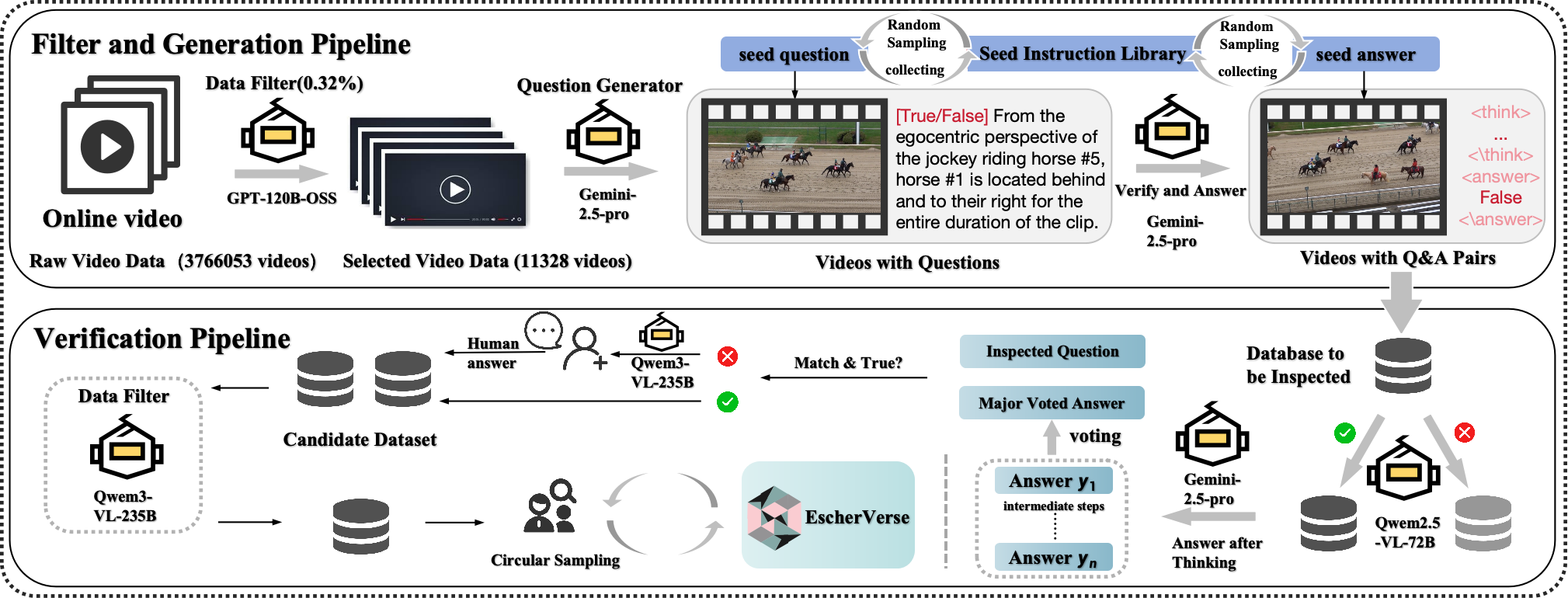
논문에서 제시한 ‘EscherVerse’ 벤치마크는 이러한 TSI를 평가하기 위한 오픈 월드 환경을 제공한다. 특징은 다음과 같다.
- 다양한 물리‑동역학 시나리오: 중력, 마찰, 유체 흐름 등 복합적인 물리 법칙이 동시에 적용되는 장면을 포함한다.
- 의도 라벨링: 각 시나리오마다 인간 행위자가 가지고 있는 목표(예: 물건을 특정 위치에 놓아 문을 열기, 무게 중심을 이동시켜 구조물 균형 맞추기 등)가 메타데이터로 제공된다.
- 멀티모달 센서 데이터: RGB‑D 영상, 포스/토크 센서, 음성 명령 등 다양한 입력을 동시에 제공해, 모델이 물리와 의도를 동시에 학습하도록 설계되었다.
- 오픈소스 및 확장성: Unity 3D 기반으로 구현돼 연구자들이 새로운 물리 규칙이나 의도 시나리오를 손쉽게 추가할 수 있다.
이러한 설계는 현재의 ‘시뮬레이션‑투‑리얼’ 격차를 메우는 데 기여한다. 로봇이 실제 작업 현장에서 “이 물체를 들어 올려야 하는 이유”를 이해한다면, 단순히 사전 정의된 경로를 따르는 것이 아니라 상황에 맞는 대안을 스스로 생성할 수 있다. 또한, 인간‑로봇 협업(HRI)에서도 로봇이 인간의 의도를 실시간으로 추론함으로써 보다 자연스러운 상호작용이 가능해진다.
하지만 몇 가지 도전 과제도 남아 있다. 첫째, 의도 라벨링은 주관적이며 문화·개인 차이에 따라 달라질 수 있다. 따라서 라벨링 프로세스의 표준화와 다중 라벨링 기법이 필요하다. 둘째, 물리‑동역학과 의도 추론을 동시에 학습하는 모델은 계산 비용이 크게 증가한다. 효율적인 멀티태스크 학습 구조와 경량화된 아키텍처가 요구된다. 셋째, 현재 벤치마크는 주로 실내·가상 환경에 국한돼 있어, 야외·복합 환경으로의 확장이 필요하다.
종합하면, EscherVerse는 물리‑동역학과 인간 의도라는 두 축을 결합한 최초의 대규모 오픈 월드 벤치마크이며, 향후 TSI 연구의 기준점이 될 잠재력을 지닌다. 향후 연구는 라벨링 다양성 확보, 효율적 멀티모달 학습, 그리고 실제 로봇 시스템에의 전이(transfer) 연구에 초점을 맞춰야 할 것이다.
**
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리