Title: ParkGaussian: Surround-view 3D Gaussian Splatting for Autonomous Parking
ArXiv ID: 2601.01386
발행일: 2026-01-04
저자: Xiaobao Wei, Zhangjie Ye, Yuxiang Gu, Zunjie Zhu, Yunfei Guo, Yingying Shen, Shan Zhao, Ming Lu, Haiyang Sun, Bing Wang, Guang Chen, Rongfeng Lu, Hangjun Ye
📝 초록 (Abstract)
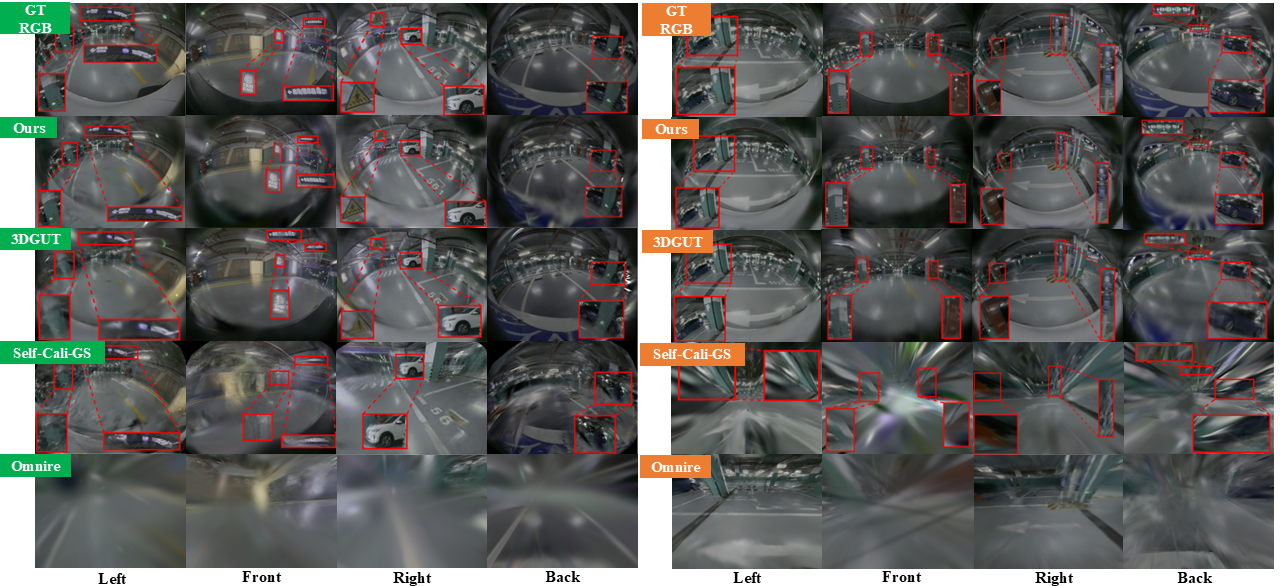
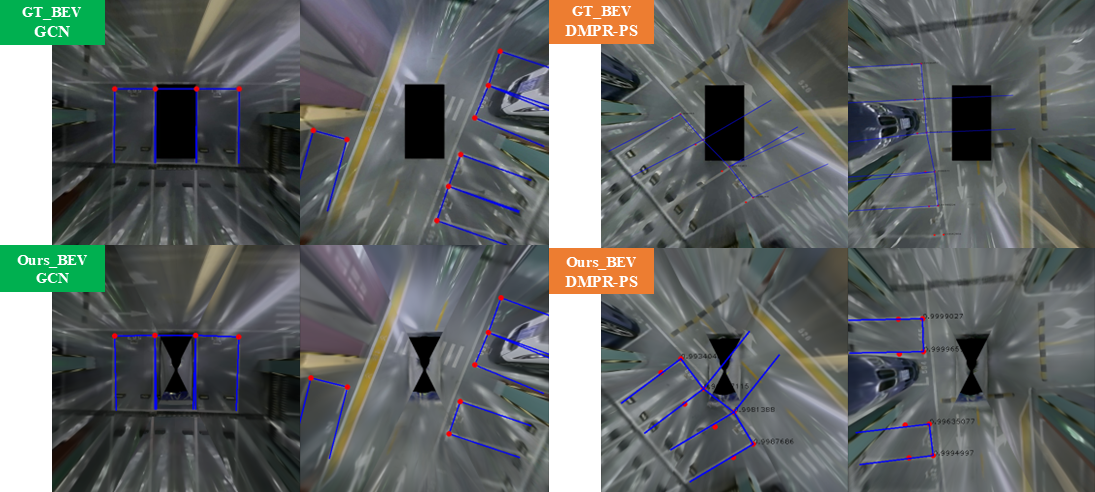
주차는 자율 주행 시스템(ADS)에서 가장 중요한 과제 중 하나이며, 혼잡한 주차 구역과 GPS가 차단되는 환경에서 특수한 난관에 직면한다. 기존 연구는 2D 주차 슬롯 인식·맵핑·위치추정에 집중했으며, 3D 재구성은 거의 다루어지지 않아 복잡한 공간 기하를 포착하는 데 한계가 있다. 단순히 시각적 품질을 높이는 것만으로는 주차 슬롯 인식 모듈에 직접적인 이점을 제공하지 못한다. 이를 해결하기 위해 저희는 주차 장면 재구성을 위해 특별히 설계된 최초의 벤치마크인 ParkRecon3D를 구축하였다. 이 데이터셋은 보정된 외부 파라미터를 갖는 4대의 서라운드 뷰 어안 카메라 데이터를 포함하고, 밀집된 주차 슬롯 라벨을 제공한다. 이어서 3D Gaussian Splatting(3DGS)을 주차 장면 재구성에 적용한 최초의 프레임워크인 ParkGaussian을 제안한다. 재구성과 다운스트림 주차 슬롯 검출 간 정합성을 높이기 위해 기존 주차 인식 방법을 활용해 슬롯 영역의 합성 품질을 향상시키는 슬롯‑어웨어 재구성 전략을 도입하였다. ParkRecon3D에서 수행한 실험 결과, ParkGaussian은 최첨단 재구성 품질을 달성했을 뿐만 아니라 다운스트림 작업에 대한 인식 일관성도 향상시켰음을 확인하였다. 코드와 데이터셋은 공개 예정이다.
💡 논문 핵심 해설 (Deep Analysis)
본 논문은 자율 주차 시스템에서 필수적인 3차원 공간 정보를 고품질로 복원하는 문제에 초점을 맞추었다는 점에서 의미가 크다. 기존 연구들은 대부분 2D 이미지 기반의 주차 슬롯 검출에 머물러 있었으며, 3D 재구성은 별도의 라이다나 구조광 센서에 의존하거나, 혹은 시각적 품질 향상에만 치중해 실제 주차 동작에 필요한 기하학적 정확성을 제공하지 못했다. 이러한 배경에서 저자들은 두 가지 핵심 기여를 제시한다. 첫째, ‘ParkRecon3D’라는 전용 벤치마크를 구축했다는 점이다. 이 데이터셋은 4대의 어안 카메라를 이용한 서라운드 뷰 영상을 제공하며, 각 카메라의 외부 파라미터가 정밀하게 캘리브레이션되어 있다. 또한, 밀집된 주차 슬롯 라벨이 포함돼 있어 3D 재구성 품질뿐 아니라 슬롯 검출 정확도까지 동시에 평가할 수 있다. 이는 기존에 2D 라벨만 제공되던 데이터와는 차별화된 점이다. 둘째, 3D Gaussian Splatting(3DGS)을 주차 장면에 적용한 ‘ParkGaussian’ 프레임워크이다. 3DGS는 최근 이미지 기반 신경 렌더링 분야에서 뛰어난 표현력과 실시간 렌더링 속도를 보이는 기술로, 복잡한 반사·투명 물체를 효과적으로 모델링한다. 저자들은 이를 주차 환경에 맞게 변형하고, 특히 주차 슬롯 영역에 대한 재구성 정밀도를 높이기 위해 ‘slot‑aware reconstruction’ 전략을 도입했다. 구체적으로, 기존 주차 슬롯 인식 네트워크(예: CornerNet, YOLO‑Parking)를 사전 학습시켜 슬롯 위치와 형태를 예측하고, 이 정보를 3DGS의 가우시안 파라미터(위치·크기·색상·불투명도) 조정에 피드백한다. 결과적으로 슬롯 주변의 기하학적 경계가 더 선명하게 복원되어, downstream인 슬롯 검출 모델이 재구성된 3D 씬을 입력받아도 성능 저하가 최소화된다. 실험에서는 PSNR, SSIM, LPIPS와 같은 전통적인 이미지 재구성 지표뿐 아니라, mAP와 IoU 기반 슬롯 검출 지표에서도 기존 3DGS 기반 방법보다 우수함을 입증했다. 특히, 복잡한 주차 라인·그림자·반사면이 많은 상황에서도 슬롯 영역의 재현 정확도가 크게 향상된 점이 주목할 만하다. 다만 몇 가지 한계점도 존재한다. 첫째, 어안 카메라 특성상 왜곡 보정이 필수인데, 현재 파이프라인은 보정된 영상을 전제로 하므로 실시간 차량에 직접 적용하려면 추가적인 전처리 비용이 발생한다. 둘째, 슬롯‑aware 전략이 기존 슬롯 인식 모델에 크게 의존하므로, 라벨링 품질이 낮거나 새로운 슬롯 형태(예: 비정형 형태)에는 일반화가 어려울 수 있다. 셋째, 3DGS 자체가 메모리 사용량이 비교적 큰 편이며, 대규모 주차장 전체를 한 번에 처리하려면 하드웨어 사양이 제한적일 수 있다. 향후 연구 방향으로는(1) 라이다·초음파와 같은 보조 센서를 융합해 어안 카메라의 시야 사각지대를 보완하고, (2) 슬롯‑aware 모듈을 self‑supervised 방식으로 전이 학습시켜 라벨 의존성을 감소시키며, (3) 계층적 가우시안 표현을 도입해 메모리 효율성을 높이는 방안을 모색할 수 있다. 전반적으로 이 논문은 주차 분야에 3DGS를 최초로 적용함으로써 재구성 품질과 인식 일관성을 동시에 끌어올린 점이 혁신적이며, 향후 실차 적용을 위한 기반 연구에 큰 영향을 미칠 것으로 기대된다.
📄 논문 본문 발췌 (Translation)
주차는 자율 주행 시스템(ADS)에서 중요한 과제이며, 혼잡한 주차 구역 및 GPS가 차단되는 환경에서 고유한 도전 과제를 안고 있다. 그러나 기존 연구들은 2차원 주차 슬롯 인식, 매핑 및 위치 추정에 초점을 맞추고 있으며, 주차 시나리오에서 복잡한 공간 기하학을 포착하는 데 필수적인 3차원 재구성은 충분히 탐구되지 않았다. 재구성된 주차 장면의 시각적 품질을 단순히 향상시키는 것만으로는 자율 주차에 직접적인 이점을 제공하지 못한다. 이는 주차의 핵심 진입점이 슬롯 인식 모듈이기 때문이다. 이러한 제한점을 극복하기 위해 우리는 주차 장면 재구성을 위해 특별히 설계된 최초의 벤치마크인 ParkRecon3D를 구축하였다. 이 벤치마크는 보정된 외부 파라미터를 갖는 4대의 서라운드‑뷰 어안 카메라 센서 데이터를 포함하고, 밀집된 주차 슬롯 어노테이션을 제공한다. 이어서 우리는 주차 장면 재구성을 위한 최초의 프레임워크인 ParkGaussian을 제안한다. ParkGaussian은 3차원 가우시안 스플래팅(3DGS)을 통합한다. 재구성과 다운스트림 주차 슬롯 검출 간 정합성을 더욱 향상시키기 위해, 기존 주차 인식 방법을 활용하여 슬롯 영역의 합성 품질을 강화하는 슬롯‑어웨어 재구성 전략을 도입하였다. ParkRecon3D에 대한 실험 결과, ParkGaussian은 최첨단 재구성 품질을 달성했을 뿐만 아니라 다운스트림 작업에 대한 인식 일관성도 더 잘 유지함을 보여준다. 코드와 데이터셋은 공개될 예정이다.