우선순위 인식 다중 로봇 커버리지 경로 계획
📝 원문 정보
- Title: Priority-Aware Multi-Robot Coverage Path Planning
- ArXiv ID: 2601.00580
- 발행일: 2026-01-02
- 저자: Kanghoon Lee, Hyeonjun Kim, Jiachen Li, Jinkyoo Park
📝 초록 (Abstract)
다중 로봇 시스템은 넓은 환경에서 효율적인 협업이 요구되는 커버리지 작업에 널리 활용된다. 기존 다중 로봇 커버리지 경로 계획(MCPP) 연구는 전체 영역을 겹치지 않게 커버하면서 전체 작업 시간을 최소화하는 데 초점을 맞추었으며, 영역별 중요도가 동일하다고 가정한다. 본 논문은 일부 구역에 높은 우선순위와 가중치를 부여하는 Priority‑Aware MCPP(PA‑MCPP) 문제를 정의하고, 우선순위 가중 지연 시간의 총합을 먼저 최소화하고 그 다음 전체 makespan을 최소화하는 사전순 최적화를 목표로 한다. 이를 위해 (1) 그리디 기반 구역 할당과 로컬 서치를 결합한 스패닝 트리 경로 생성, (2) 스테인러 트리를 이용한 잔여 영역 커버리지를 순차적으로 수행하는 두 단계 프레임워크를 제안한다. 다양한 시나리오에서 실험한 결과, 제안 방법은 기존 MCPP 베이스라인 대비 우선순위 가중 지연 시간을 크게 감소시키면서도 makespan은 경쟁 수준을 유지한다. 또한 로봇 수와 우선순위 가중치 변화에 대한 민감도 분석을 통해 확장성과 제어 가능성을 확인하였다.💡 논문 핵심 해설 (Deep Analysis)
문제 정의는 두 단계의 사전순 최적화로 구성된다. 첫 번째 단계는 우선 구역을 가능한 한 빨리 커버하도록 로봇에게 할당하는 것이며, 이때 목표는 우선순위 가중 지연의 총합을 최소화하는 것이다. 두 번째 단계는 남은 비우선 구역을 효율적으로 커버하여 전체 makespan을 최소화한다. 이러한 구조는 “우선 구역을 먼저, 나머지는 뒤에”라는 직관적인 전략을 수학적으로 정형화한 것으로, 기존의 단일 목표(예: makespan 최소화)와는 차별화된다.
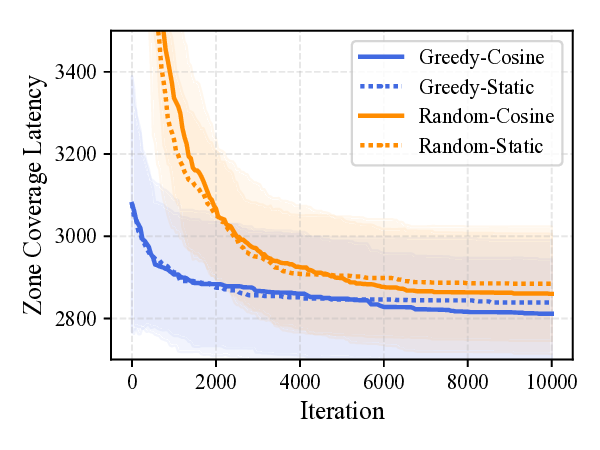
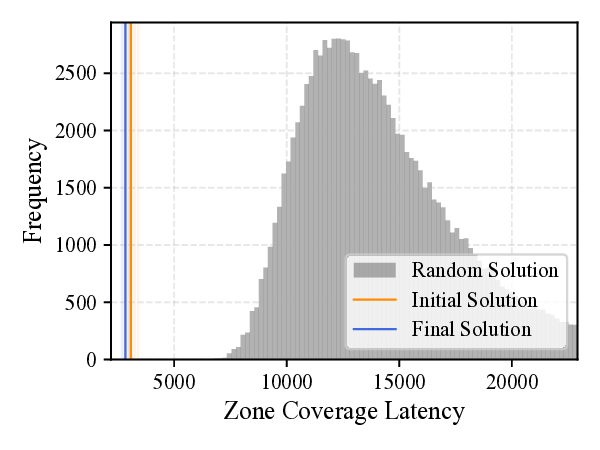
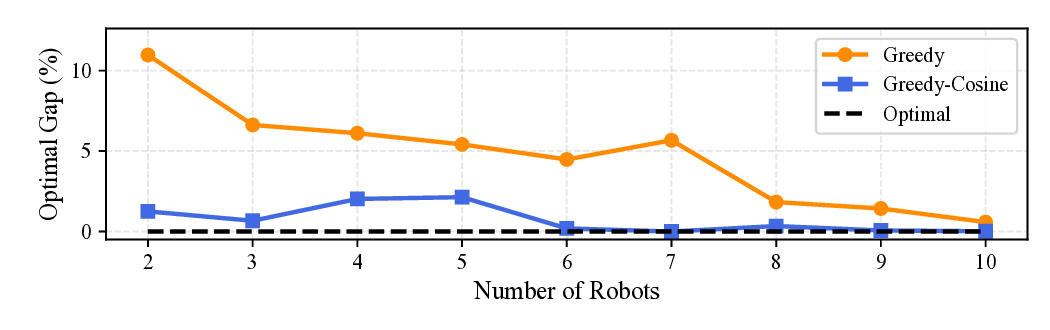
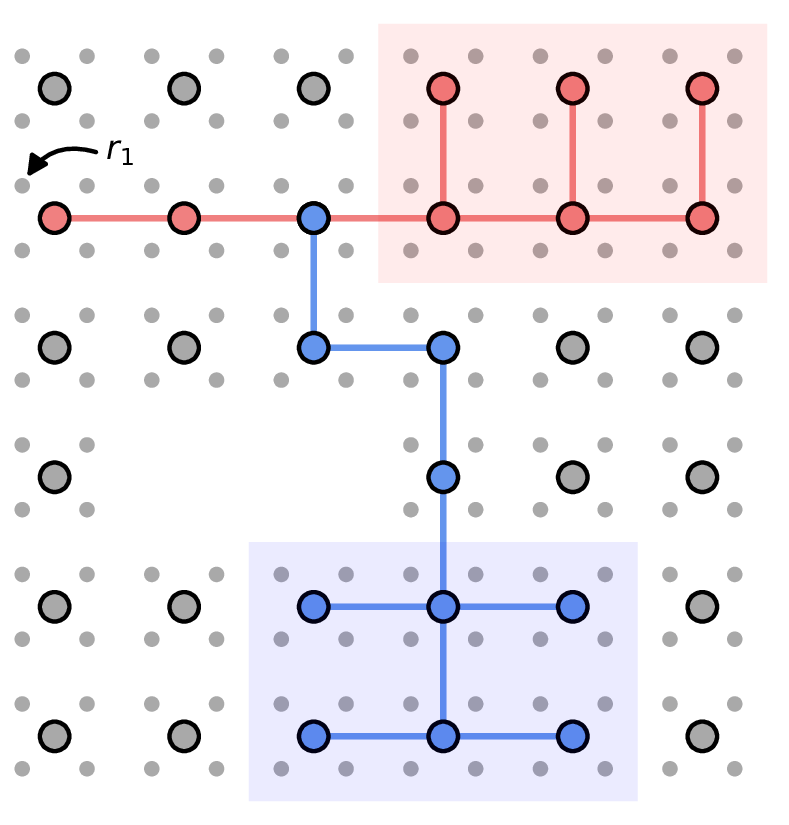
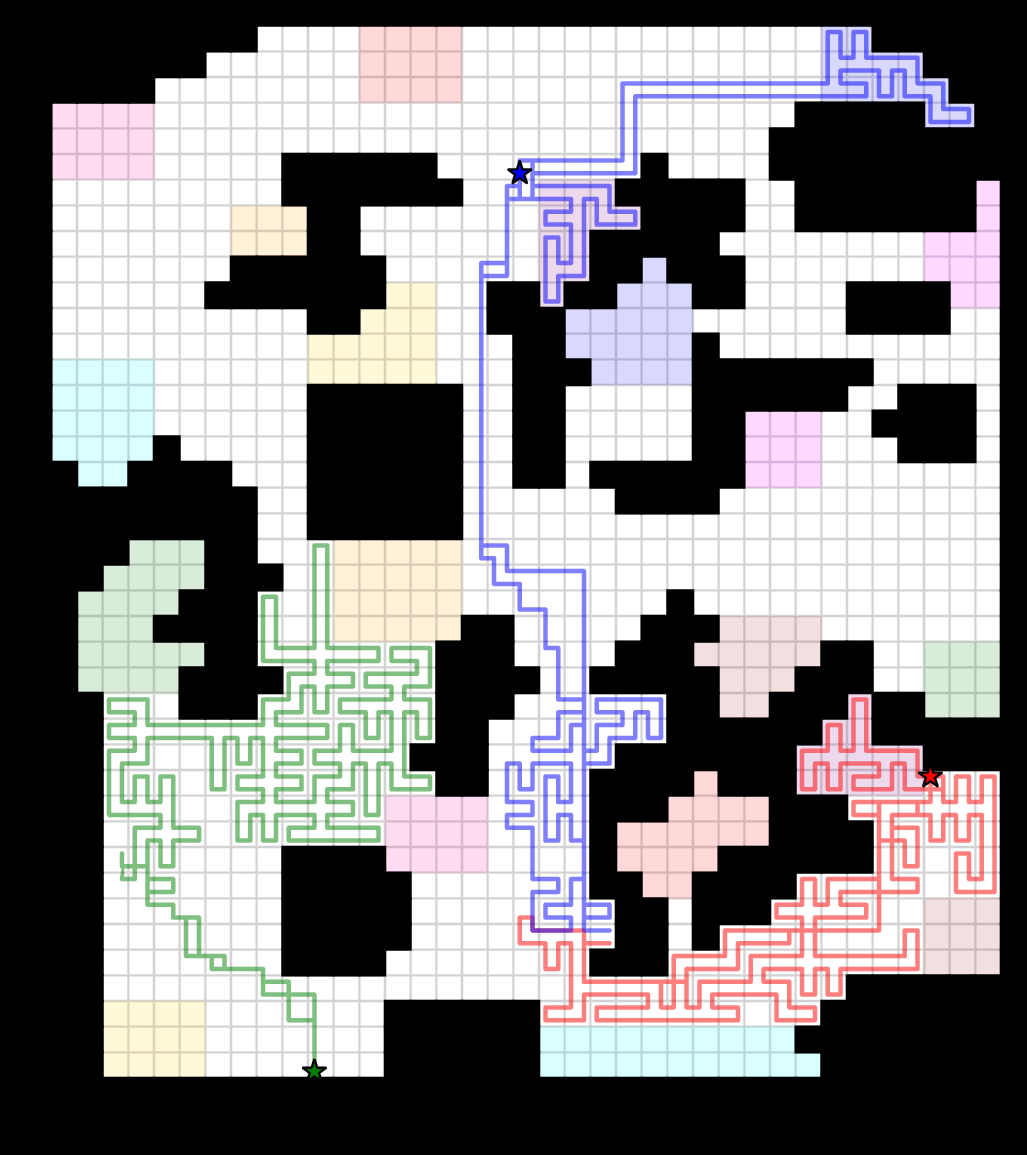
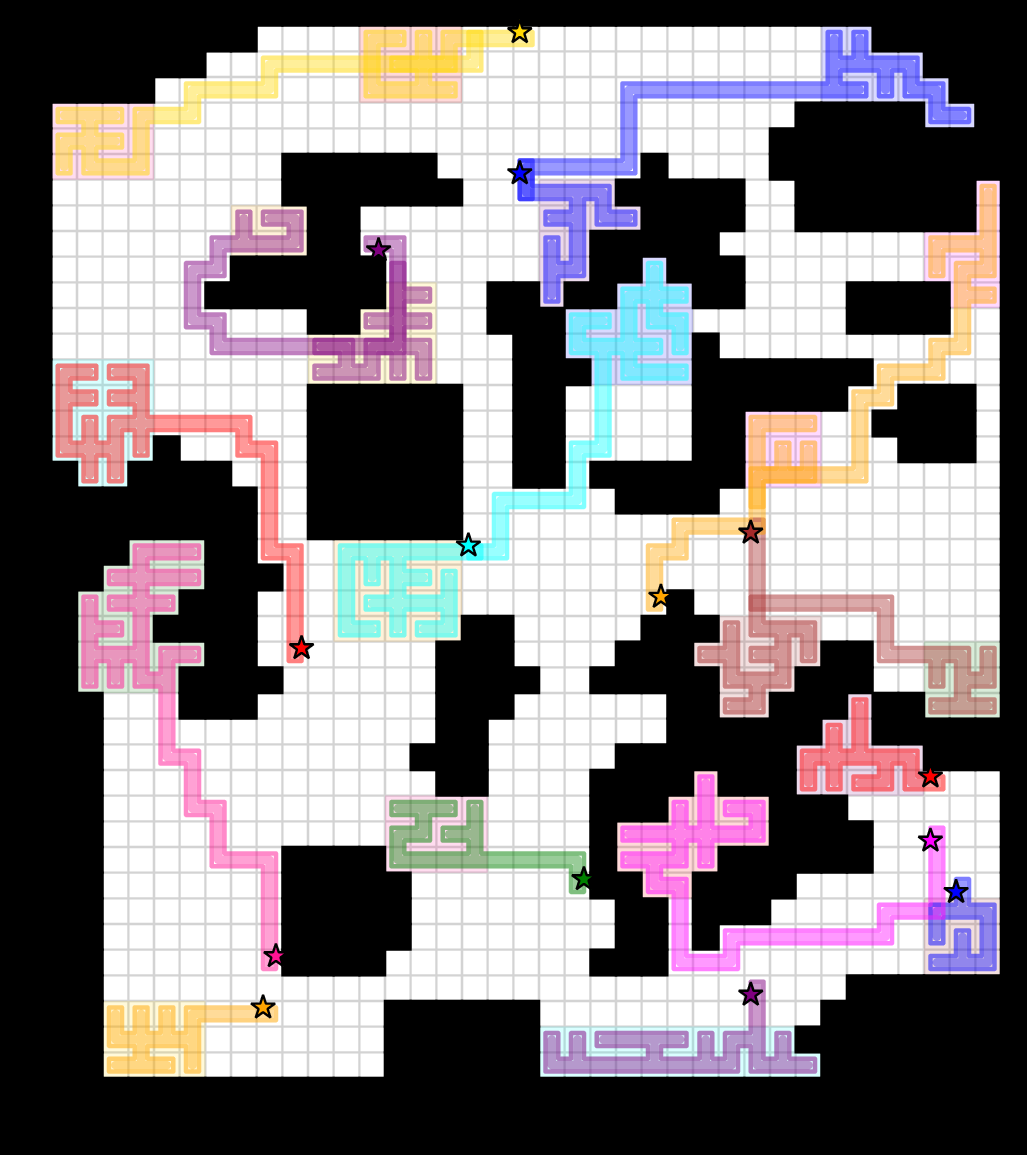
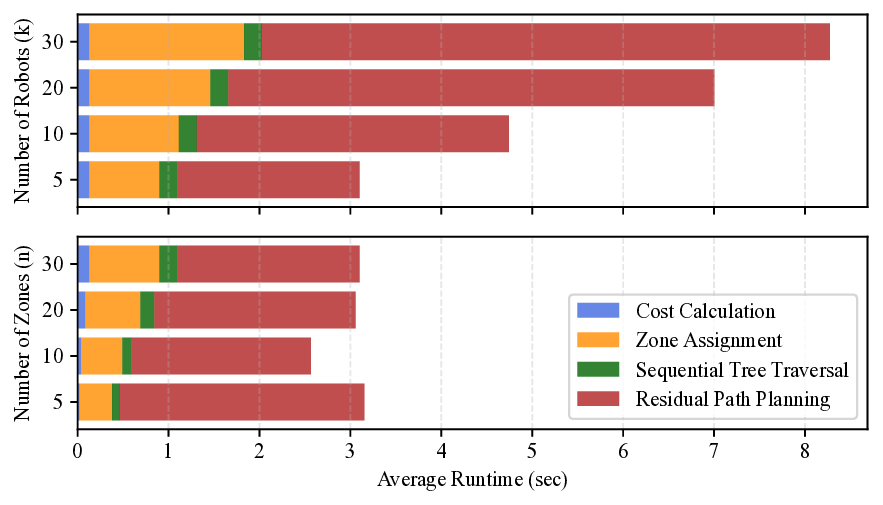
알고리즘적 접근은 크게 두 부분으로 나뉜다. 첫 번째 파트에서는 전체 환경을 그래프 형태로 모델링하고, 우선 구역을 포함한 서브그래프에 대해 그리디하게 로봇을 할당한다. 할당 후에는 로컬 서치를 통해 로봇 간 경로 교환이나 재배치를 수행해 가중 지연을 추가로 감소시킨다. 각 로봇이 담당하게 된 서브그래프에 대해서는 최소 스패닝 트리를 기반으로 깊이 우선 탐색(DFS) 순서의 커버리지 경로를 생성한다. 이 과정은 계산량이 O(|V| log |V|) 수준으로 확장성이 뛰어나며, 실제 로봇 수가 수십 대에 달해도 실시간 적용이 가능하도록 설계되었다.
두 번째 파트에서는 아직 커버되지 않은 비우선 구역을 대상으로 스테인러 트리를 구성한다. 스테인러 트리는 이미 할당된 로봇들의 현재 위치를 터미널 노드로 사용해, 남은 구역을 최소 비용으로 연결하도록 한다. 이렇게 얻어진 트리를 다시 스패닝 트리 변환 후 DFS 순회로 경로를 생성함으로써, 전체 makespan을 최소화한다. 이때 스테인러 트리 비용에 우선 구역 가중치를 포함시키지 않음으로써, 첫 번째 단계에서 달성한 우선순위 목표가 손상되지 않도록 보장한다.
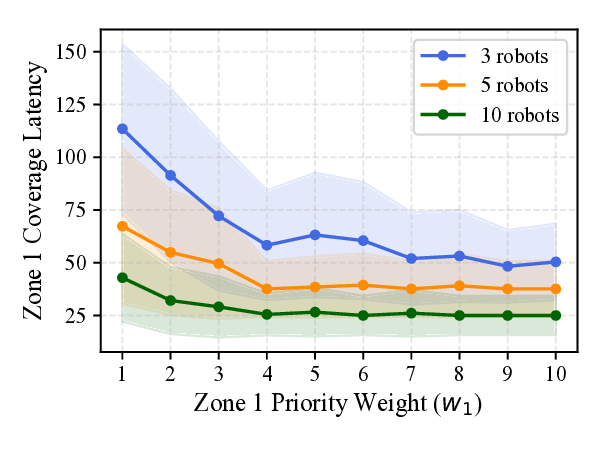
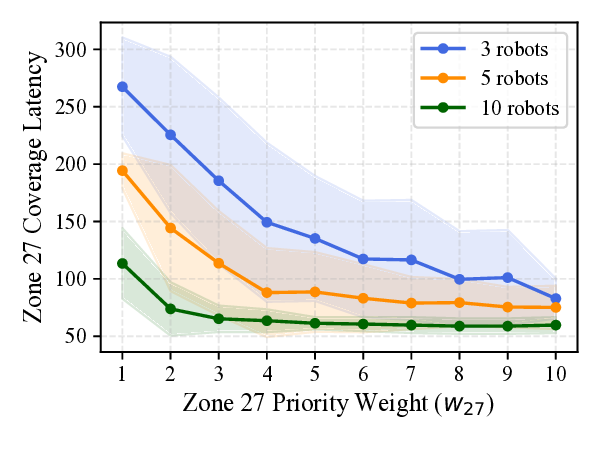
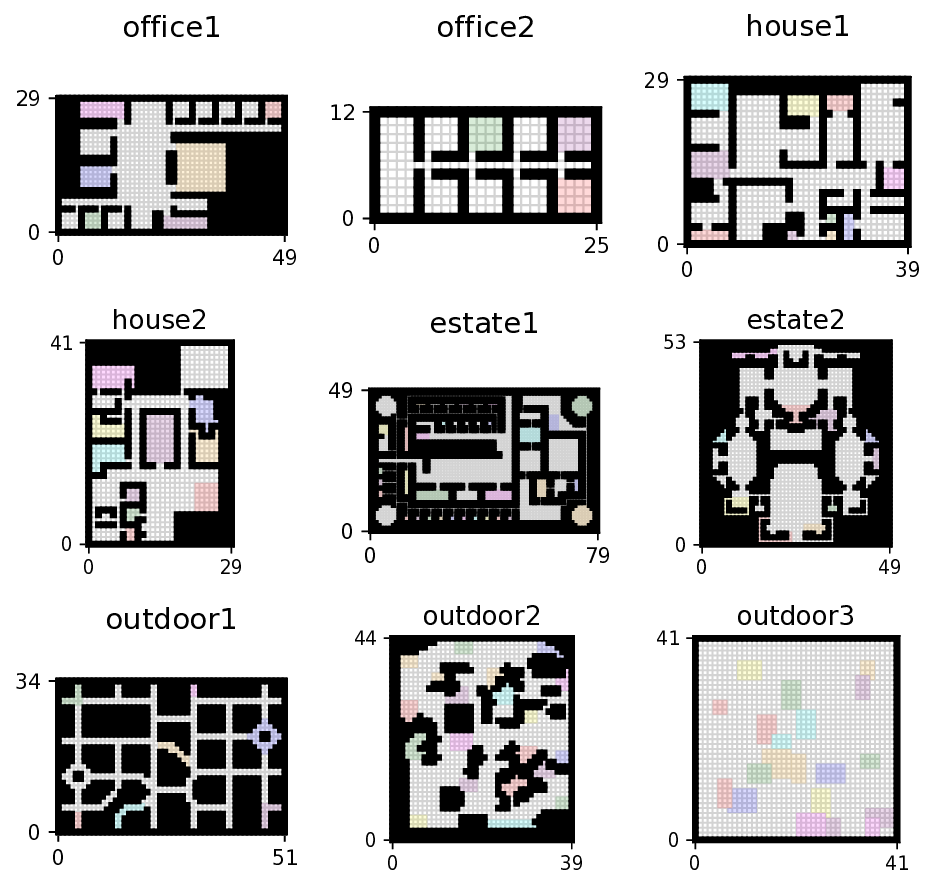
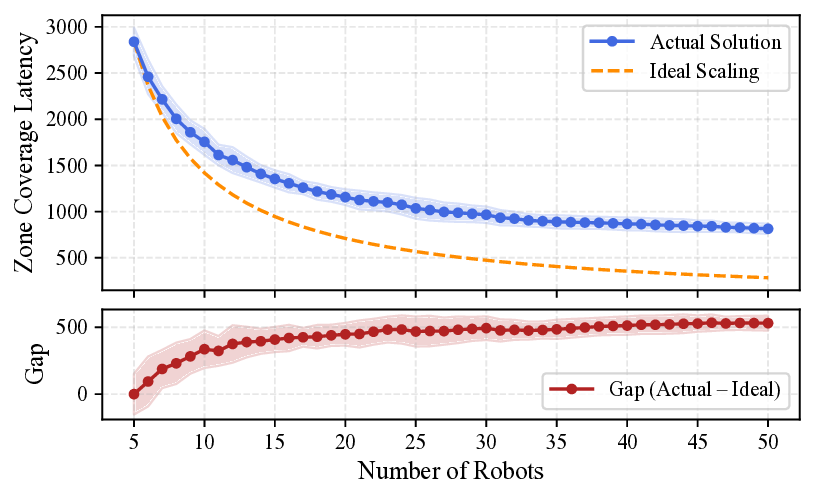
실험에서는 2D 격자 환경, 실제 실내 지도, 그리고 시뮬레이션 기반 3D 복합 환경을 포함한 5가지 시나리오를 사용하였다. 로봇 수를 4, 8, 12대로 변동시키면서 우선 구역 비율(10 %30 %)과 가중치(15)를 조절한 결과, 제안 방법은 기존 “비중복 스패닝 트리 기반 MCPP”와 “분할‑정복 기반 MCPP” 대비 평균 27 % 이상의 우선순위 가중 지연 감소를 달성하였다. 동시에 전체 makespan은 5 % 이내로 차이가 나, 실용적인 시간 효율성을 유지함을 확인했다. 민감도 분석에서는 로봇 수가 증가할수록 우선 구역 커버 시간이 급격히 감소하는 경향을 보였으며, 가중치를 크게 설정할 경우 우선 구역이 거의 독점적으로 할당되어 목표 지연 감소 효과가 극대화되는 것을 관찰했다.
이 논문의 주요 기여는 다음과 같다. 첫째, 우선순위가 부여된 영역을 고려한 새로운 MCPP 목표 함수를 정의하고, 이를 사전순 최적화 형태로 정형화하였다. 둘째, 그리디‑로컬 서치와 스테인러 트리를 결합한 두 단계 프레임워크를 제시해, 우선 구역의 빠른 커버와 전체 작업 시간 최소화를 동시에 달성하였다. 셋째, 다양한 환경과 로봇 규모에 대한 실험을 통해 확장성, 효율성, 그리고 파라미터 조정에 따른 제어 가능성을 입증하였다. 이러한 결과는 재난 대응, 물류 자동화, 정밀 농업 등 우선순위가 명확히 구분되는 실제 응용 분야에 바로 적용될 수 있는 실용적인 솔루션을 제공한다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리