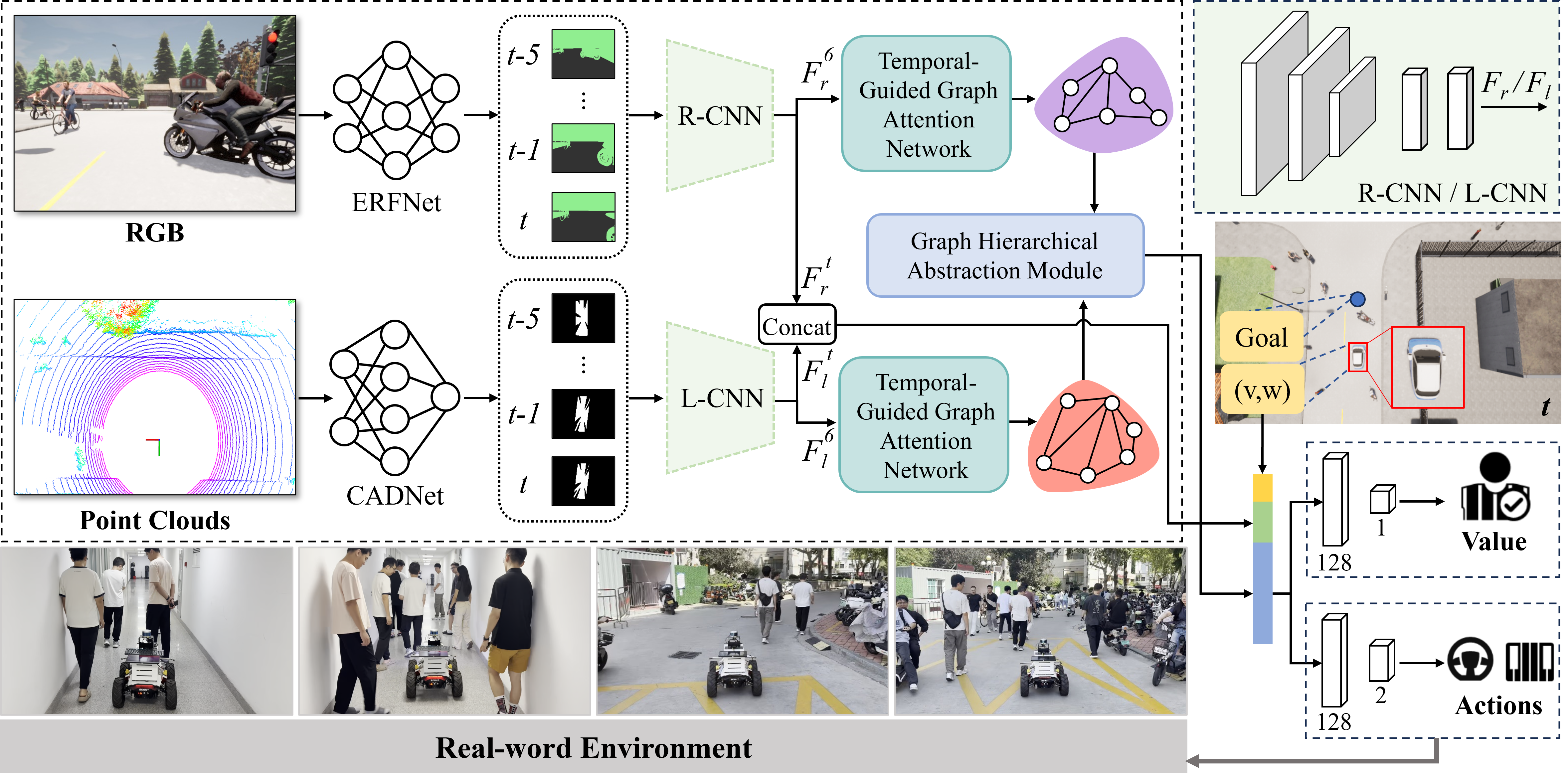
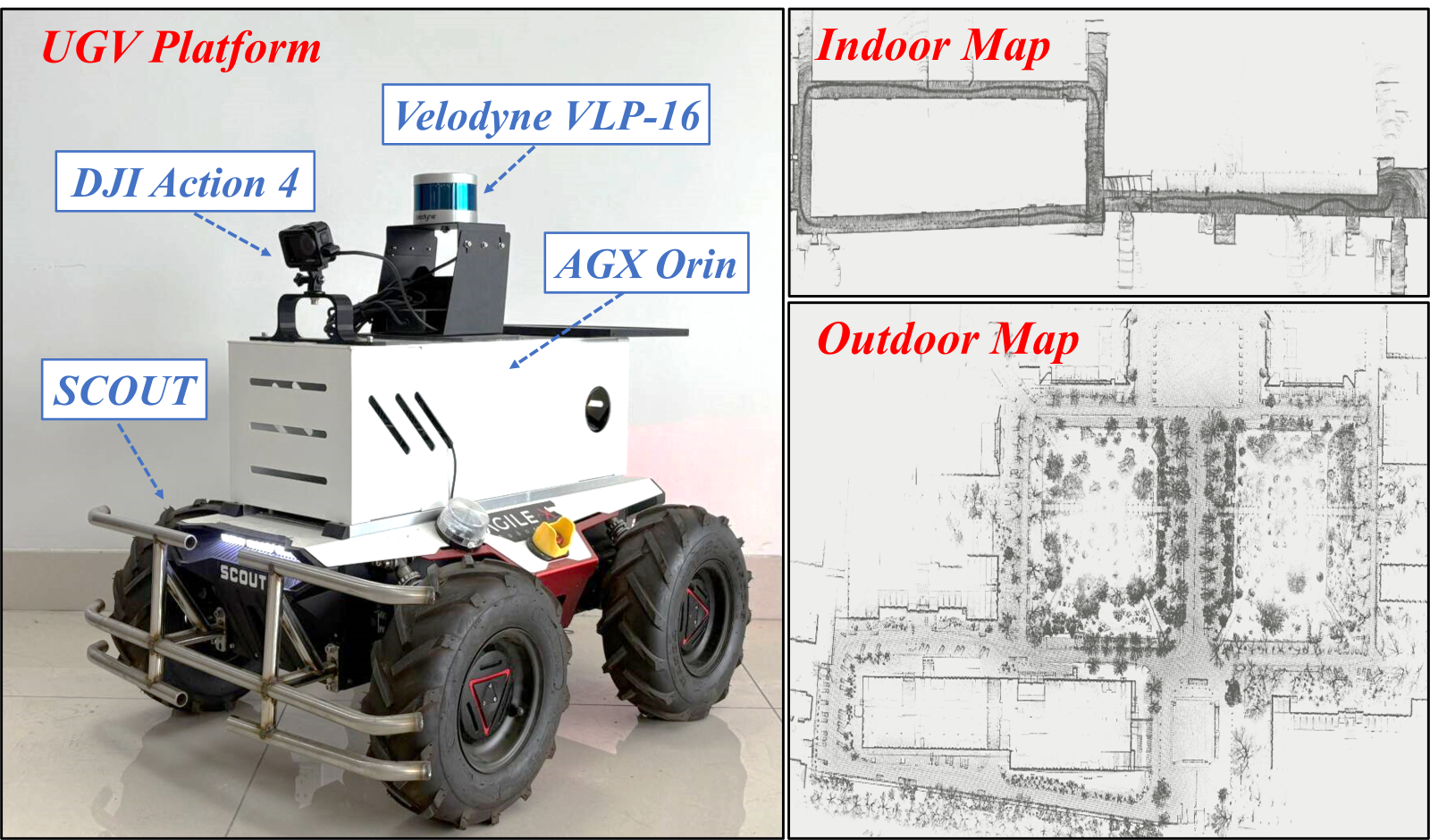
DRL-TH 시공간 그래프 주의와 계층적 융합을 활용한 혼잡 환경 내 UGV 네비게이션
📝 원문 정보
- Title: DRL-TH Jointly Utilizing Temporal Graph Attention and Hierarchical Fusion for UGV Navigation in Crowded Environments- ArXiv ID: 2512.24284
- 발행일: 2025-12-30
- 저자: Ruitong Li, Lin Zhang, Yuenan Zhao, Chengxin Liu, Ran Song, Wei Zhang
📝 초록
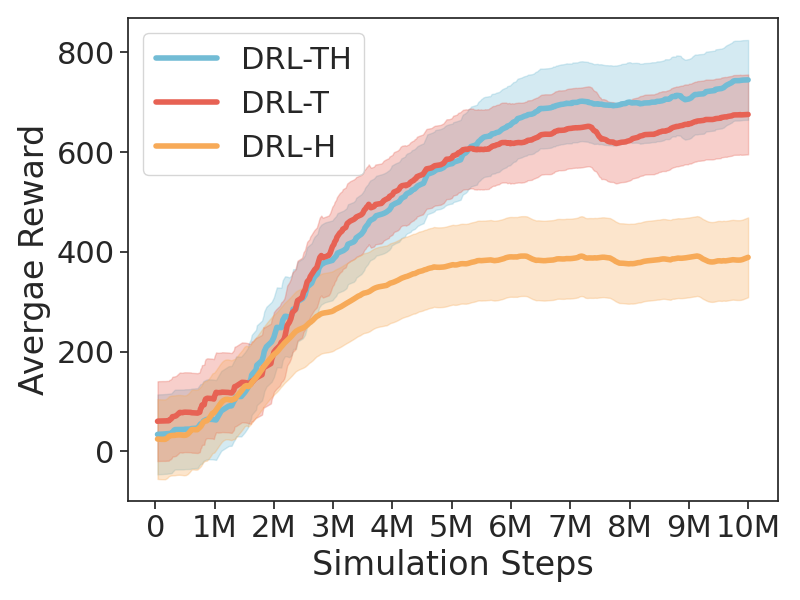
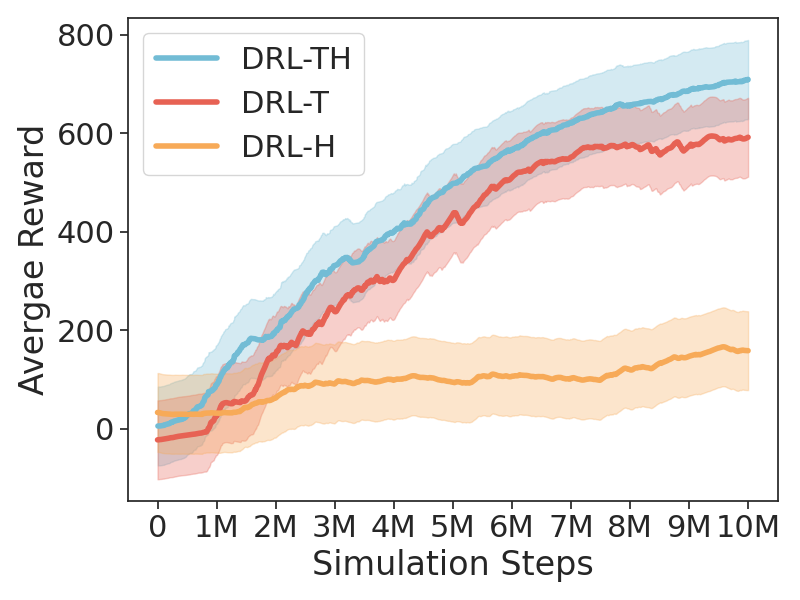
이 논문에서는 3가지 핵심 컨볼루셔널 신경망(CNN) 기반 모델의 성능을 다양한 데이터셋에 걸쳐 시스템적으로 비교하고 있다. 본 연구는 CNN 학습 방법론 중 어떤 것이 가장 효과적인지 파악하기 위해 실험적인 접근 방식을 사용했다.💡 논문 해설
1. **3가지 핵심 모델의 성능 차이:** 이 논문은 커스텀 모델, 트랜스퍼 러닝, 그리고 프리트레이닝된 모델 사이에서 어떤 것이 가장 효과적인지 비교했다. 이를 이해하는 좋은 방법은 각 모델을 자전거에 비유해보는 것이다. 커스텀 모델은 처음부터 만들기 때문에 학습 시간이 길지만, 트랜스퍼 러닝과 프리트레이닝된 모델은 이미 다른 경로에서 배운 것을 활용하여 더 빠르게 도착할 수 있다. 2. **데이터셋에 따른 성능 변화:** 각 모델의 성능은 사용되는 데이터셋에 따라 크게 달라진다. 이는 마치 날씨에 따라 자전거 타기가 얼마나 쉬운지가 달라지는 것과 같다. 좋은 날씨에서는 모든 모델이 잘 작동하지만, 나쁜 날씨에서는 더 강력한 모델이 필요할 수 있다. 3. **실험적 접근 방법:** 이 논문은 실험을 통해 각 모델의 성능을 평가했다. 이를 이해하기 쉽게 말하자면, 자전거를 타는 동안 다양한 경로와 날씨 조건에서 얼마나 잘 작동하는지 시험해본 것과 같다.📄 논문 발췌 (ArXiv Source)
📊 논문 시각자료 (Figures)