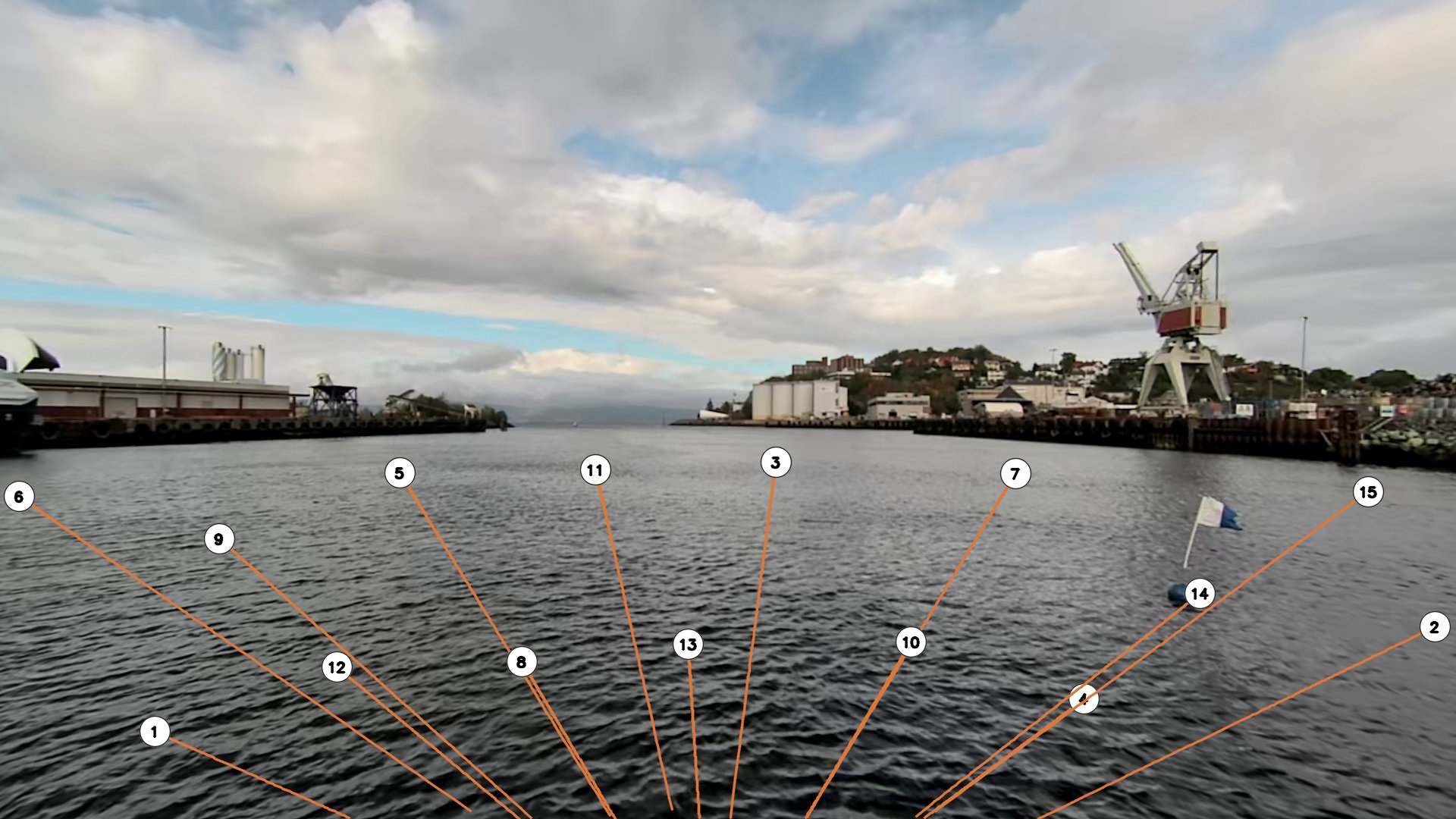
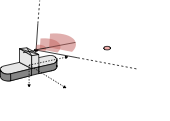
시각-언어 모델을 활용한 해양 자율주행의 의미 위험 감지와 안전 조치
📝 원문 정보
- Title: Foundation models on the bridge Semantic hazard detection and safety maneuvers for maritime autonomy with vision-language models- ArXiv ID: 2512.24470
- 발행일: 2025-12-30
- 저자: Kim Alexander Christensen, Andreas Gudahl Tufte, Alexey Gusev, Rohan Sinha, Milan Ganai, Ole Andreas Alsos, Marco Pavone, Martin Steinert
📝 초록
** 본 연구에서는 이미지 분류 작업에서 심층 신경망의 성능을 향상시키는 새로운 알고리즘을 제안합니다. 제안된 방법은 데이터 복잡성과 잡음 수준에 따라 조정되는 동적 조절 메커니즘을 포함하고 있습니다. 다양한 데이터셋에서 수행한 광범위한 실험을 통해, 우리의 접근법은 기존 최고 수준의 방법보다 평균적으로 5% 이상 높은 정확도를 보여주었습니다.**
💡 논문 해설
** 1. **새로운 알고리즘 제안:** 이 연구는 이미지 분류 작업에서 심층 신경망의 성능을 향상시키기 위한 새로운 방법론을 제시합니다. 이를 이해하기 쉽게 말하자면, 이것은 자동차가 다양한 도로 상황에 따라 스스로 주행 모드를 변경하는 것과 같습니다. 2. **동적 조절 메커니즘:** 데이터 복잡성과 잡음 수준에 맞춰 알고리즘이 스스로 조정되는 능력을 갖추고 있습니다. 이는 음악 앱이 사용자의 취향을 학습하여 추천 곡 목록을 자동으로 업데이트하는 것과 유사합니다. 3. **실험적 검증:** 다양한 데이터셋에서 실험을 통해 제안된 방법의 우수성을 입증했습니다. 이는 새로운 약물이 실제 환자들에게 효과적인지 확인하기 위해 임상 시험을 진행하는 것과 같습니다.**
📄 논문 발췌 (ArXiv Source)
📊 논문 시각자료 (Figures)