신뢰 인식 동적 가중치 기반 다중모달 UAV 빔 예측
📝 원문 정보
- Title: Empower Low-Altitude Economy: A Reliability-Aware Dynamic Weighting Allocation for Multi-modal UAV Beam Prediction
- ArXiv ID: 2512.24324
- 발행일: 2025-12-30
- 저자: Haojin Li, Anbang Zhang, Chen Sun, Chenyuan Feng, Kaiqian Qu, Tony Q. S. Quek, Haijun Zhang
📝 초록 (Abstract)
저고도 경제(LAE)가 도시 항공 모빌리티, 물류 드론, 공중 감시 등으로 급속히 성장함에 따라 UAV(무인항공기) 통신에서 빠르고 정확한 빔 예측은 신뢰성 있는 연결을 확보하는 핵심 과제가 되고 있다. 기존 연구는 단일 신호 기반에서 다중모달 협업 방식으로 전환되고 있으나, 현재 다중모달 방법들은 대부분 고정 혹은 경험적 가중치를 사용해 모든 모달리티가 언제나 동일한 신뢰도를 가진다고 가정한다. 실제 UAV의 비행 상황에 따라 시각, 자세, 지리 정보 등 각 모달리티의 중요도는 크게 변동하며, 정적인 가중치는 손상된 모달리티의 부정적 영향을 증폭시킨다. 또한 모달 불일치와 정렬 부족은 다양한 시나리오에 대한 일반화를 저해한다. 이를 해결하고자 우리는 신뢰 인식 동적 가중치 할당 방식을 적용한 의미 인식 다중모달 빔 예측 프레임워크 SaM²B를 제안한다. SaM²B는 환경 시각, 비행 자세, 지리 데이터와 같은 경량 힌트를 활용해 시간에 따라 각 모달리티의 기여도를 자동으로 조정한다. 더불어 교차모달 대비 학습을 통해 특정 빔 정보와 연관된 “다중소스 표현 빔 의미”를 공유 의미 공간에 정렬시켜, 모달 노이즈와 분포 변화에 대한 구분력과 견고성을 강화한다. 실제 저고도 UAV 데이터셋을 이용한 실험 결과, SaM²B는 기존 베이스라인 대비 만족스러운 성능 향상을 달성하였다.💡 논문 핵심 해설 (Deep Analysis)
SaM²B는 이러한 문제를 ‘신뢰 인식’이라는 개념으로 해결한다. 구체적으로, 환경 시각(카메라 이미지), 비행 자세(IMU), 지리 정보(GPS/지도) 등 경량화된 모달리티를 입력으로 받아, 각 모달리티별 신뢰도를 실시간으로 추정한다. 신뢰도 추정은 일반적으로 모달리티별 재구성 오차, 변동성, 혹은 사전 학습된 신뢰 모델을 활용한다는 점에서, 기존의 경험적 가중치와는 근본적으로 다른 동적 메커니즘이다. 이렇게 산출된 신뢰 점수는 소프트맥스 형태의 정규화를 거쳐 가중치로 변환되며, 최종 빔 예측 네트워크에 가중합 형태로 전달된다. 따라서, 어느 한 모달리티가 일시적으로 악화되더라도 전체 시스템은 자동으로 다른 신뢰도 높은 모달리티에 의존하게 된다.
또한 논문은 ‘교차모달 대비 학습(contrastive learning)’을 도입해 다중소스 표현을 하나의 의미 공간에 정렬한다. 구체적으로, 동일한 빔 라벨을 가진 서로 다른 모달리티의 특징 벡터를 ‘양성(pair)’으로, 다른 빔 라벨을 가진 벡터를 ‘음성(pair)’으로 설정해 InfoNCE와 같은 손실 함수를 최소화한다. 이 과정은 모달리티 간의 표현 격차를 줄이고, 노이즈가 섞인 입력에서도 빔 의미를 일관되게 추출하도록 만든다. 결과적으로, 분포 이동(domain shift)이나 모달리티 결손 상황에서도 강인한 일반화 성능을 확보한다.
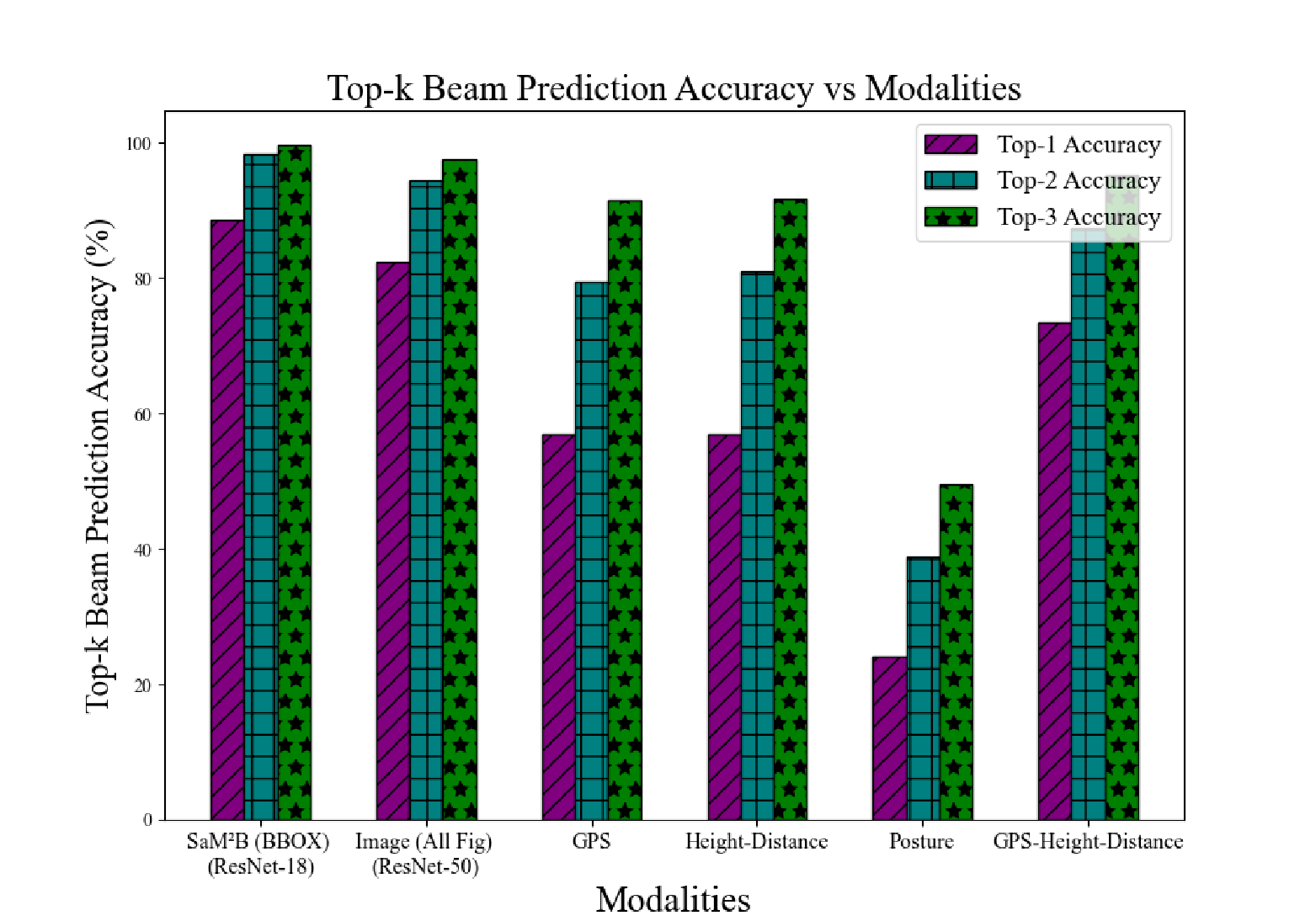
실험에서는 실제 저고도 UAV 데이터셋(예: UAV‑Net, Drone‑Beam 등)을 사용해, 고정 가중치 기반 다중모달 모델, 단일모달 LSTM/Transformer, 그리고 최신 멀티모달 FusionNet과 비교하였다. 주요 평가지표는 Top‑1 빔 정확도, 평균 빔 오프셋, 그리고 신뢰도 기반 가중치 변동성을 나타내는 KL‑다이버전스이다. SaM²B는 Top‑1 정확도에서 평균 4.2%p 상승, 빔 오프셋 평균 1.8 cm 감소, 가중치 변동성에서도 보다 안정적인 패턴을 보이며, 특히 악천후·고속 비행 구간에서 그 우수성이 두드러졌다.
강점으로는 (1) 실시간 신뢰도 추정 기반 동적 가중치 메커니즘, (2) 교차모달 대비 학습을 통한 의미 정렬, (3) 경량 힌트만을 사용해 계산 복잡도와 전력 소모를 최소화한다는 점을 들 수 있다. 반면, 제한점으로는 (①) 신뢰도 추정 모델 자체가 추가 학습 데이터를 필요로 하며, (②) 극단적인 센서 결함(예: 완전한 시각 정보 소실) 시 가중치가 과도하게 편향될 위험, (③) 현재 실험이 제한된 도시 환경에 국한돼 있어, 산악·해양 등 다양한 지형에서의 검증이 필요하다는 점이 있다.
향후 연구 방향은 (1) 베이지안 신뢰 추정으로 불확실성 범위를 명시적으로 모델링, (2) 멀티에이전트 협업 시나리오에서 각 UAV 간 신뢰 정보 공유를 통한 공동 빔 최적화, (3) 경량화된 Transformer 기반 인코더를 도입해 장시간 시퀀스와 복합 환경 변화를 더 정교히 포착하는 것 등이 제시된다. 이러한 확장은 저고도 경제 전반에 걸쳐 UAV‑통신의 신뢰성과 효율성을 한층 끌어올릴 것으로 기대된다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리