의도와 행동가능성 포화에 대한 추론 기반 의사결정 구조
📝 원문 정보
- Title: An Inference-Based Architecture for Intent and Affordance Saturation in Decision-Making
- ArXiv ID: 2512.23144
- 발행일: 2025-12-29
- 저자: Wendyam Eric Lionel Ilboudo, Saori C Tanaka
📝 초록 (Abstract)
결정 마비(주저, 동결, 행동 실패)는 선택지가 이미 명시되고 즉시 비교될 수 있다고 가정하는 전통적 선택 모델에 큰 도전을 제기한다. 자폐 스펙트럼 연구에서 보고된 질적 사례들을 중심으로, 우리는 마비가 계층적 의사결정 과정에서 수렴 실패로 발생한다는 계산적 설명을 제시한다. 목표를 무엇으로 할지 결정하는 ‘의도 선택’과 그 목표를 어떻게 달성할지 결정하는 ‘행동가능성 선택’을 구분하고, 역 KL(Reverse‑KL)과 순방향 KL(Forward‑KL) 목표의 혼합 하에서 추론을 수행함으로써 ‘헌신’을 공식화한다. 역 KL은 모드 탐색에 유리해 빠른 헌신을 촉진하고, 순방향 KL은 모드 포괄에 초점을 맞춰 다수의 잠재적 목표·행동을 유지한다. 정적 모델과 동적(드리프트‑디퓨전) 모델 모두에서 순방향 KL 편향 추론은 응답 시간이 느리고 꼬리가 두꺼운 분포를 만들며, 가치가 유사할 때 ‘의도 포화’와 ‘행동가능성 포화’라는 두 가지 고유 실패 양상을 초래한다. 다옵션 과제 시뮬레이션은 결정 관성 및 시스템 셧다운의 핵심 특징을 재현하며, 자폐를 일반적인 추론 기반 의사결정 연속체의 극단적 상태로 해석한다.💡 논문 핵심 해설 (Deep Analysis)
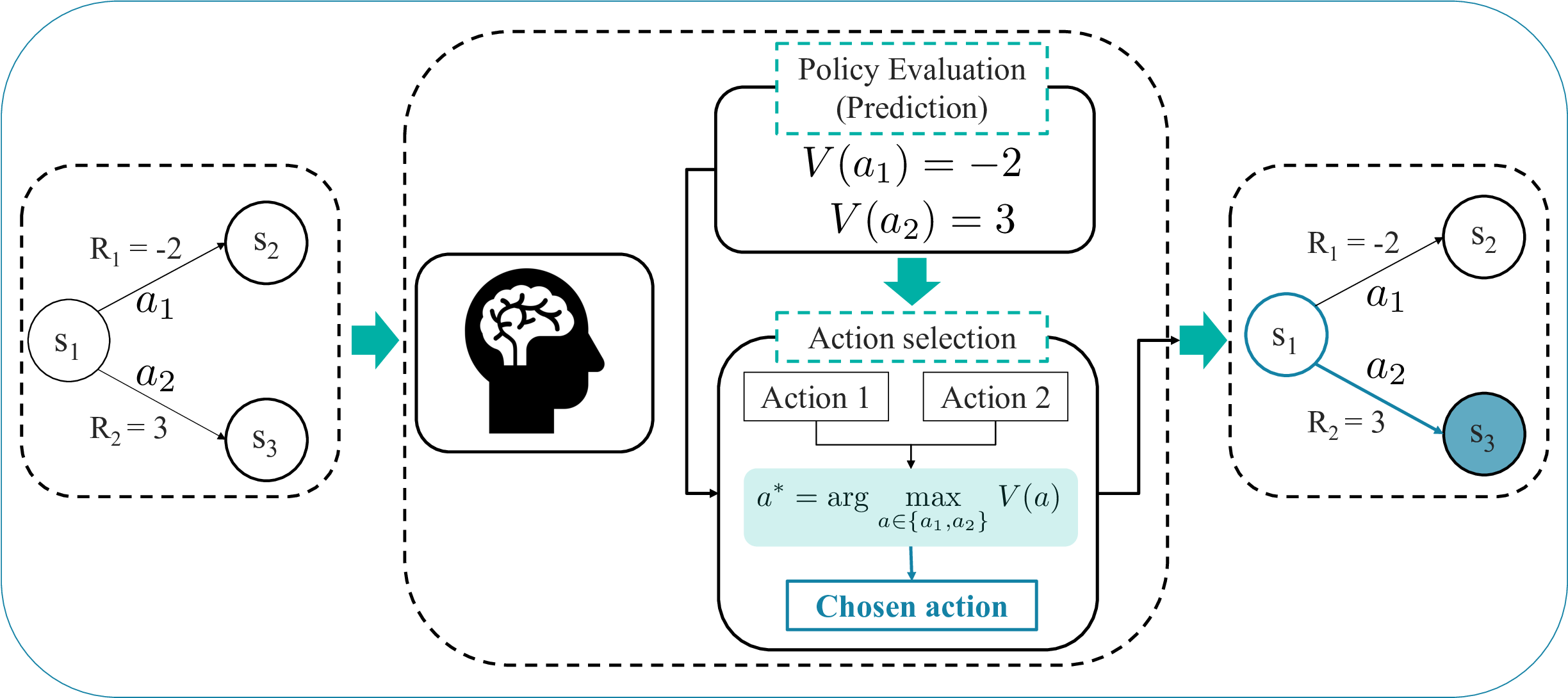
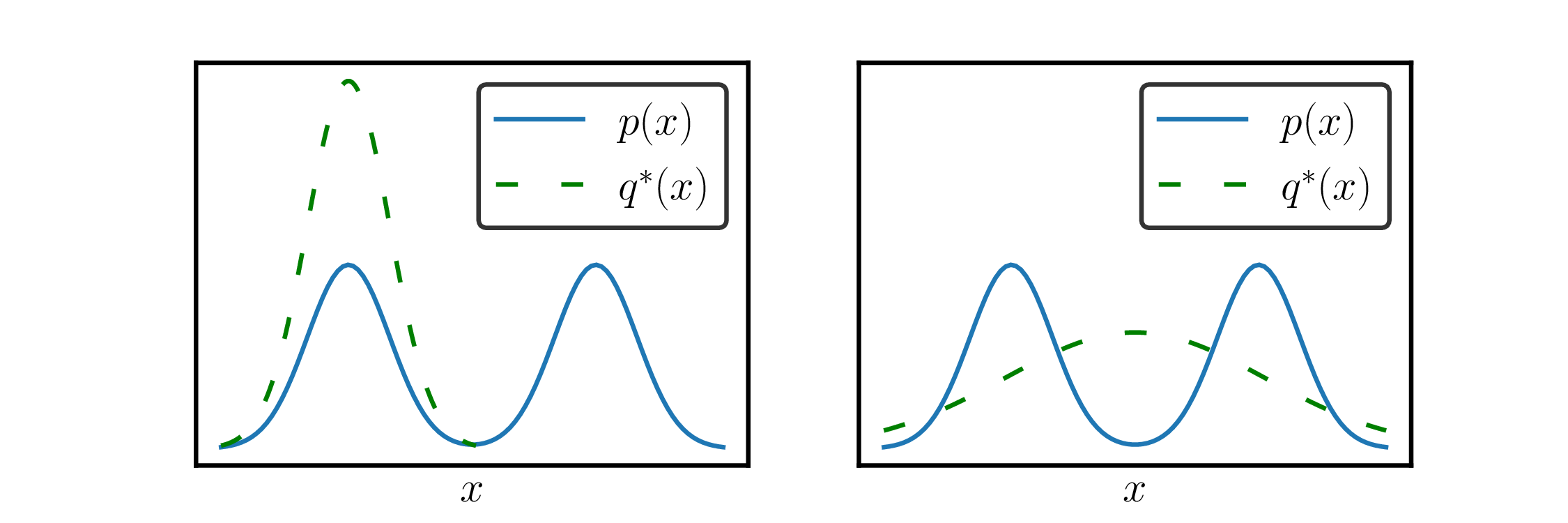
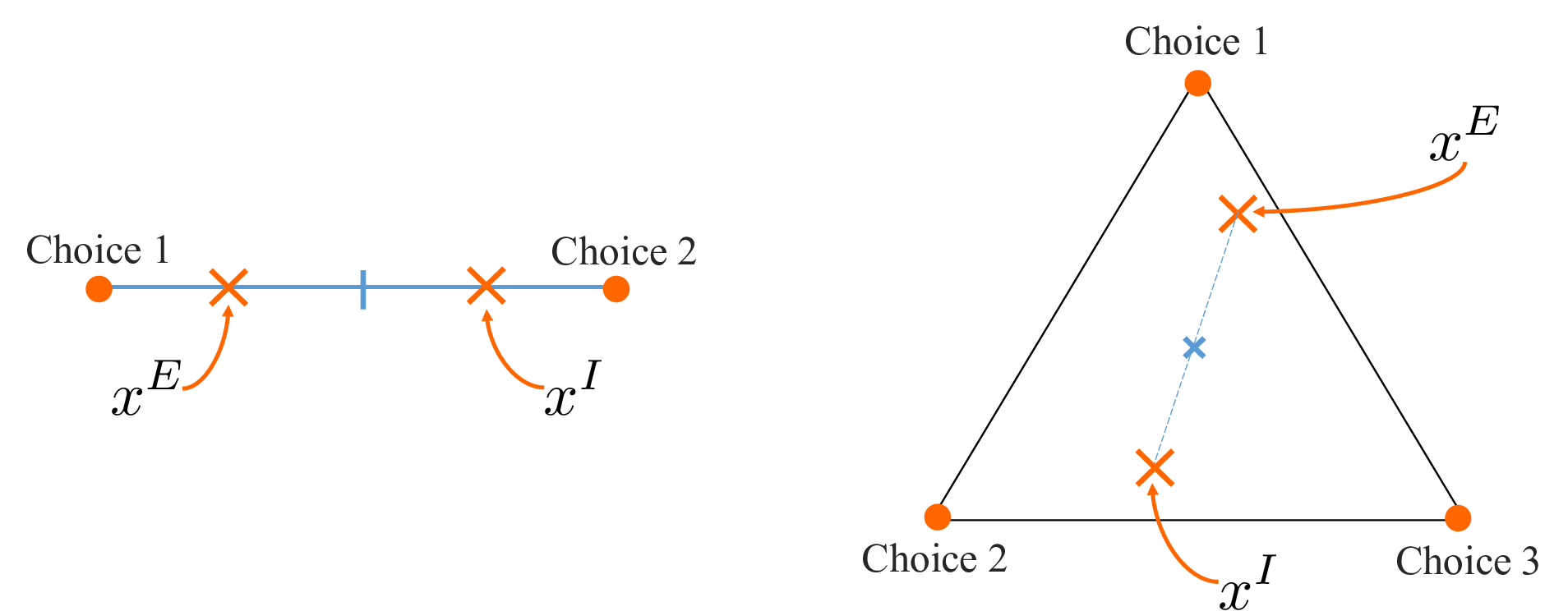
이러한 구조적 차이를 수학적으로 모델링하기 위해 저자들은 KL 발산의 두 변형을 도입한다. 역 KL( KL(q‖p) )은 ‘모드‑시킹(mode‑seeking)’ 특성을 가지고 있어, 확률 질량이 집중된 몇몇 후보에 빠르게 헌신하도록 만든다. 반면 순방향 KL( KL(p‖q) )은 ‘모드‑커버링(mode‑covering)’ 특성을 띠어, 가능한 후보들을 골고루 유지하면서 신중히 판단한다. 의도 단계에서는 빠른 결정을 위해 역 KL 비중이 높게 설정될 수 있지만, 목표 간 가치 차이가 미미할 경우 순방향 KL이 우세해지면서 의도 선택이 수렴하지 못하고 ‘의도 포화(intent saturation)’가 발생한다. 이때 의도에 대한 확신이 부족해 의사결정이 정체된다.
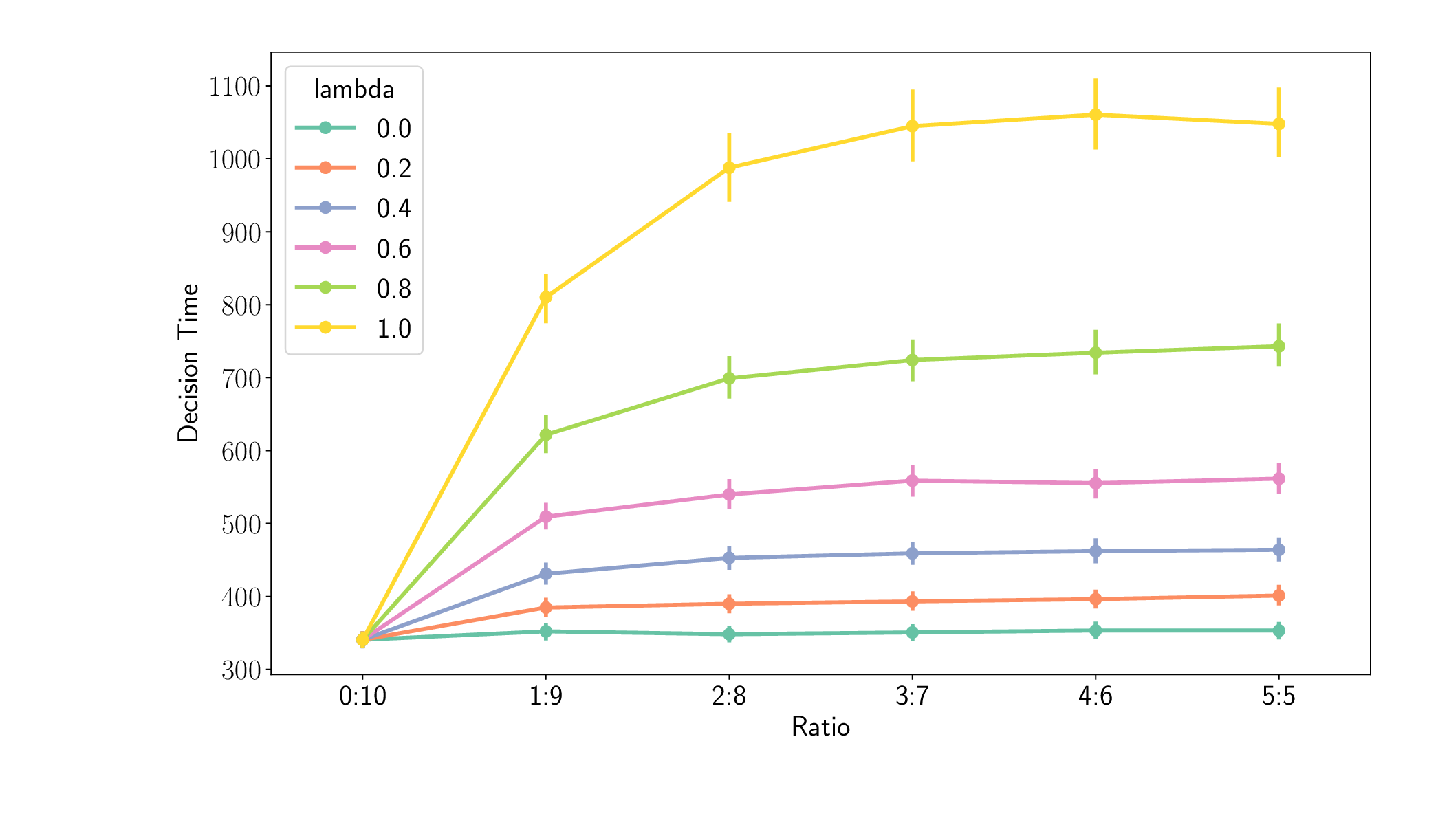
행동가능성 단계에서는 이미 의도가 확정된 뒤 다수의 실행 옵션이 존재한다. 여기서 순방향 KL이 지배하면 여러 행동 경로를 동시에 고려하게 되고, 특히 옵션 간 비용·보상이 비슷할 경우 ‘행동가능성 포화(affordance saturation)’가 일어나 실행 단계에서도 마비가 지속된다. 저자들은 이 현상을 정적 확률 모델뿐 아니라 드리프트‑디퓨전(DDM)과 같은 동적 누적 증거 모델에 적용하여, 순방향 KL 편향이 증거 누적 속도를 감소시키고 반응 시간 분포가 지수적이 아닌 파레토형(heavy‑tailed) 꼬리를 갖게 만든다고 보인다.
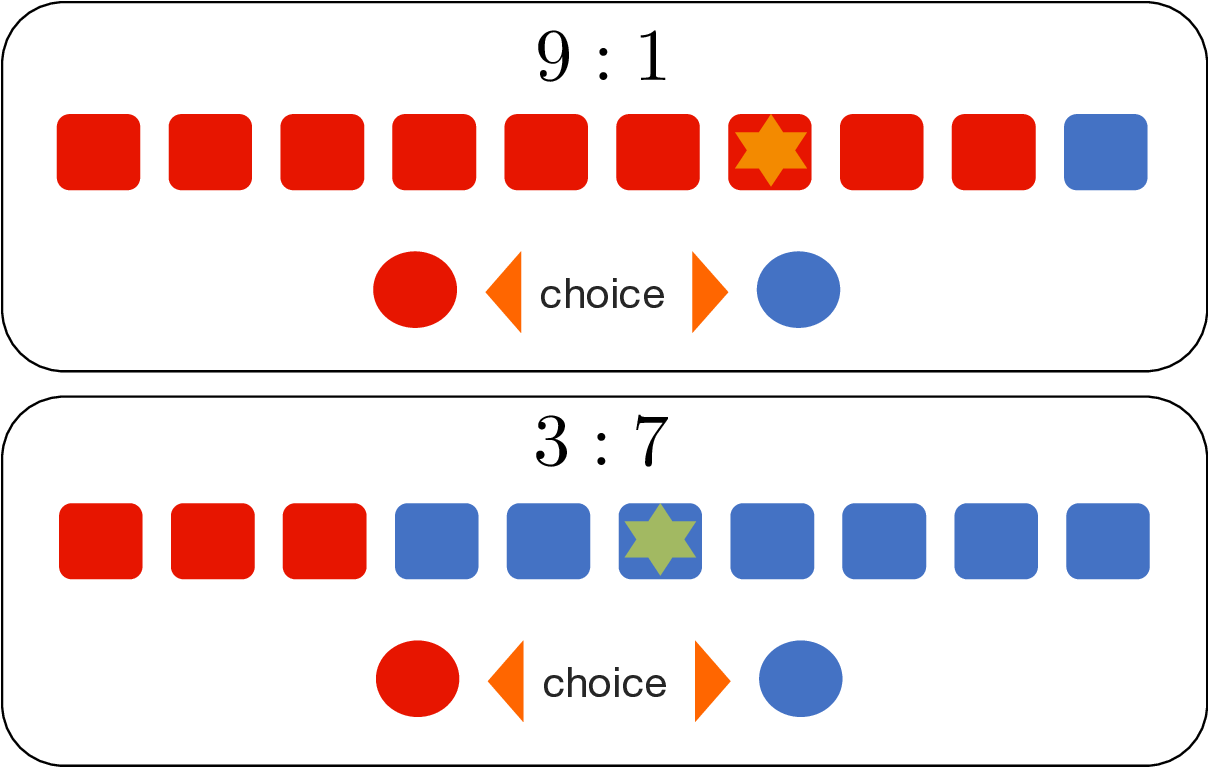
시뮬레이션 결과는 다옵션 선택 과제에서 의도와 행동가능성 포화가 각각 다른 시점에 나타나며, 이는 ‘결정 관성(decision inertia)’과 ‘시스템 셧다운(system shutdown)’이라는 두 가지 행동 양상으로 귀결된다. 특히 ASD 참가자들의 데이터를 모델링했을 때, 역 KL 대비 순방향 KL 비중이 크게 증가된 파라미터 설정이 가장 잘 맞아, 자폐를 ‘추론 기반 의사결정 연속체’에서 순방향 KL이 과도하게 강조되는 극단적 지점으로 해석한다.
이러한 접근은 기존의 ‘가치‑기반’ 혹은 ‘규칙‑기반’ 모델을 넘어, 불확실성 하에서의 추론 메커니즘 자체가 의사결정 마비를 일으킬 수 있음을 시사한다. 또한 KL 발산의 두 변형을 의도·행동가능성 단계에 맞게 조절함으로써, 인간‑컴퓨터 인터페이스 설계, 임상 진단, 그리고 인공지능 에이전트의 의사결정 모듈에 적용 가능한 새로운 설계 원칙을 제공한다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리