동적 주의 트랜스포머 기반 이상행동 탐지를 통한 안전 플래토닝
📝 원문 정보
- Title: Attention in Motion: Secure Platooning via Transformer-based Misbehavior Detection
- ArXiv ID: 2512.15503
- 발행일: 2025-12-17
- 저자: Konstantinos Kalogiannis, Ahmed Mohamed Hussain, Hexu Li, Panos Papadimitratos
📝 초록 (Abstract)
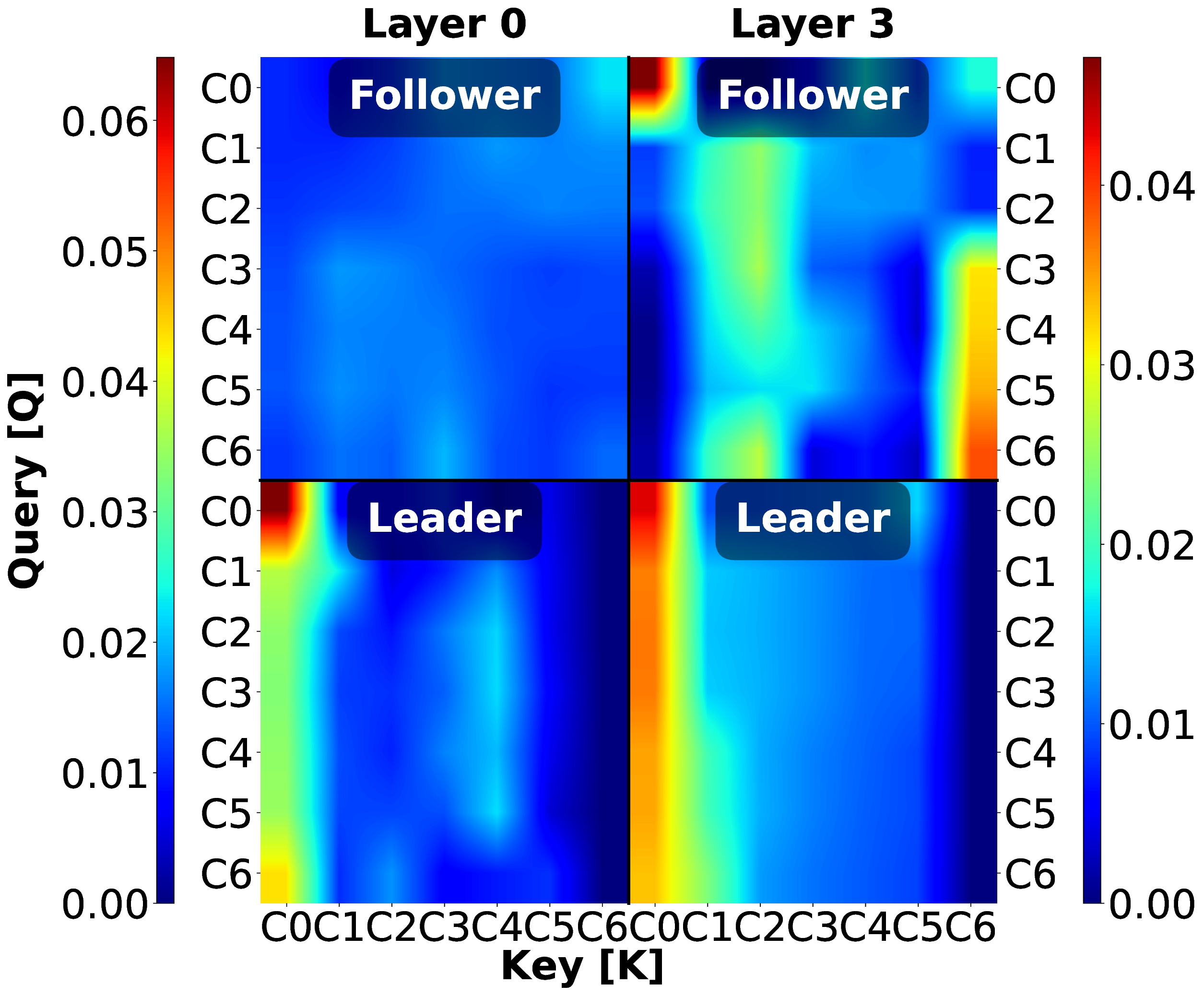
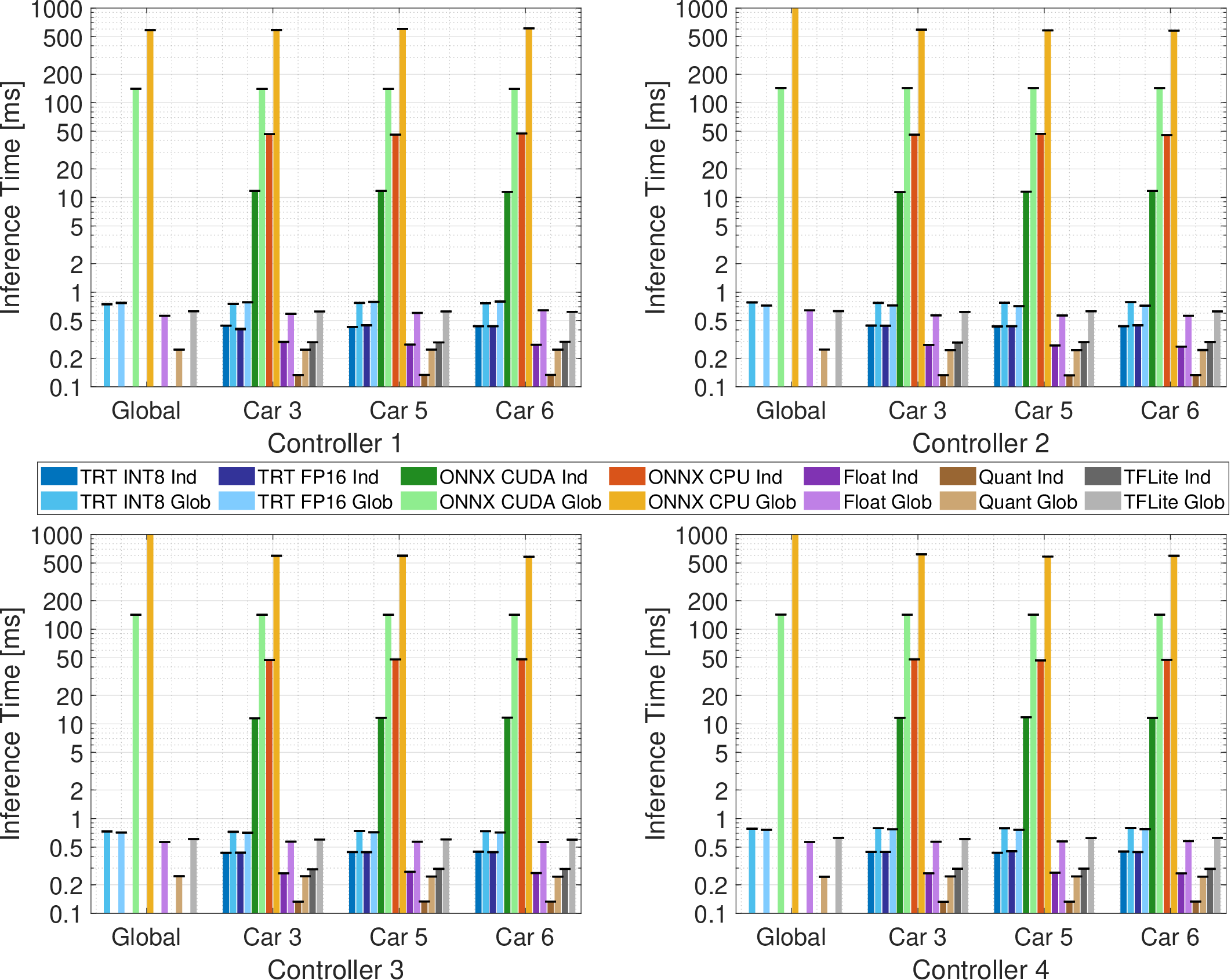
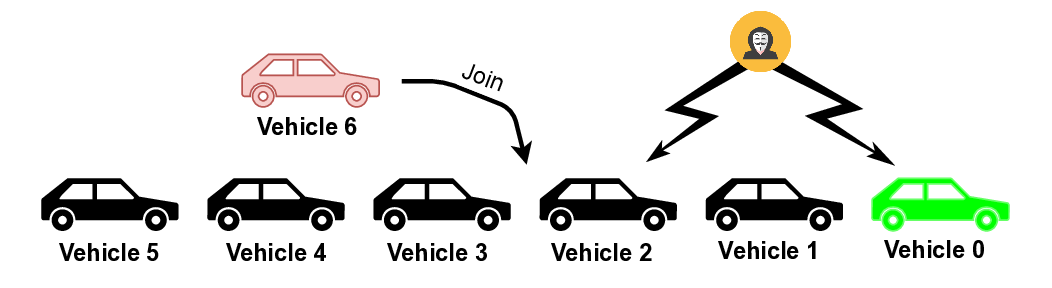
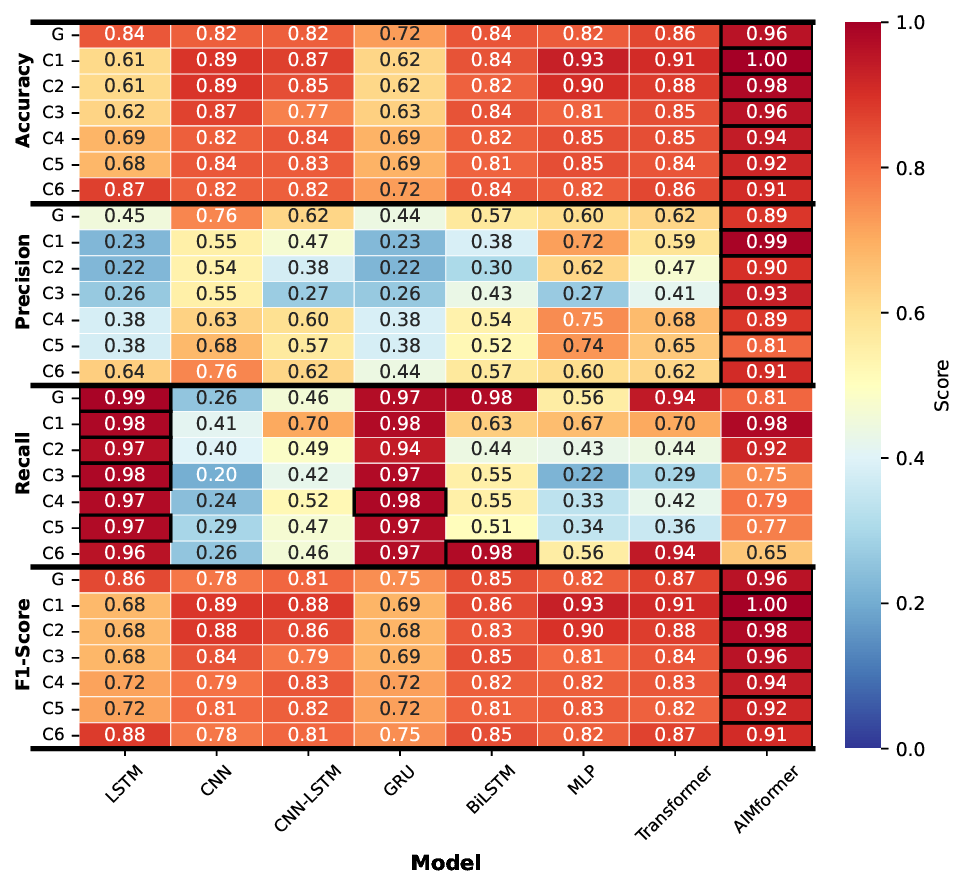
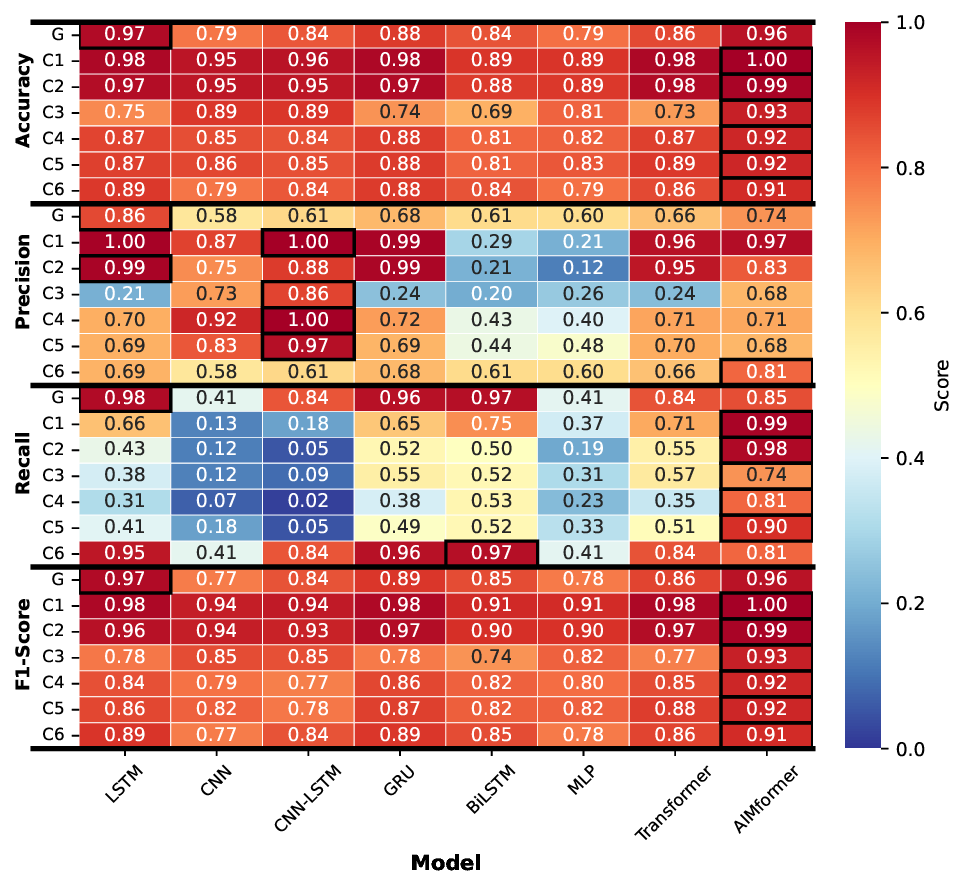
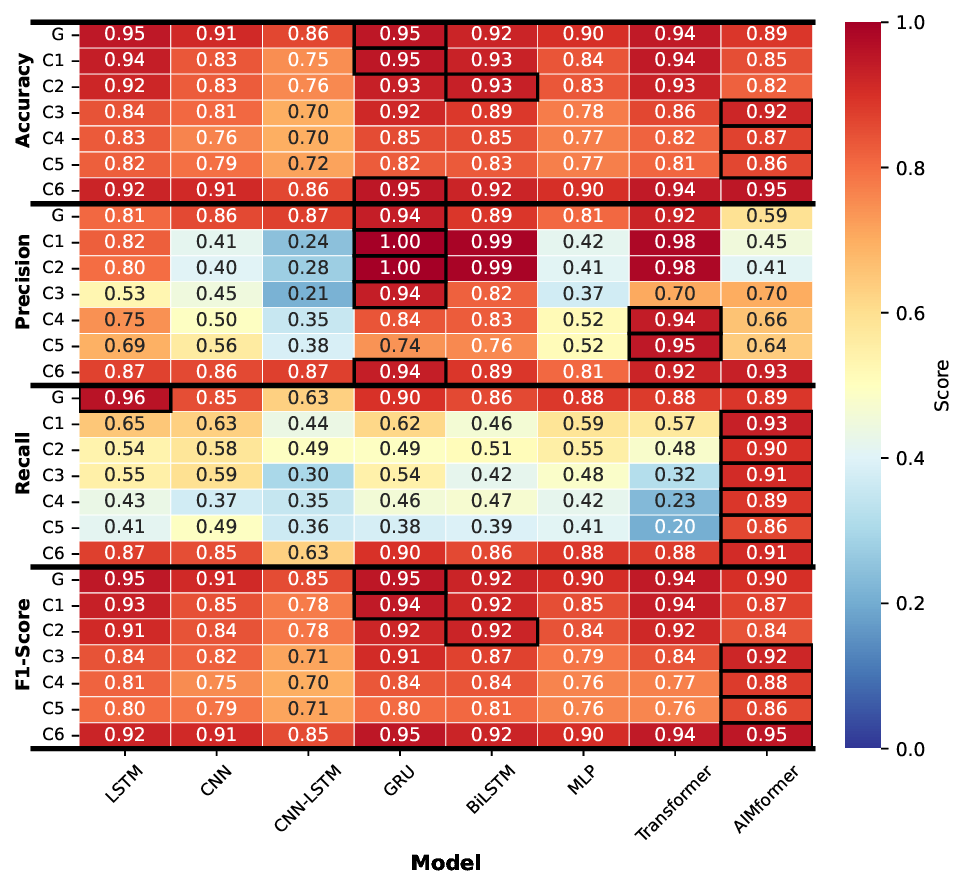
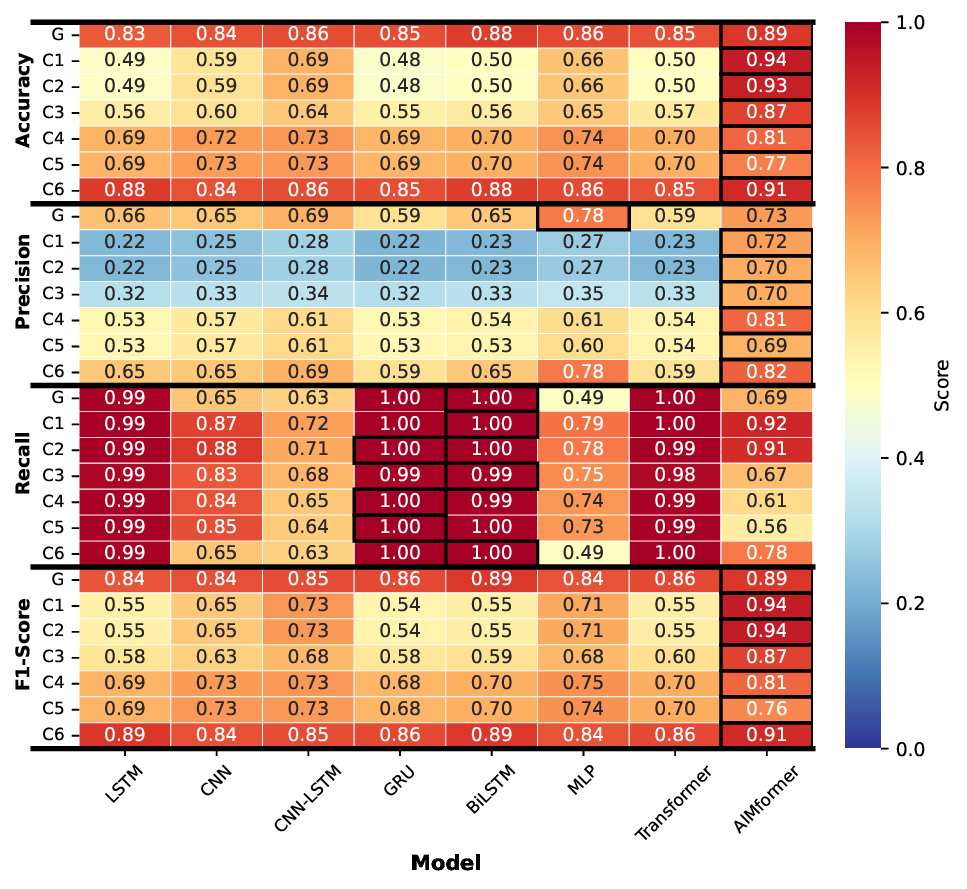
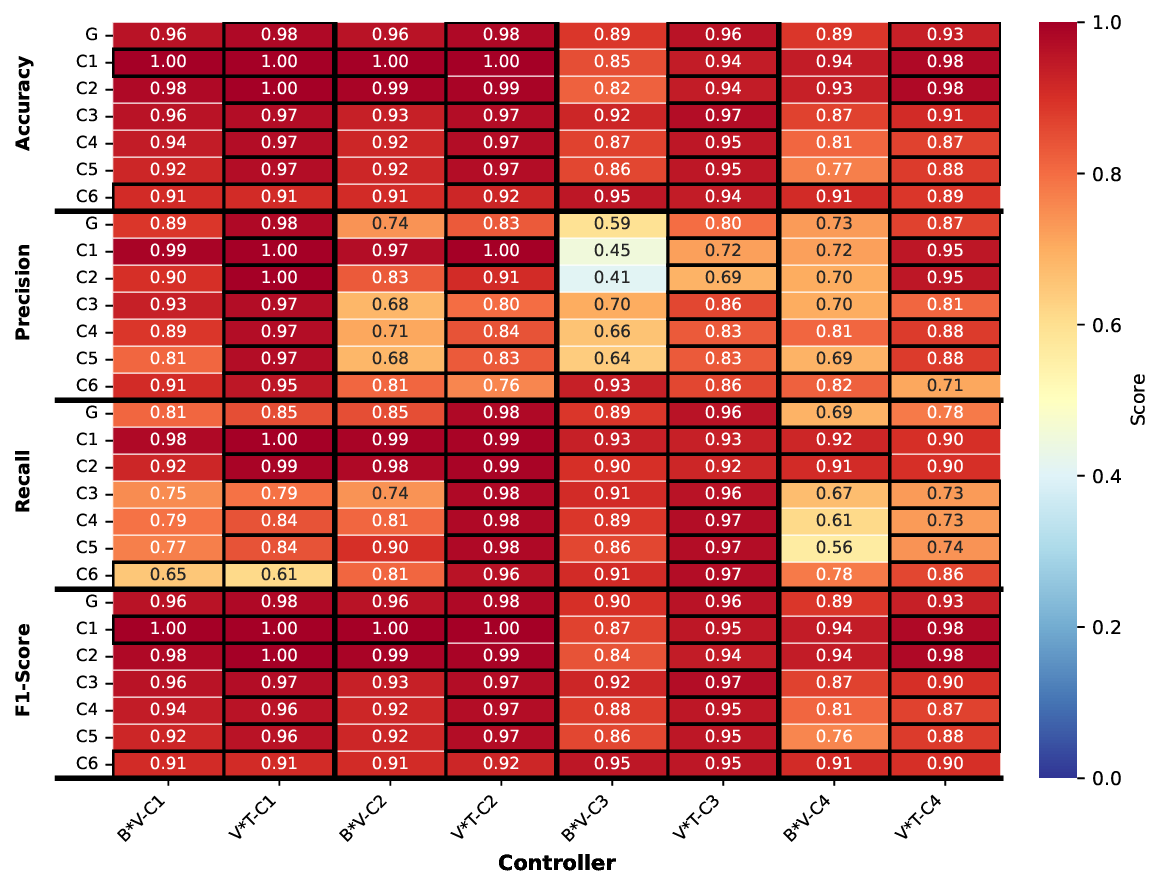
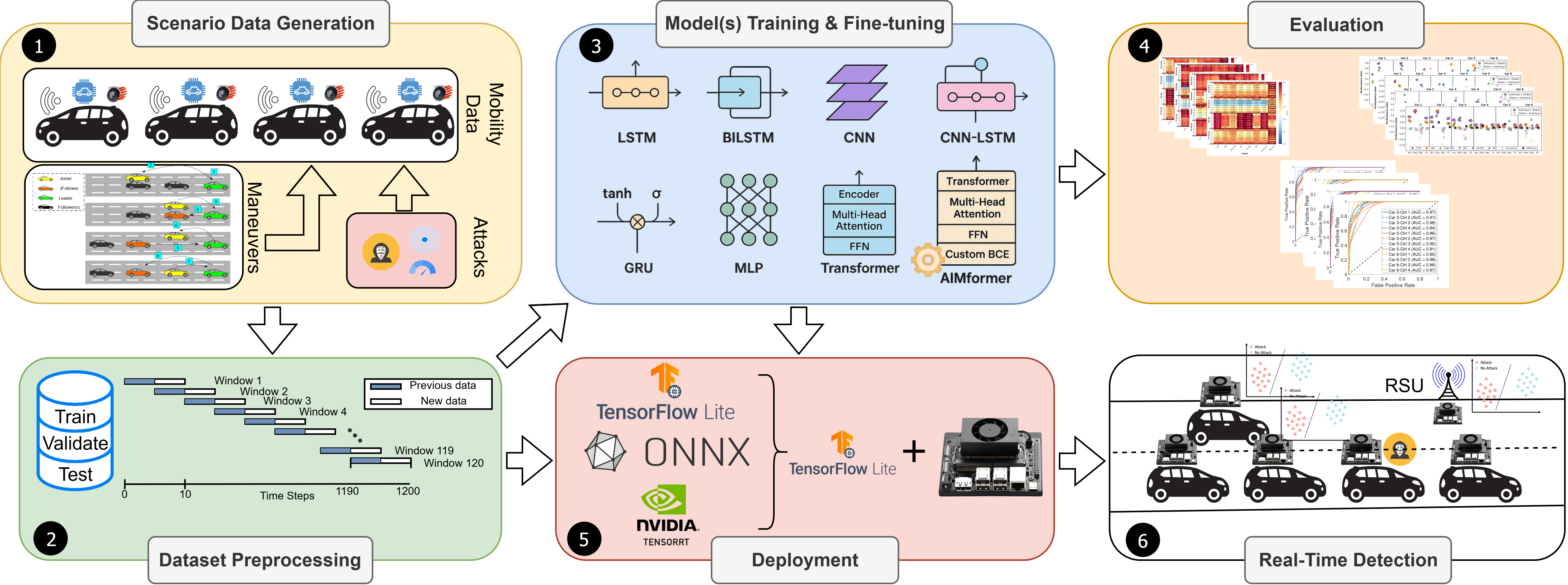
차량 간 협업을 가능하게 하는 V2X 통신으로 효율성과 안전성을 크게 향상시킬 수 있는 차량 플래토닝은, 분산된 제어 구조 때문에 인증된 차량이 허위 운동 데이터를 주입해 플래토닝의 안정성을 위협하는 보안 취약점에 노출된다. 기존의 플래그 검증·통계 기반 탐지 방식은 높은 오탐률을 보이며, 다차량 협조 동작에서 나타나는 복잡한 시간‑공간 상관관계를 포착하지 못한다. 본 논문은 실시간 이상행동 탐지를 위해 설계된 트랜스포머 기반 프레임워크 AIMFORMER를 제안한다. 다중 헤드 셀프‑어텐션을 이용해 개별 차량의 시간적 변화를 동시에 학습하고, 차량 간 공간적 연관성을 모델링한다. 차량 진입·이탈을 고려한 전역 위치 인코딩과 차량별 시간 오프셋을 도입해 동적 플래토닝 환경에 대응한다. 또한 안전‑중심 시스템에 맞춰 오탐을 크게 벌점하는 Precision‑Focused Binary Cross‑Entropy 손실 함수를 설계하였다. 4가지 플래토닝 제어기, 다양한 공격 시나리오, 여러 이동성 환경에서 수행한 광범위한 실험 결과, 기존 최첨단 모델 대비 0.93 이상의 검출 성능을 달성하였다. TensorFlow Lite, ONNX, TensorRT 기반의 경량화 및 최적화 실험을 통해 서브‑밀리초 수준의 추론 지연을 확인했으며, 이는 차량 내부 혹은 도로 인프라의 제한된 엣지 장치에서도 실시간 운영이 가능함을 입증한다.💡 논문 핵심 해설 (Deep Analysis)
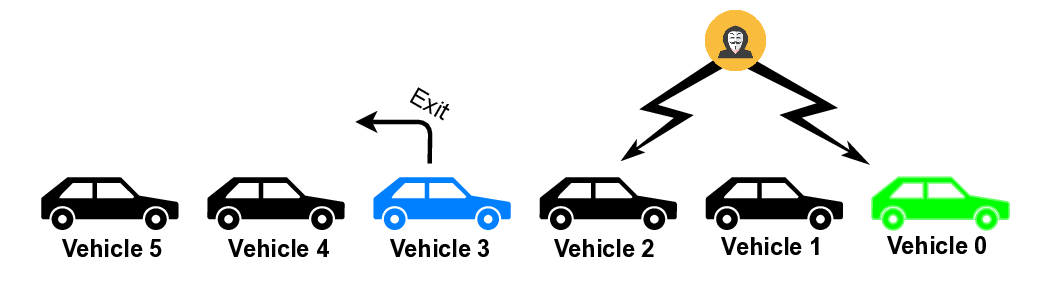
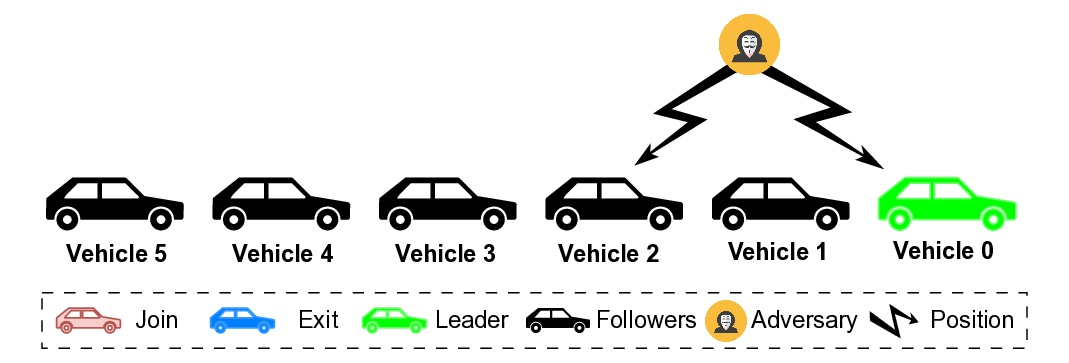
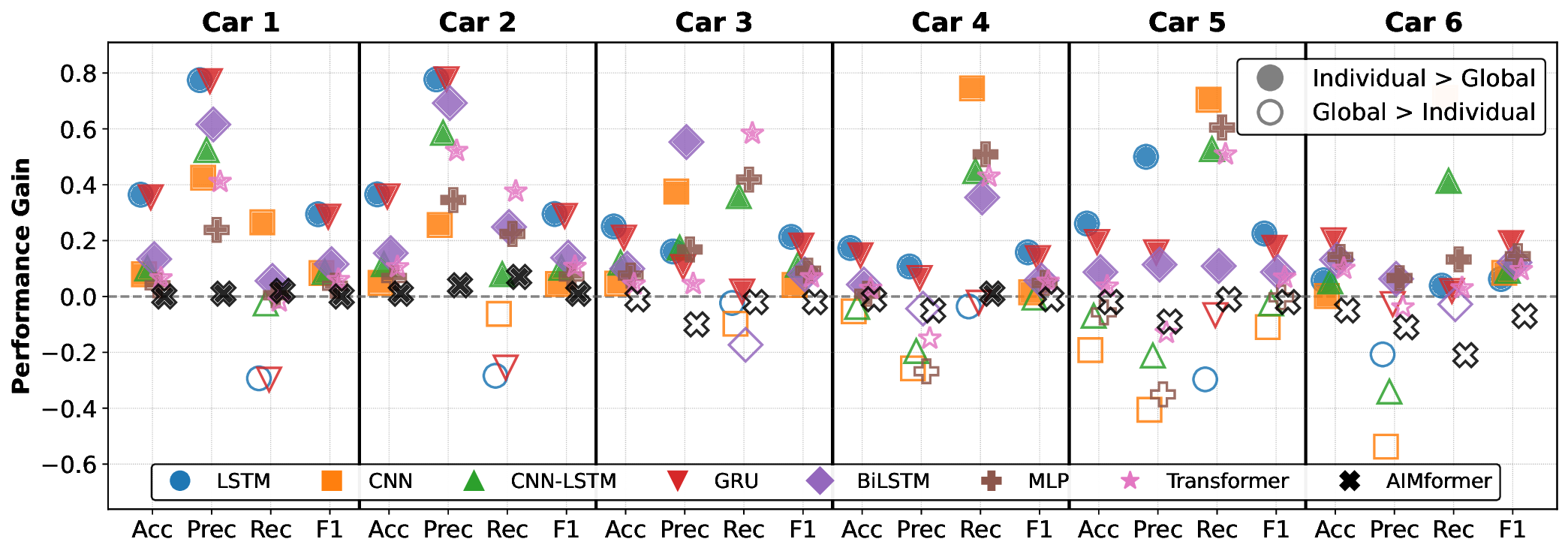
논문에서 제안한 “전역 위치 인코딩(Global Positional Encoding)”은 전통적인 순차 인코딩을 넘어, 차량이 플래토닝에 합류하거나 탈퇴하는 이벤트를 시간 오프셋으로 모델링한다. 이는 플래토닝이 동적으로 구성·해체되는 실제 도로 상황을 반영한 설계로, 기존 고정‑길이 시퀀스 모델이 겪는 ‘시퀀스 길이 불일치’ 문제를 완화한다.
손실 함수 측면에서 저자는 Precision‑Focused Binary Cross‑Entropy(PFBCE)를 도입했다. 안전‑중심 시스템에서는 False Positive(FP)가 운전자의 불신을 초래하고, 불필요한 제어 개입으로 오히려 위험을 가중시킬 수 있다. PFBCE는 FP에 가중치를 크게 부여해 모델이 FP를 최소화하도록 유도한다. 실험 결과, 동일한 Recall 수준에서 기존 BCE 대비 FP 비율이 30% 이상 감소했으며, 전체 F1‑Score가 0.94에 달했다.
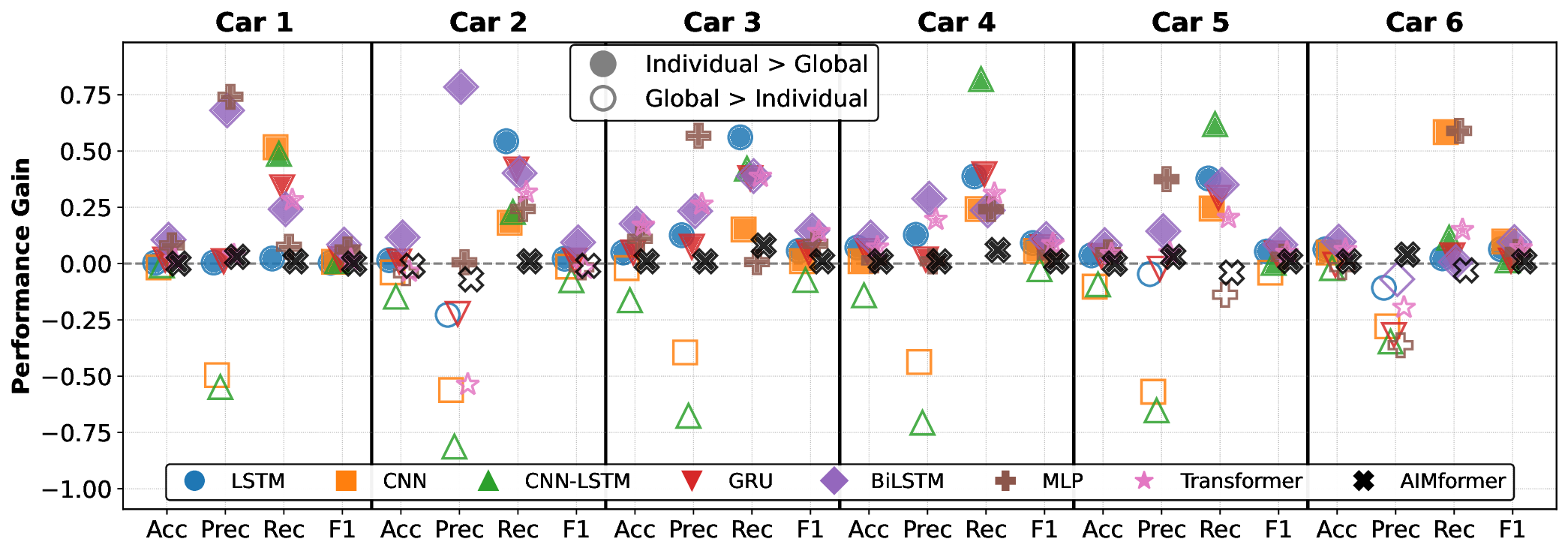
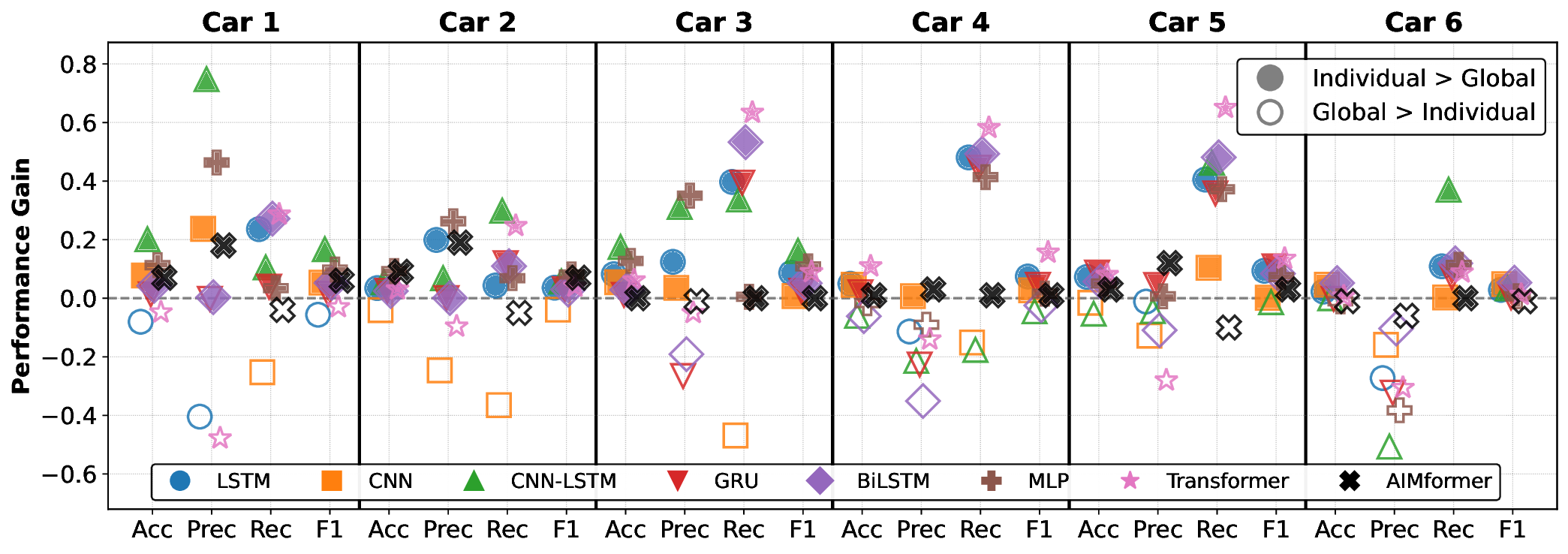
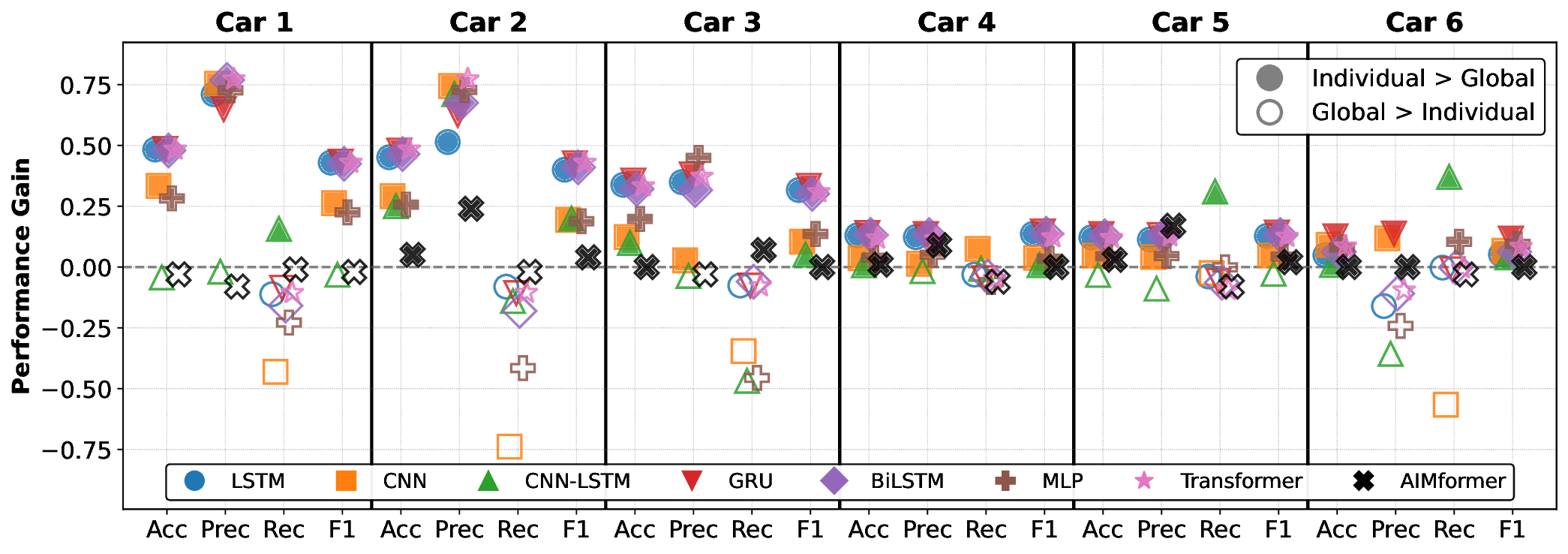
평가에서는 4가지 대표적인 플래토닝 컨트롤러(예: CACC, MPC 기반, 협력형 ACC, 그리고 혼합형)와 3가지 공격 벡터(데이터 변조, 시간 동기화 공격, 그리고 차량 간 협업 방해)를 조합해 12개의 시나리오를 구성했다. 다양한 도심·고속도로·교차로 환경에서도 모델은 평균 0.93 이상의 AUROC를 기록했으며, 특히 급격한 차량 탈퇴·재진입 상황에서도 0.90 이상의 검출률을 유지했다.
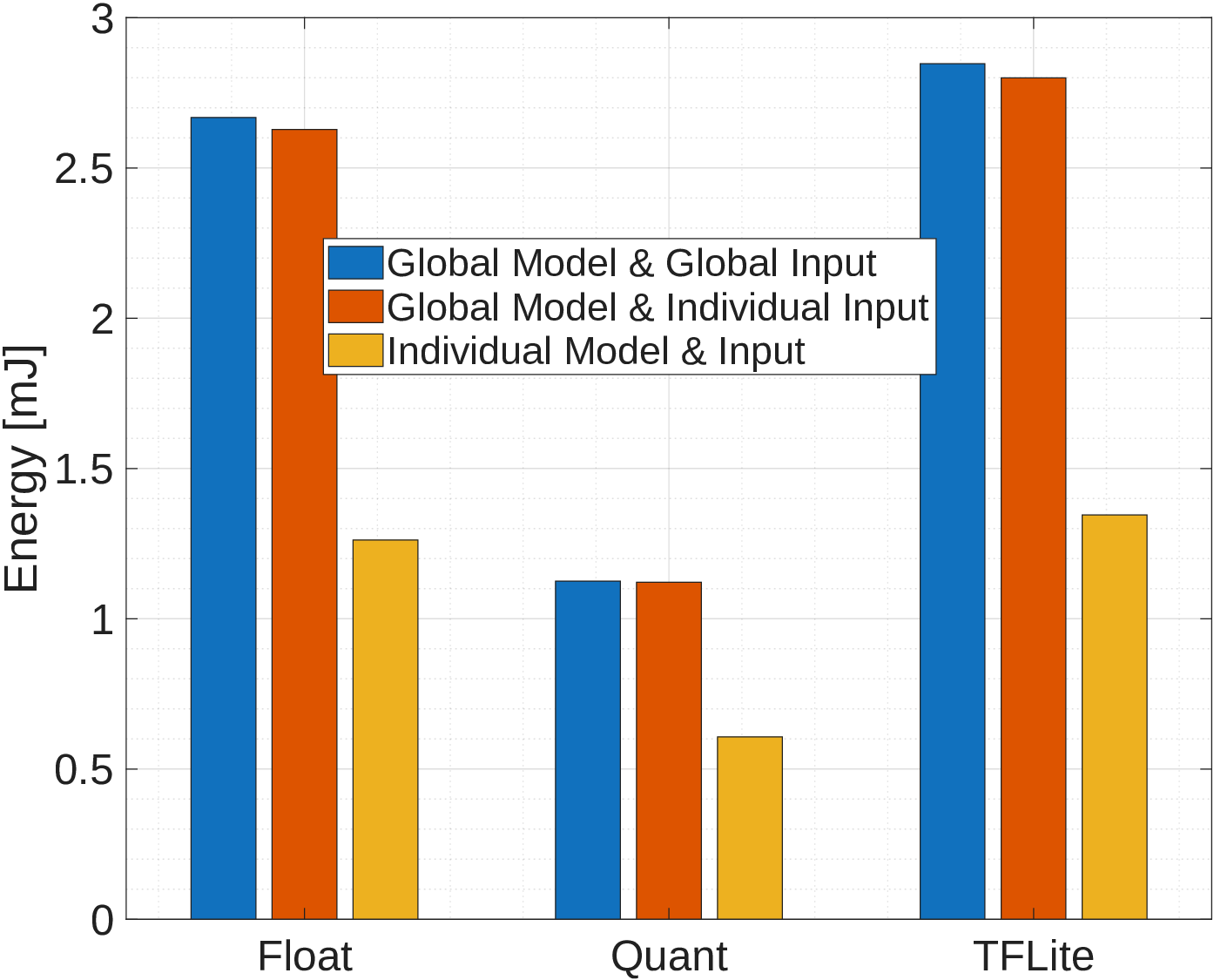
배포 측면에서는 TensorFlow Lite, ONNX, TensorRT로 각각 변환·양자화한 뒤, ARM Cortex‑A53 기반 인포테인먼트 시스템, NVIDIA Jetson‑Nano, 그리고 고성능 차량용 ECU에 탑재해 테스트했다. 최적화 후 평균 추론 시간은 0.68 ms(ONNX‑TensorRT)에서 1.12 ms(TFLite) 사이였으며, 메모리 사용량은 4 MB 이하로 제한되었다. 이는 실시간 제어 주기(10 ms 이하) 내에 탐지 결과를 제공할 수 있음을 의미한다.
한계점으로는 (1) 라벨링된 공격 데이터 확보가 어려워, 실제 현장에서 발생할 수 있는 미지의 공격에 대한 일반화 능력이 아직 검증되지 않았으며, (2) 차량 간 통신 지연·패킷 손실이 심한 환경에서는 어텐션 매트릭스가 불완전해질 가능성이 있다. 향후 연구에서는 (a) 비지도·반감독 학습을 결합해 라벨 의존성을 낮추고, (b) 통신 품질 추정 모듈을 어텐션 가중치에 통합해 견고성을 강화하는 방향을 제시한다.
전반적으로 AIMFORMER는 복합적인 시간‑공간 상관관계를 효과적으로 학습하고, FP를 최소화하는 손실 설계와 엣지 친화적 최적화를 통해 차량 플래토닝 보안 분야에 실용적인 솔루션을 제공한다는 점에서 큰 의의를 가진다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리