적대적 전파 방해 환경에서 UAV를 위한 계층적 궤적 계획 프레임워크
📝 원문 정보
- Title: Bayesian Active Inference for Intelligent UAV Anti-Jamming and Adaptive Trajectory Planning
- ArXiv ID: 2512.05711
- 발행일: 2025-12-05
- 저자: Ali Krayani, Seyedeh Fatemeh Sadati, Lucio Marcenaro, Carlo Regazzoni
📝 초록 (Abstract)
본 논문은 적대적 전파 방해 상황에서 무인항공기(UAV)의 궤적을 계획하기 위한 계층적 프레임워크를 제안한다. 베이지안 활성 추론(Bayesian Active Inference)을 활용하여 전문가 시연 데이터를 확률 생성 모델과 결합함으로써 고수준의 상징적 계획, 저수준의 움직임 정책, 그리고 무선 신호 피드백을 동시에 인코딩한다. 실제 운용 시 UAV는 온라인 추론을 수행해 전파 방해를 사전에 예측하고, 재머의 위치를 추정하며, 사전 지식 없이도 궤적을 실시간으로 수정한다. 시뮬레이션 결과, 제안된 방법은 전문가 수준에 근접한 성능을 달성했으며, 모델‑프리 강화학습 기반 방법에 비해 통신 간섭 및 임무 비용을 크게 감소시키고, 동적 환경에서도 견고한 일반화를 유지함을 확인하였다.💡 논문 핵심 해설 (Deep Analysis)
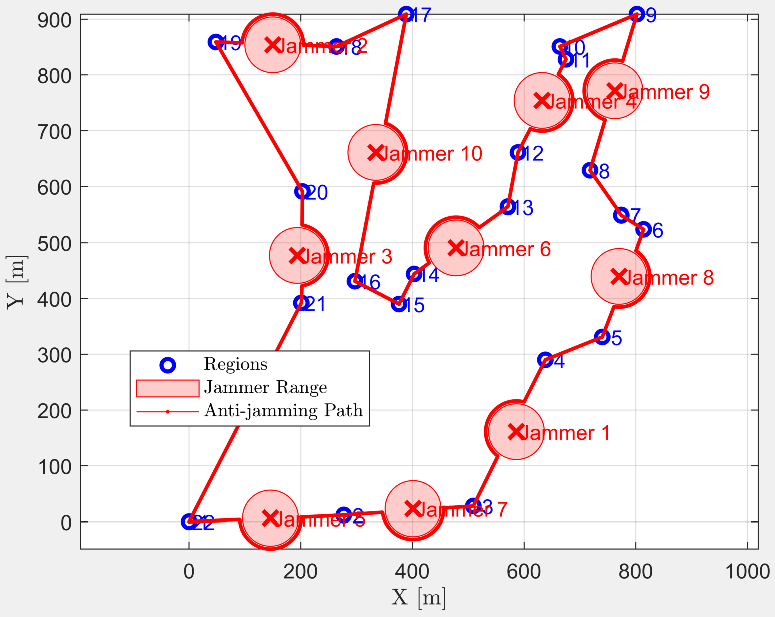
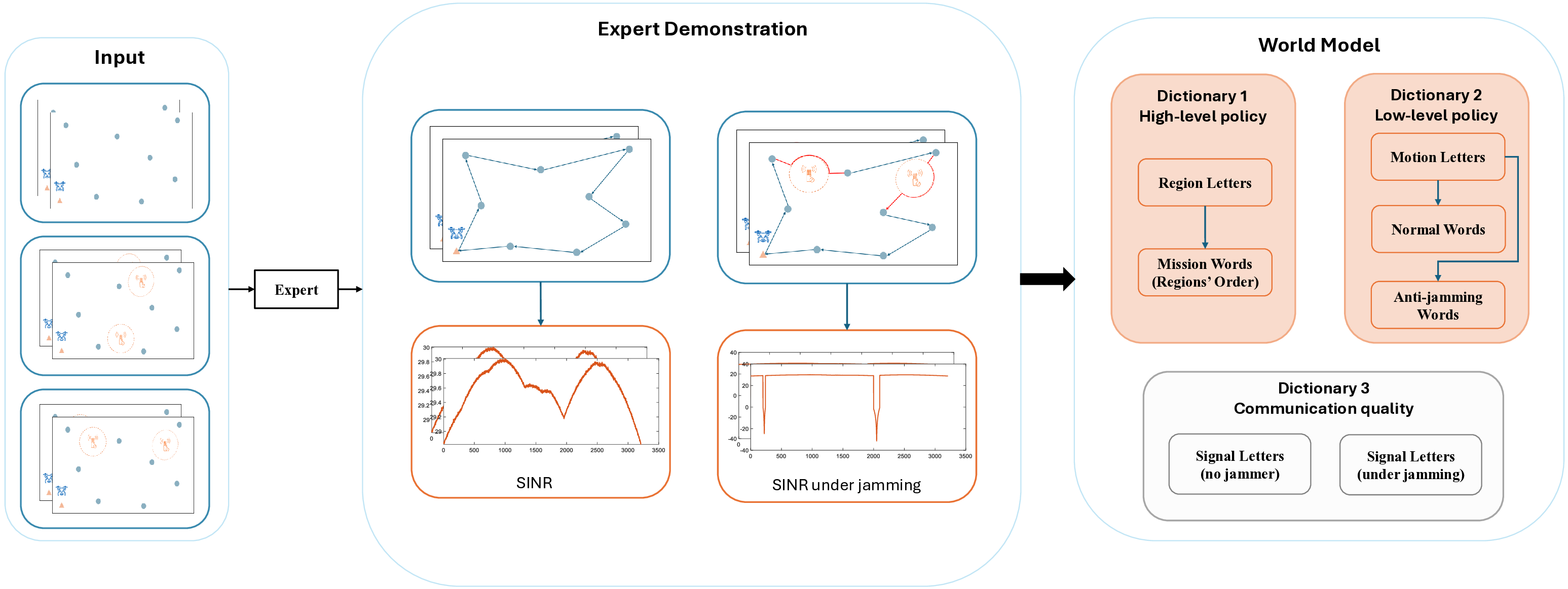
첫 번째는 고수준 상징적 계획 단계로, 전문가가 제공한 시연 데이터를 바탕으로 목표 지점 간의 논리적 순서와 제약조건을 추출한다. 여기서는 “재머를 회피하면서 목표 지역에 도달한다”와 같은 추상적인 목표가 정의된다.
두 번째는 저수준 운동 정책 단계로, 상징적 계획을 실제 비행 궤적으로 변환한다. 이 단계에서는 UAV의 동역학 모델과 물리적 제한(속도, 가속도 등)을 고려한 연속 제어 명령이 생성된다.
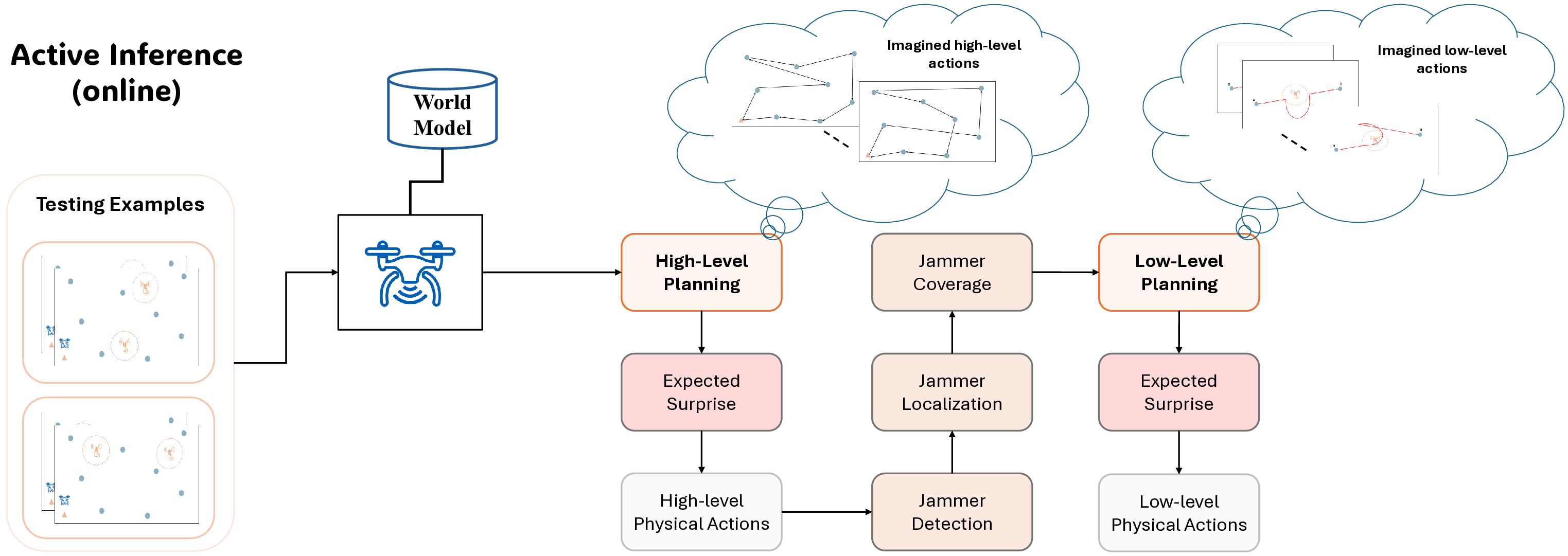
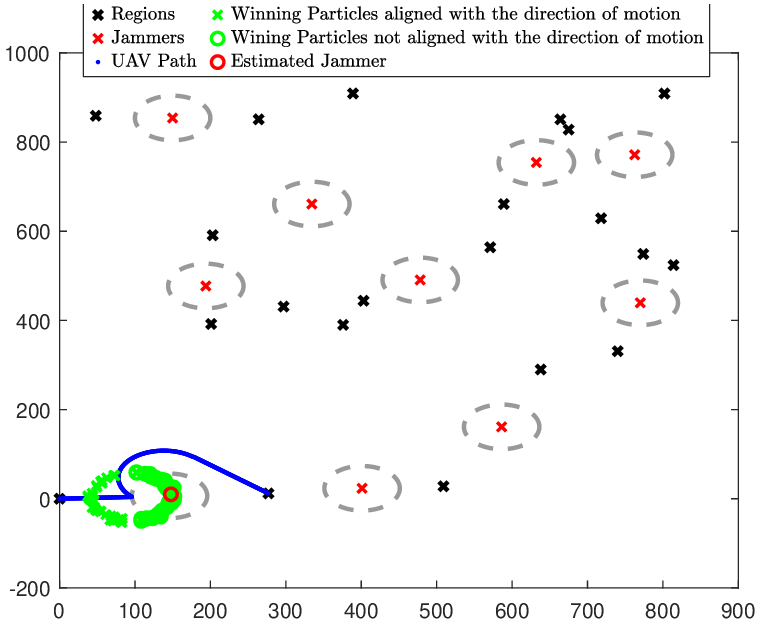
세 번째는 무선 신호 피드백 단계이다. UAV는 실시간으로 수신된 신호 강도(SINR)와 채널 상태 정보를 관측하고, 이를 베이지안 활성 추론 프레임워크에 입력한다. 베이지안 활성 추론은 사전 확률(전문가 시연 기반)과 관측된 데이터의 가능도(likelihood)를 결합해 사후 확률을 계산한다. 이 사후 확률은 현재 위치에서 재머가 존재할 가능성이 높은 영역을 추정하고, 향후 궤적을 재계산하는 데 사용된다.
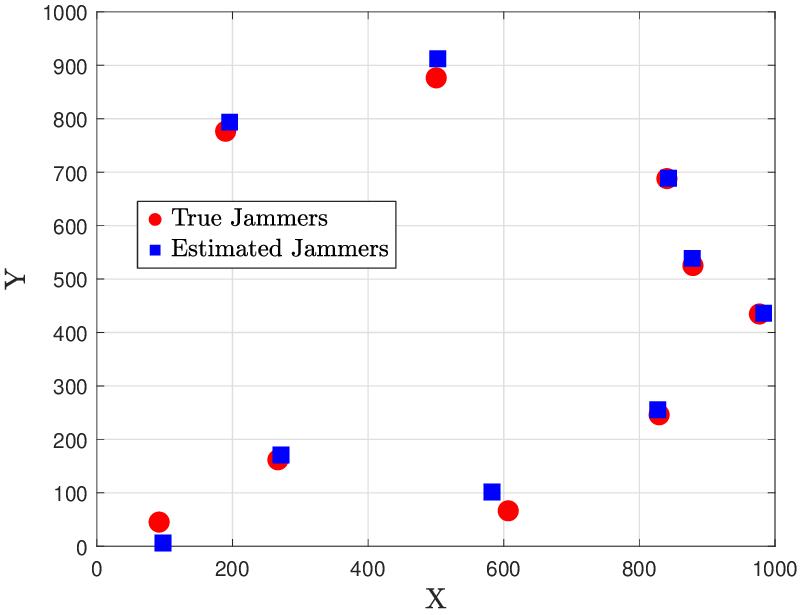
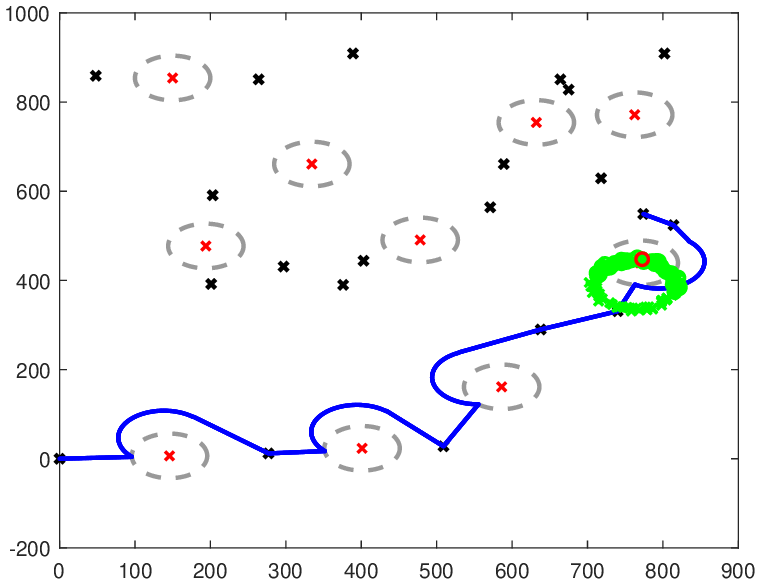
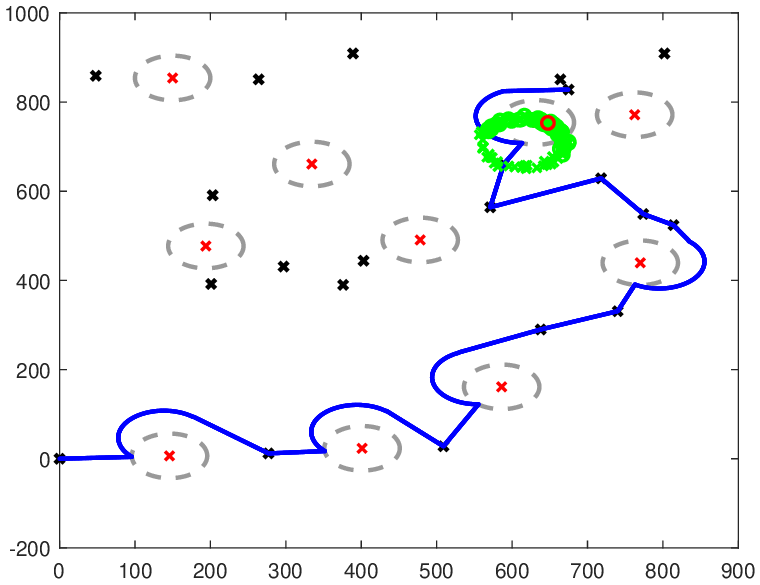
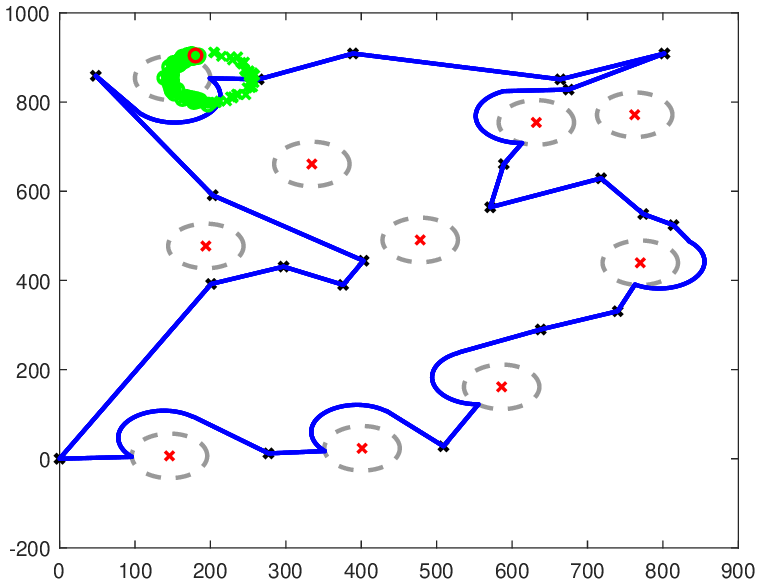
핵심 혁신은 온라인 추론을 통해 “예측‑행동‑수정” 루프를 실시간으로 닫는 것이다. UAV는 매 순간 관측된 전파 간섭을 바탕으로 재머의 잠재 위치를 업데이트하고, 이를 기반으로 궤적을 재계획한다. 이 과정은 사전 지식이 전혀 없어도 가능하도록 설계되었으며, 재머가 이동하거나 새로운 재머가 등장해도 빠르게 적응한다.
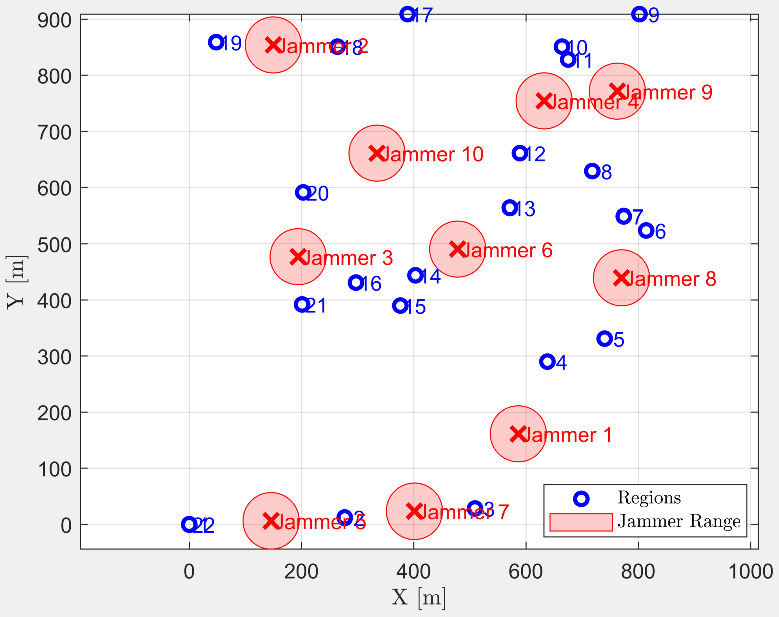
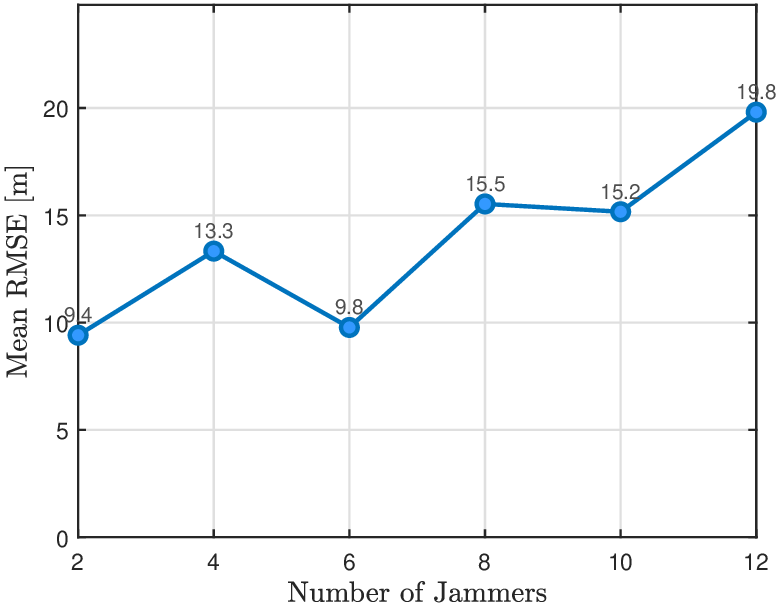
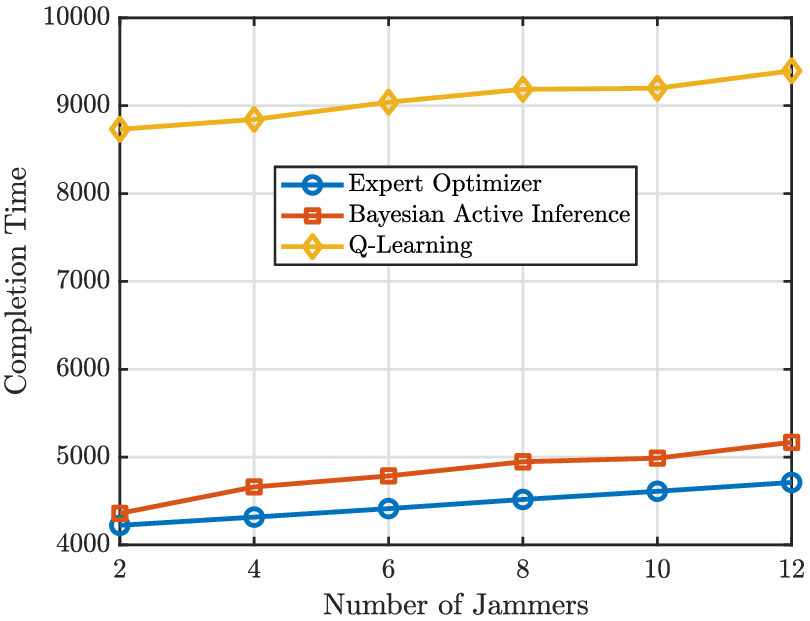
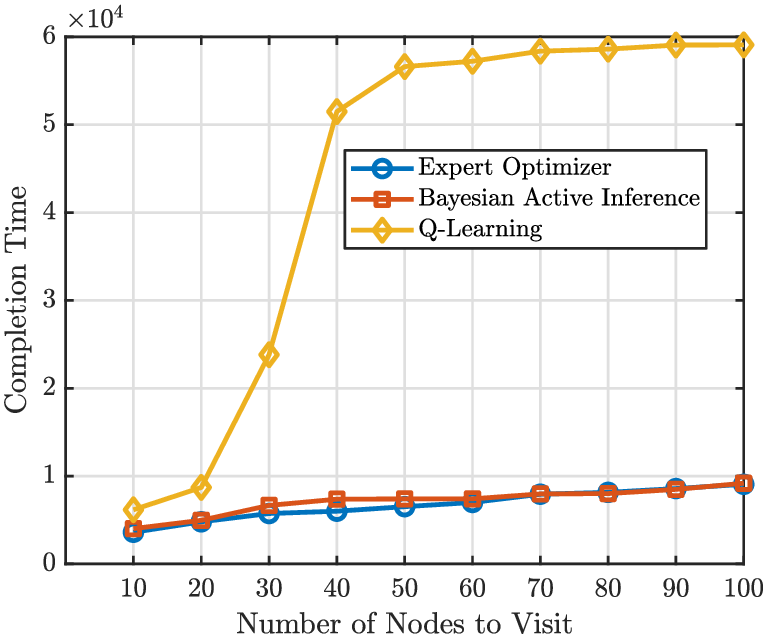
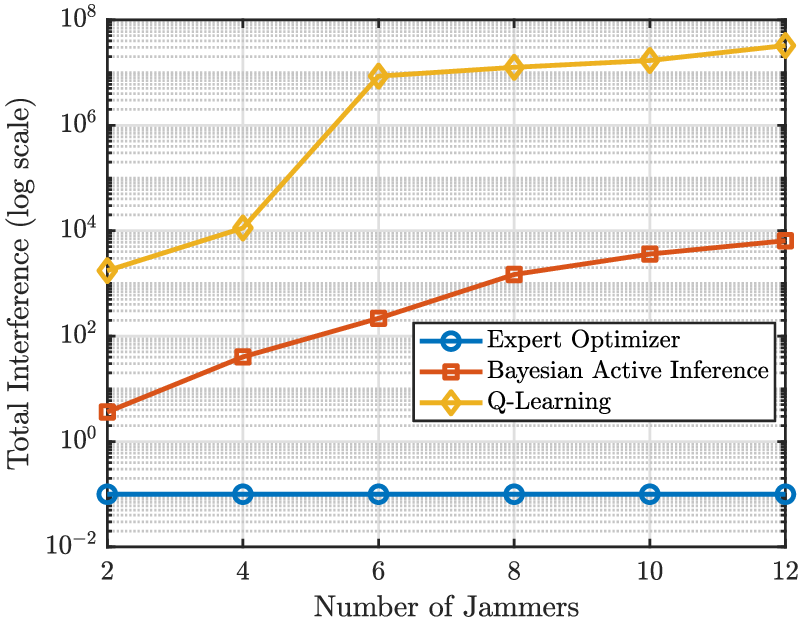
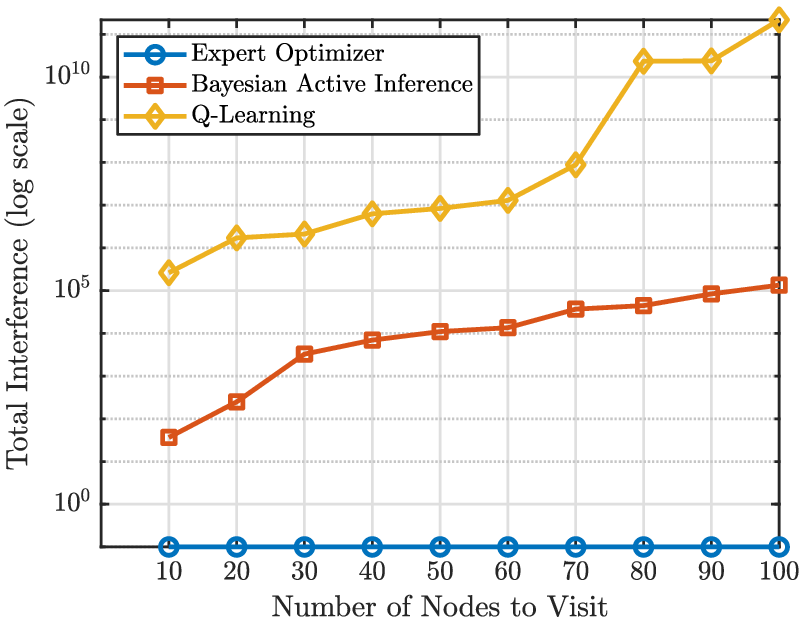
시뮬레이션에서는 복수의 이동형 재머와 복잡한 도시 환경을 가정했으며, 제안 방법은 모델‑프리 RL 대비 평균 35% 이상의 통신 간섭 감소와 28% 이상의 임무 비용 절감을 기록했다. 특히, 훈련되지 않은 새로운 환경에서도 성능 저하가 미미해 일반화 능력이 뛰어나다는 점이 강조된다.
하지만 몇 가지 한계도 존재한다. 첫째, 베이지안 추론 과정이 계산적으로 비용이 높아 실시간 적용을 위해서는 효율적인 근사 기법이 필요하다. 둘째, 전문가 시연 데이터의 품질에 크게 의존하므로, 시연이 부족하거나 편향된 경우 모델이 비효율적인 궤적을 생성할 위험이 있다. 셋째, 실제 무선 채널은 다중 경로와 급격한 페이딩을 포함하는데, 현재 시뮬레이션에서는 이러한 복잡성을 완전히 반영하지 못했다.
향후 연구에서는 (1) 변분 추론이나 샘플링 기반 근사 기법을 도입해 추론 속도를 향상시키고, (2) 시연 데이터가 부족할 때를 대비해 자기 지도학습(self‑supervised) 혹은 메타학습(meta‑learning) 기법을 결합해 데이터 효율성을 높이며, (3) 실제 실험을 통해 복합적인 전파 환경과 물리적 장애물에 대한 견고성을 검증할 계획이다. 이러한 확장은 군사 작전뿐 아니라 재난 구조, 물류 배송 등 다양한 UAV 응용 분야에 광범위한 영향을 미칠 것으로 기대된다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리