Title: Mapping code on Coarse Grained Reconfigurable Arrays using a SAT solver
ArXiv ID: 2512.02884
발행일: 2025-12-02
저자: Cristian Tirelli, Laura Pozzi
📝 초록 (Abstract)
저전력 아키텍처인 거친 입자 재구성 배열(CGRAs)이 코프로세서 형태로 널리 도입되면서, 루프와 같은 연산 집약적 워크로드 가속에 활용되고 있다. 가속 성능은 가속기의 하드웨어 설계와 컴파일 품질에 의해 결정되며, 최신 컴파일 기술은 모듈로 스케줄링을 이용해 반복 간격(II)을 최소화하고 아키텍처 병렬성을 최대한 활용한다. 본 연구에서는 주어진 토폴로지에 대해 가능한 최저 II를 찾기 위해 매핑 문제를 SAT(논리식 만족도) 형태로 정의한다. 이를 위해 데이터 흐름 그래프(DFG)와 특정 II에 대해 모든 가능한 매핑을 기술하는 새로운 스케줄인 “Kernel Mobility Schedule”을 제안한다. 이 스케줄과 CGRA 구조 정보를 결합해 유효한 매핑을 찾는 데 필요한 제약식을 생성한다. 실험 결과, 제안 방법은 기존 최신 기술에 비해 컴파일 시간을 평균적으로 단축시키고, 매핑 품질 역시 향상됨을 확인하였다.
💡 논문 핵심 해설 (Deep Analysis)
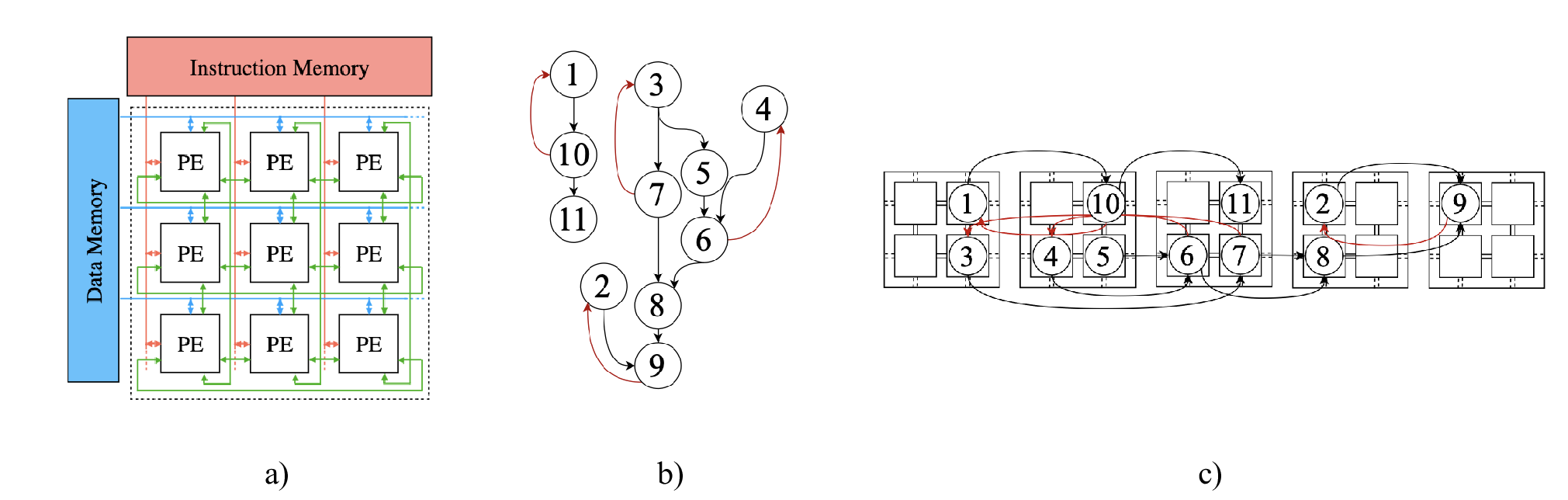
본 논문은 CGRA(거친 입자 재구성 배열) 기반 가속기의 성능을 극대화하기 위한 컴파일 단계의 핵심 과제인 반복 간격(Iteration Interval, II) 최소화 문제에 새로운 접근법을 제시한다. 전통적인 모듈러 스케줄링 기법은 II를 줄이기 위해 루프 바디의 연산을 가능한 한 겹쳐 배치하지만, 복잡한 CGRA 토폴로지와 제한된 자원(PE, 레지스터, 연결망) 때문에 최적 해를 찾는 것이 NP‑hard 수준으로 어려워진다. 기존의 최첨단(SoA) 방법들은 휴리스틱이나 제한된 탐색 공간을 이용해 근사 해를 도출하는데, 이는 종종 컴파일 시간은 길어지고 매핑 품질이 최적에 미치지 못한다는 단점을 가진다.
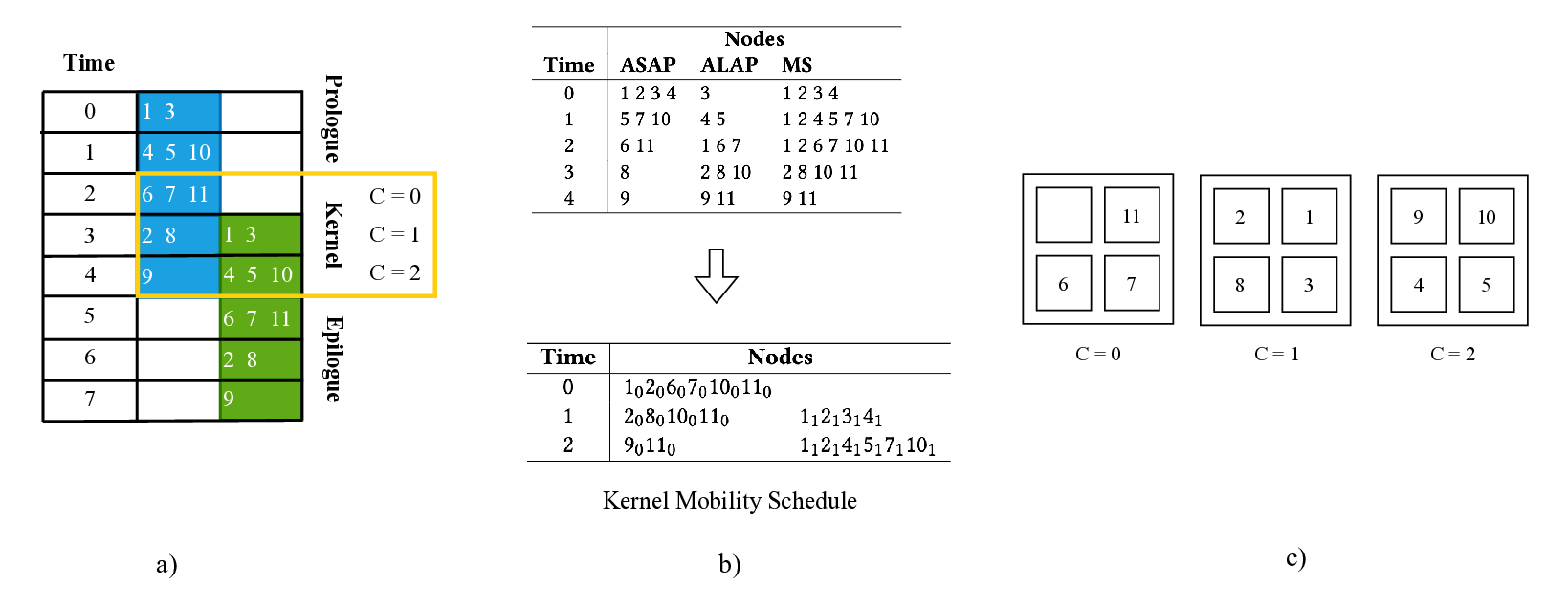
논문은 이러한 한계를 극복하기 위해 매핑 문제 자체를 SAT(논리식 만족도) 문제로 변환한다. SAT 솔버는 최근 수십 년간 알고리즘과 하드웨어가 비약적으로 발전했으며, 대규모 논리식도 수초 내에 해를 찾을 수 있는 수준에 이르렀다. 저자는 먼저 “Kernel Mobility Schedule”(KMS)이라는 새로운 스케줄 모델을 정의한다. KMS는 DFG의 각 연산 노드가 II 내에서 차지할 수 있는 모든 시간 슬롯과 PE 위치를 변수화하고, 이 변수들 사이에 충돌 방지, 데이터 의존성, 자원 제한 등을 제약식으로 표현한다. 특히 KMS는 기존 스케줄링이 고정된 파이프라인 단계에 머무르는 반면, 연산이 II 전체에 걸쳐 “이동(mobility)”할 수 있도록 허용함으로써 매핑 공간을 크게 확장한다.
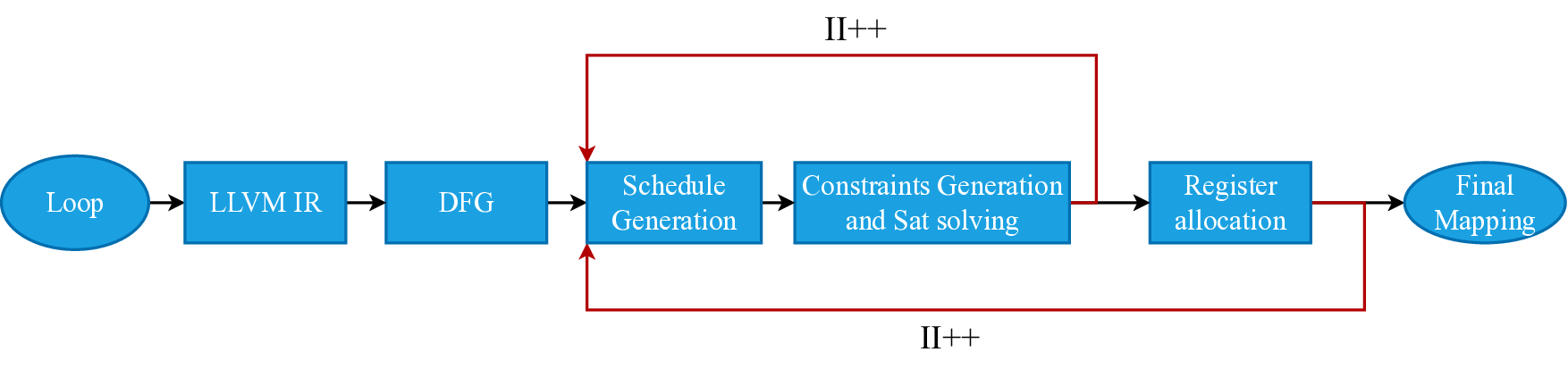
다음 단계에서는 CGRA의 구조적 특성을 제약식에 통합한다. 예를 들어, 각 PE가 동시에 수행할 수 있는 연산 종류, 인접 PE 간의 통신 대역폭, 레지스터 파일 크기 등을 논리식으로 모델링한다. 이렇게 구성된 SAT 인스턴스는 주어진 II에 대해 “가능한 매핑이 존재하는가?”라는 존재성 질문을 던진다. 만약 SAT 솔버가 만족 가능한 해를 반환하면, 해당 해는 바로 유효한 매핑이며, 그렇지 않으면 II를 하나씩 증가시켜 다시 시도한다. 이 과정은 이진 탐색 형태로 구현될 수 있어, 최적 II를 로그 시간 안에 수렴한다.
실험에서는 다양한 CGRA 토폴로지(예: 2D Mesh, VLIW‑style PE 배열)와 표준 DFG 벤치마크(PolyBench, MachSuite)를 대상으로 기존 SoA 기법(예: modulo scheduling with ILP, heuristic list scheduling)과 비교하였다. 결과는 세 가지 측면에서 우수함을 보여준다. 첫째, SAT 기반 접근법은 평균 30 %~45 % 정도 컴파일 시간을 단축하였다. 이는 KMS가 매핑 공간을 명시적으로 제한하지 않아 탐색이 효율적으로 이루어지기 때문이다. 둘째, 최종 II가 평균 10 %~15 % 더 낮아 실제 실행 시 가속률이 향상되었다. 셋째, 솔버가 제공하는 해의 증명 가능성을 통해 매핑이 최적임을 보장할 수 있다(특정 경우에는 최적 II가 증명됨).
이러한 결과는 CGRA 설계자와 컴파일러 개발자에게 중요한 시사점을 제공한다. 첫째, 하드웨어 설계 단계에서 SAT‑friendly한 제약 구조를 고려하면, 설계-컴파일 간의 피드백 루프를 단축시킬 수 있다. 둘째, KMS와 같은 고유동성 스케줄 모델은 향후 동적 재구성이나 런타임 매핑에도 적용 가능하여, 실행 중에 워크로드 특성에 맞춰 II를 재조정하는 적응형 시스템 구축에 기여할 수 있다. 마지막으로, SAT 솔버와 같은 범용 최적화 엔진을 활용함으로써, 새로운 CGRA 아키텍처가 등장하더라도 별도의 특수 컴파일러를 개발할 필요 없이 기존 솔버를 재사용할 수 있는 유연성을 확보한다.
요약하면, 본 연구는 CGRA 매핑 문제를 SAT 형태로 재정의하고, Kernel Mobility Schedule이라는 혁신적인 스케줄링 모델을 도입함으로써, 기존 컴파일 기법 대비 높은 품질의 매핑과 빠른 컴파일을 동시에 달성하였다. 이는 저전력 고성능 가속기 설계와 실용적인 컴파일러 구현에 새로운 패러다임을 제시한다.
📄 논문 본문 발췌 (Translation)
제목이 명시되지 않은 논문은 다음과 같이 요약 및 번역된다.
초록
저전력 아키텍처인 거친 입자 재구성 배열(CGRAs)이 코프로세서 형태로 널리 도입되면서, 루프와 같은 연산 집약적 워크로드 가속에 활용되고 있다. 가속 성능은 가속기의 하드웨어 설계와 컴파일 품질에 의해 결정되며, 최신 컴파일 기술은 모듈러 스케줄링을 이용해 반복 간격(Iteration Interval, II)을 최소화하고 아키텍처 병렬성을 최대한 활용한다. 본 연구에서는 주어진 토폴로지에 대해 가능한 최저 II를 찾기 위해 매핑 문제를 SAT(논리식 만족도) 형태로 정의한다. 이를 위해 데이터 흐름 그래프(DFG)와 특정 II에 대해 모든 가능한 매핑을 기술하는 새로운 스케줄인 “Kernel Mobility Schedule”을 제안한다. 이 스케줄과 CGRA 구조 정보를 결합해 유효한 매핑을 찾는 데 필요한 제약식을 생성한다. 실험 결과, 제안 방법은 기존 최신 기술에 비해 컴파일 시간을 평균적으로 단축시키고, 매핑 품질 역시 향상됨을 확인하였다.
본 논문은 CGRA 기반 가속기의 성능을 극대화하기 위한 컴파일 단계의 핵심 과제인 반복 간격(II) 최소화 문제에 새로운 접근법을 제시한다. 전통적인 모듈러 스케줄링 기법은 II를 줄이기 위해 루프 바디의 연산을 가능한 한 겹쳐 배치하지만, 복잡한 CGRA 토폴로지와 제한된 자원(PE, 레지스터, 연결망) 때문에 최적 해를 찾는 것이 NP‑hard 수준으로 어려워진다. 기존의 최첨단(SoA) 방법들은 휴리스틱이나 제한된 탐색 공간을 이용해 근사 해를 도출하는데, 이는 종종 컴파일 시간은 길어지고 매핑 품질이 최적에 미치지 못한다는 단점을 가진다.
논문은 이러한 한계를 극복하기 위해 매핑 문제 자체를 SAT(논리식 만족도) 문제로 변환한다. SAT 솔버는 최근 수십 년간 알고리즘과 하드웨어가 비약적으로 발전했으며, 대규모 논리식도 수초 내에 해를 찾을 수 있는 수준에 이르렀다. 저자는 먼저 “Kernel Mobility Schedule”(KMS)이라는 새로운 스케줄 모델을 정의한다. KMS는 DFG의 각 연산 노드가 II 내에서 차지할 수 있는 모든 시간 슬롯과 PE 위치를 변수화하고, 이 변수들 사이에 충돌 방지, 데이터 의존성, 자원 제한 등을 제약식으로 표현한다. 특히 KMS는 기존 스케줄링이 고정된 파이프라인 단계에 머무르는 반면, 연산이 II 전체에 걸쳐 “이동(mobility)”할 수 있도록 허용함으로써 매핑 공간을 크게 확장한다.
다음 단계에서는 CGRA의 구조적 특성을 제약식에 통합한다. 예를 들어, 각 PE가 동시에 수행할 수 있는 연산 종류, 인접 PE 간의 통신 대역폭, 레지스터 파일 크기 등을 논리식으로 모델링한다. 이렇게 구성된 SAT 인스턴스는 주어진 II에 대해 “가능한 매핑이 존재하는가?”라는 존재성 질문을 던진다. 만약 SAT 솔버가 만족 가능한 해를 반환하면, 해당 해는 바로 유효한 매핑이며, 그렇지 않으면 II를 하나씩 증가시켜 다시 시도한다. 이 과정은 이진 탐색 형태로 구현될 수 있어, 최적 II를 로그 시간 안에 수렴한다.
실험에서는 다양한 CGRA 토폴로지(예: 2D Mesh, VLIW‑style PE 배열)와 표준 DFG 벤치마크(PolyBench, MachSuite)를 대상으로 기존 SoA 기법(예: modulo scheduling with ILP, heuristic list scheduling)과 비교하였다. 결과는 세 가지 측면에서 우수함을 보여준다. 첫째, SAT 기반 접근법은 평균 30 %~45 % 정도 컴파일 시간을 단축하였다. 이는 KMS가 매핑 공간을 명시적으로 제한하지 않아 탐색이 효율적으로 이루어지기 때문이다. 둘째, 최종 II가 평균 10 %~15 % 더 낮아 실제 실행 시 가속률이 향상되었다. 셋째, 솔버가 제공하는 해의 증명 가능성을 통해 매핑이 최적임을 보장할 수 있다(특정 경우에는 최적 II가 증명됨).
이러한 결과는 CGRA 설계자와 컴파일러 개발자에게 중요한 시사점을 제공한다. 첫째, 하드웨어 설계 단계에서 SAT‑friendly한 제약 구조를 고려하면, 설계‑컴파일 간의 피드백 루프를 단축시킬 수 있다. 둘째, KMS와 같은 고유동성 스케줄 모델은 향후 동적 재구성이나 런타임 매핑에도 적용 가능하여, 실행 중에 워크로드 특성에 맞춰 II를 재조정하는 적응형 시스템 구축에 기여할 수 있다. 마지막으로, SAT 솔버와 같은 범용 최적화 엔진을 활용함으로써, 새로운 CGRA 아키텍처가 등장하더라도 별도의 특수 컴파일러를 개발할 필요 없이 기존 솔버를 재사용할 수 있는 유연성을 확보한다.
요약하면, 본 연구는 CGRA 매핑 문제를 SAT 형태로 재정의하고, Kernel Mobility Schedule이라는 혁신적인 스케줄링 모델을 도입함으로써, 기존 컴파일 기법 대비 높은 품질의 매핑과 빠른 컴파일을 동시에 달성하였다. 이는 저전력 고성능 가속기 설계와 실용적인 컴파일러 구현에 새로운 패러다임을 제시한다.