Gaussian 서펠 기반 라이다 포인트 클라우드 완성 및 건물 규모 고속 처리 기술
📝 원문 정보
- Title: SurfFill: Completion of LiDAR Point Clouds via Gaussian Surfel Splatting
- ArXiv ID: 2512.03010
- 발행일: 2025-12-02
- 저자: Svenja Strobel, Matthias Innmann, Bernhard Egger, Marc Stamminger, Linus Franke
📝 초록 (Abstract)
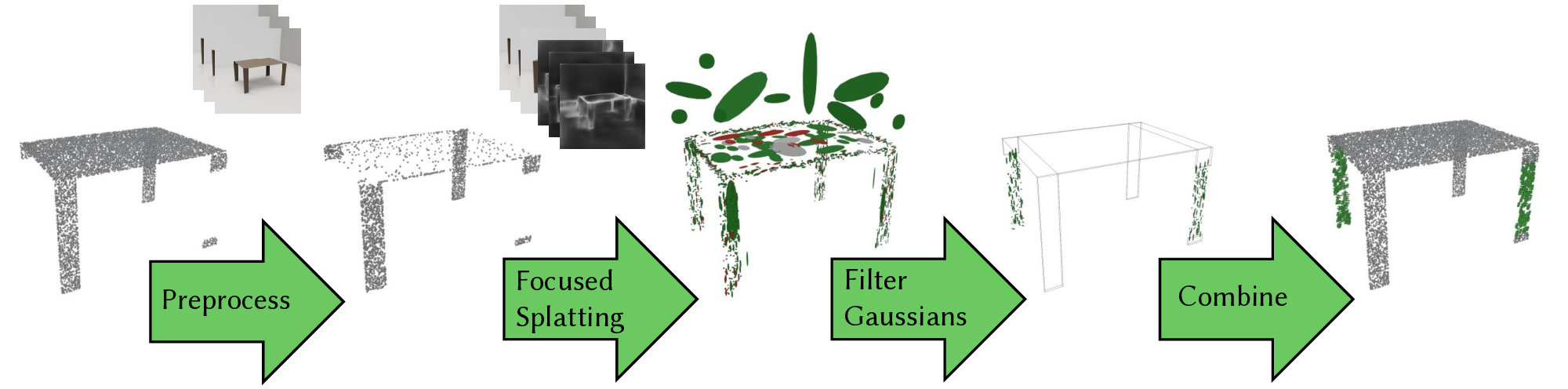
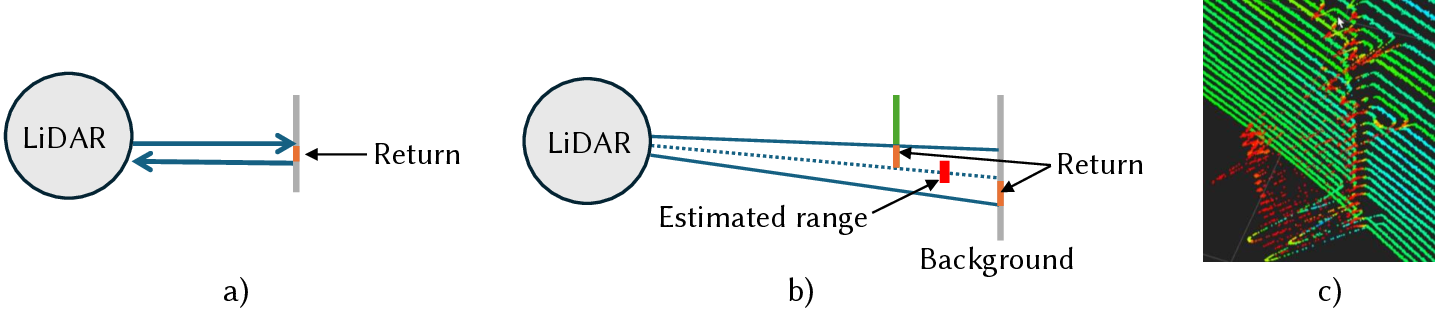
본 연구에서는 라이다 스캔으로 얻은 점군의 누락 영역을 Gaussian 서펠 기반 3차원 재구성을 통해 정밀히 보완한다. 오류가 발생한 영역을 분석하고 점군의 모호성 및 시각 데이터의 높은 불확실성을 식별한다. 이후 2차원 Gaussian 스플래팅 기법을 활용해 누락된 구조를 복원하고, 필터링 및 샘플링 과정을 거쳐 점군을 완전하게 만든다. 마지막으로 분할‑정복 방식을 도입해 건물 규모의 대용량 점군을 75분 이내에 처리한다.💡 논문 핵심 해설 (Deep Analysis)
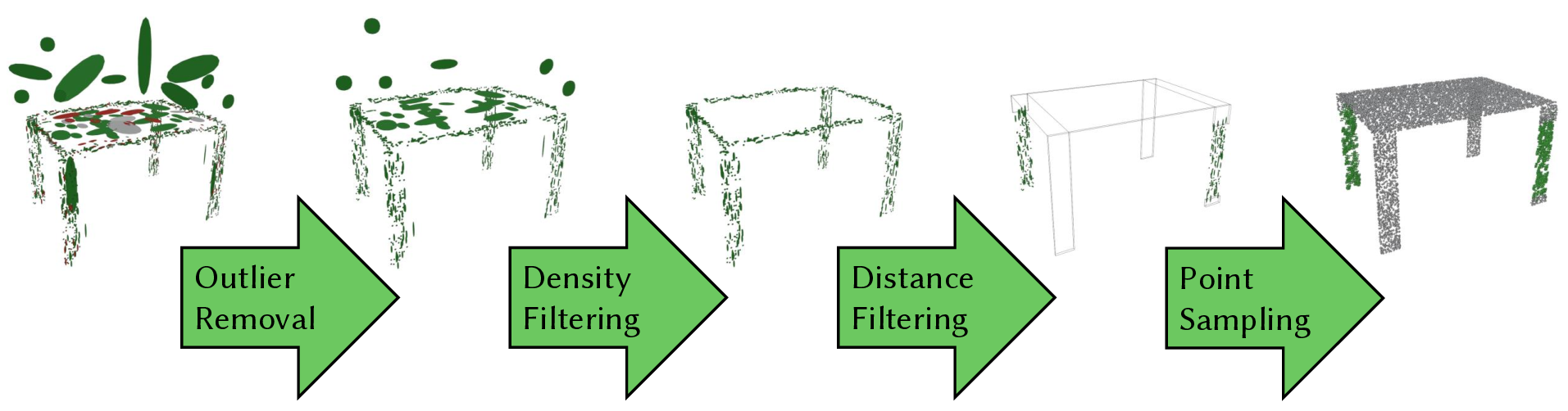
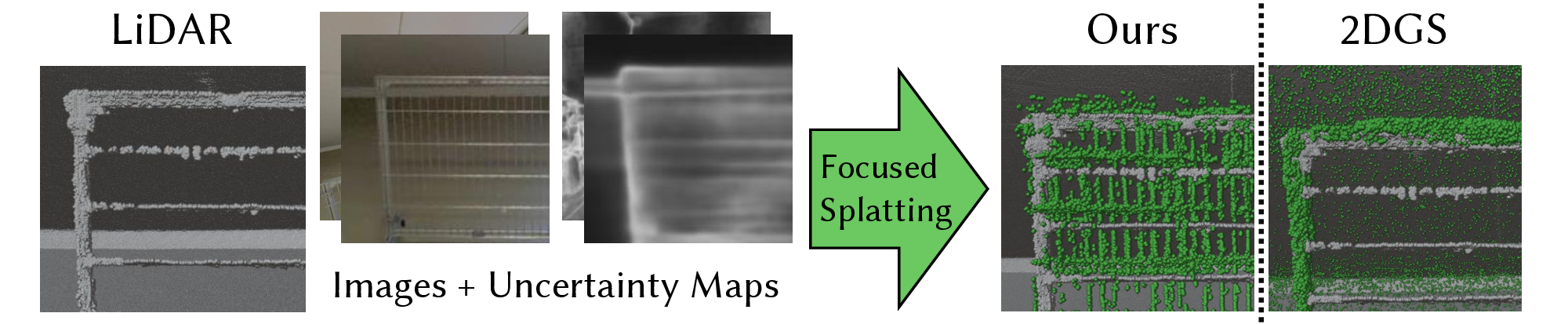
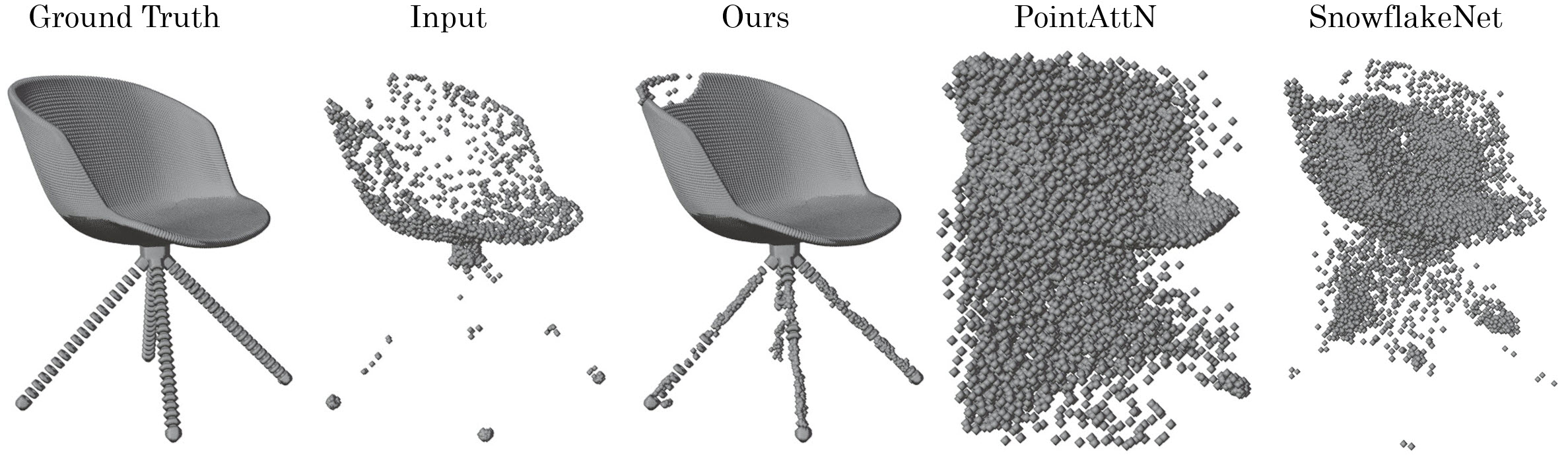
다음 단계에서는 2차원 Gaussian 스플래팅(2D Gaussian Splatting) 기법을 적용한다. 이는 서펠의 중심을 화면에 투사한 뒤, 가우시안 커널을 이용해 연속적인 밀도 맵을 생성하고, 이를 기반으로 누락된 구조를 복원하는 과정이다. 이때 커널의 표준편차와 가중치를 동적으로 조정하여, 얇은 와이어프레임부터 두꺼운 벽면까지 다양한 스케일의 형상을 정확히 재구성한다. 복원된 밀도 맵은 이후 고품질 필터링(예: bilateral filter)과 샘플링(예: Poisson Disk Sampling)을 통해 잡음을 제거하고, 균일한 점 간격을 유지한 최종 포인트 클라우드로 변환된다.
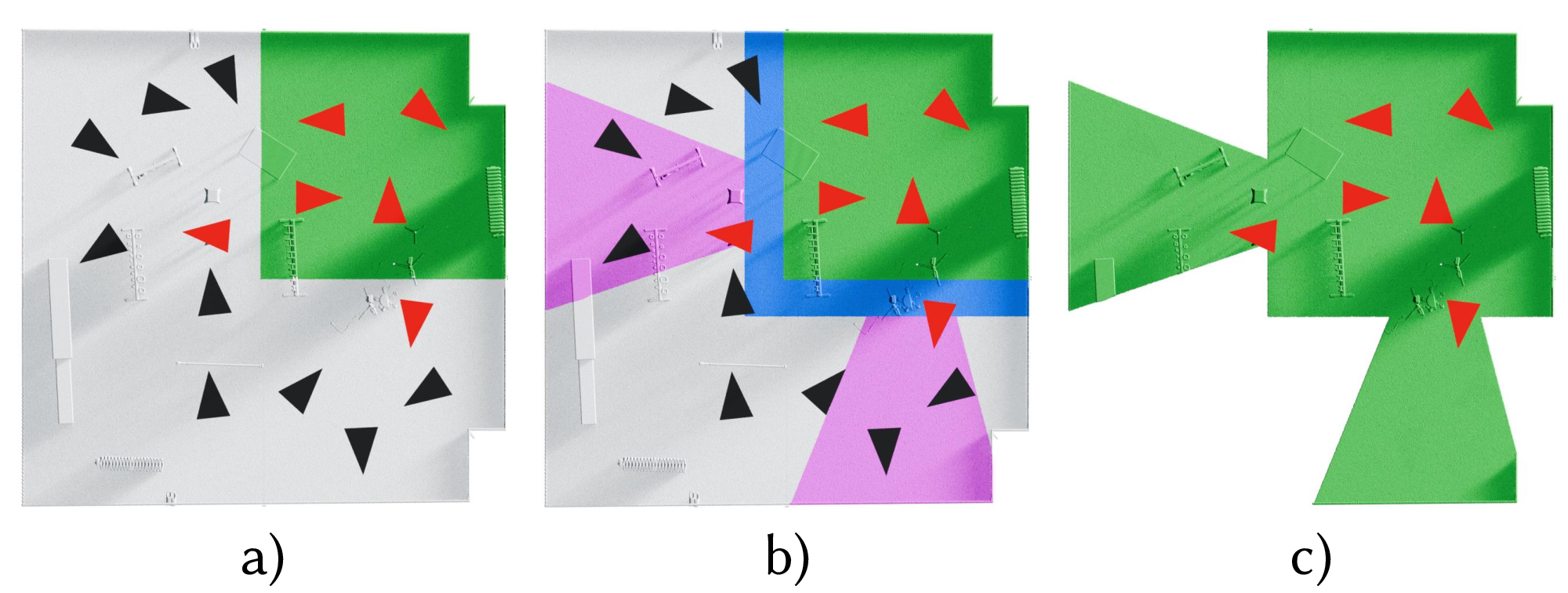
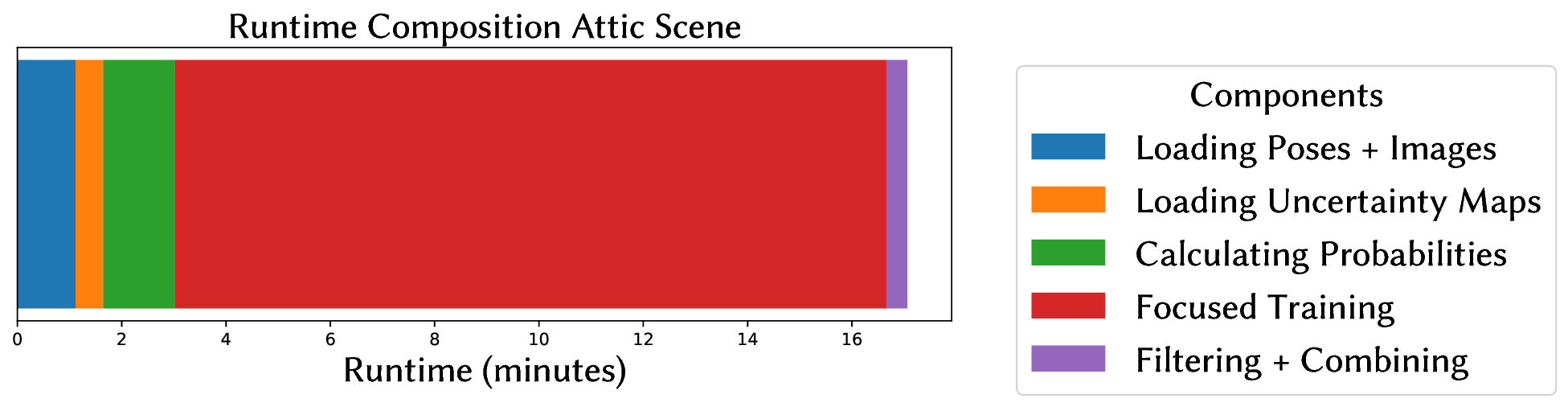
특히 저자들은 대규모 건물 전체를 처리하기 위해 ‘분할‑정복(divide‑and‑conquer)’ 전략을 도입하였다. 전체 점군을 공간적으로 여러 서브 블록으로 나눈 뒤, 각 블록을 독립적으로 위의 복원 파이프라인에 투입한다. 병렬 처리와 메모리 효율성을 극대화함으로써, 수십억 개의 점을 포함하는 건물 규모 데이터도 75분 이내에 완전한 형태로 복원할 수 있었다.
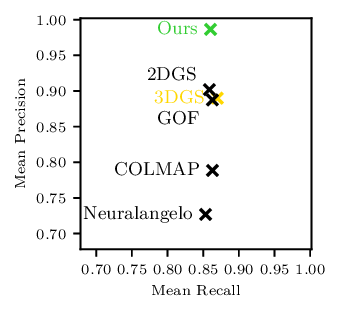
이 방법의 주요 장점은 (1) Gaussian 서펠을 활용한 확률적 모델링으로 불확실성을 정량화하고, (2) 2D Gaussian 스플래팅을 통한 고해상도 복원, (3) 분할‑정복을 통한 확장성이다. 그러나 현재 시스템은 서펠 파라미터 설정에 경험적 튜닝이 필요하고, 매우 얇은 구조물(예: 와이어, 파이프)의 경우 커널 크기 선택에 민감한 점이 있다. 향후 연구에서는 자동 파라미터 최적화와 딥러닝 기반 서펠 생성 모델을 결합해 복원 정확도를 더욱 향상시키고, 실시간 스트리밍 라이다 데이터에 적용할 수 있는 경량화 방안을 모색할 수 있다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리